
一种适用于智能机器人的传动行走机构.pdf

猫巷****傲柏


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种适用于智能机器人的传动行走机构.pdf
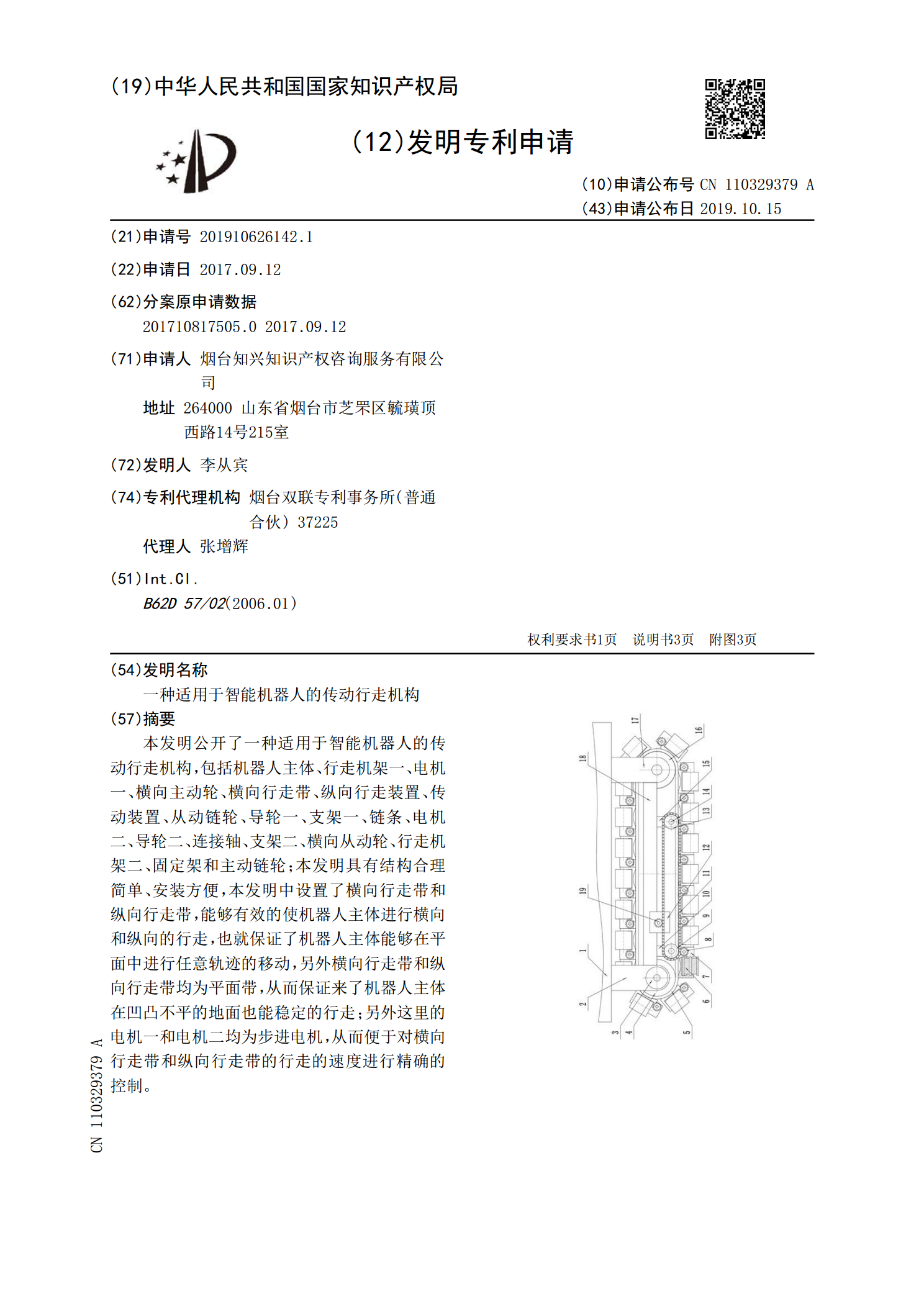
本发明公开了一种适用于智能机器人的传动行走机构,包括机器人主体、行走机架一、电机一、横向主动轮、横向行走带、纵向行走装置、传动装置、从动链轮、导轮一、支架一、链条、电机二、导轮二、连接轴、支架二、横向从动轮、行走机架二、固定架和主动链轮;本发明具有结构合理简单、安装方便,本发明中设置了横向行走带和纵向行走带,能够有效的使机器人主体进行横向和纵向的行走,也就保证了机器人主体能够在平面中进行任意轨迹的移动,另外横向行走带和纵向行走带均为平面带,从而保证来了机器人主体在凹凸不平的地面也能稳定的行走;另外这里的电

一种适用于智能机器人的传动行走机构.pdf
本发明公开了一种适用于智能机器人的传动行走机构,包括机器人主体、行走机架一、电机一、横向主动轮、横向行走带、纵向行走装置、传动装置、从动链轮、导轮一、支架一、链条、电机二、导轮二、连接轴、支架二、横向从动轮、行走机架二、固定架和主动链轮;本发明具有结构合理简单、安装方便,本发明中设置了横向行走带和纵向行走带,能够有效的使机器人主体进行横向和纵向的行走,也就保证了机器人主体能够在平面中进行任意轨迹的移动,另外横向行走带和纵向行走带均为平面带,从而保证来了机器人主体在凹凸不平的地面也能稳定的行走;另外这里的电

一种智能机器人的行走机构.pdf
本发明公开了一种智能机器人的行走机构,包括机器人,所述机器人的底侧固定安装有底座,底座上开设有电机腔,电机腔内固定安装有电机,底座上基于电机腔对称开设有两个空腔,电机腔的两侧内壁上均开设有通孔,通孔内转动安装有转轴,转轴靠近电机腔的一端延伸至电机腔内并与电机的输出轴固定连接,转轴的另一端延伸至空腔内并固定套接有螺杆,螺杆上螺纹套接有滑块,滑块的底侧转动安装有转杆,空腔的底侧内壁上开设有贯穿孔,贯穿孔内滑动安装有支杆,支杆的顶端延伸至空腔内并与转杆转动连接,支杆的底端安装有滚轮。本发明可使滚轮进行伸缩,方便
一种智能扫地机器人的行走机构.pdf
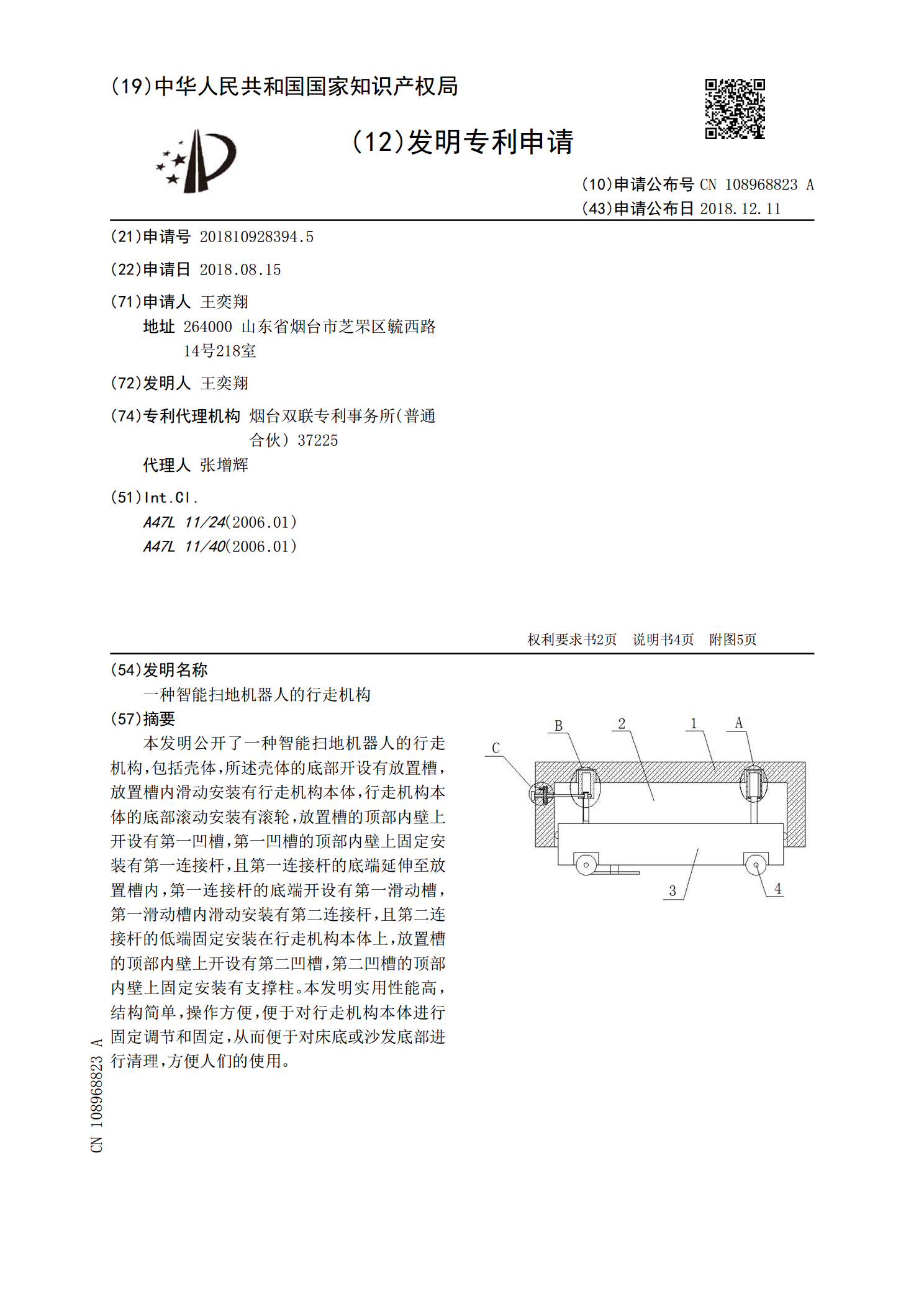
本发明公开了一种智能扫地机器人的行走机构,包括壳体,所述壳体的底部开设有放置槽,放置槽内滑动安装有行走机构本体,行走机构本体的底部滚动安装有滚轮,放置槽的顶部内壁上开设有第一凹槽,第一凹槽的顶部内壁上固定安装有第一连接杆,且第一连接杆的底端延伸至放置槽内,第一连接杆的底端开设有第一滑动槽,第一滑动槽内滑动安装有第二连接杆,且第二连接杆的低端固定安装在行走机构本体上,放置槽的顶部内壁上开设有第二凹槽,第二凹槽的顶部内壁上固定安装有支撑柱。本发明实用性能高,结构简单,操作方便,便于对行走机构本体进行固定调节和

一种智能扫地机器人的行走机构.pdf
本发明公开了一种智能扫地机器人的行走机构,属于智能家居技术领域。智能扫地机器人的行走机构包括机架、行走轮、动力源、控制器、第一传感器和跨障部,行走机构处于扫地状态时,若第一传感器检测到机架前方不存在障碍物,跨障部收起且行走轮带动机架行走,若第一传感器检测到机架前方存在障碍物,控制器控制跨障部工作,跨障部将机架举升且带动机架前进。将本发明提供的行走机构应用到扫地机器人上,能够使扫地机器人可以跨越一定高度的障碍物,进而对障碍物另外一侧或障碍物上方的工作面进行清洁,有效扩大扫地机器人的清洁范围。