
主动可变刚度柔性关节的仿生设计与研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

主动可变刚度柔性关节的仿生设计与研究的开题报告.docx
主动可变刚度柔性关节的仿生设计与研究的开题报告开题报告:主动可变刚度柔性关节的仿生设计与研究一、研究背景柔性关节在仿生机器人中有着重要的应用,能够使机器人在复杂的环境中灵活自如地运动。但是,在某些场合中,需要机器人具有更高的刚度,以便更好地完成任务。因此,开发一种主动可变刚度柔性关节具有重要的应用价值。二、研究意义主动可变刚度柔性关节是一种复杂的设计,需要结合机械、电子、控制等多个学科学习。研究此类柔性关节的设计和实现,能够提高学生的跨学科学习能力,培养创新精神,同时也有助于推动机器人技术的发展。三、研究

一种可变刚度的柔性关节.pdf
本发明公开一种可变刚度的柔性关节,该柔性关节包括下圆盘、中圆盘、上圆盘、外罩、调刚度外壳、主电机输入轴、从动轴、异形齿轮输入轴、从动异形齿轮输入轴、调刚度轴、轴承、一级输入齿轮、一级从动齿轮、二级输入齿轮、二级从动齿轮、三级输入齿轮、三级从动齿轮、调刚度输入齿轮、调刚度从动齿轮、主动异形齿轮、从动异形齿轮、调刚度直流电机、电机固定支架和扭簧;所述下圆盘、中圆盘与上圆盘与外罩固定连接;所述调刚度外壳与上圆盘固定连接;所述主电机输入轴与主电机同步旋转,并通过键与一级输入齿轮连接;所述一级从动齿轮与一级输入齿轮
一种可变刚度的柔性关节.pdf
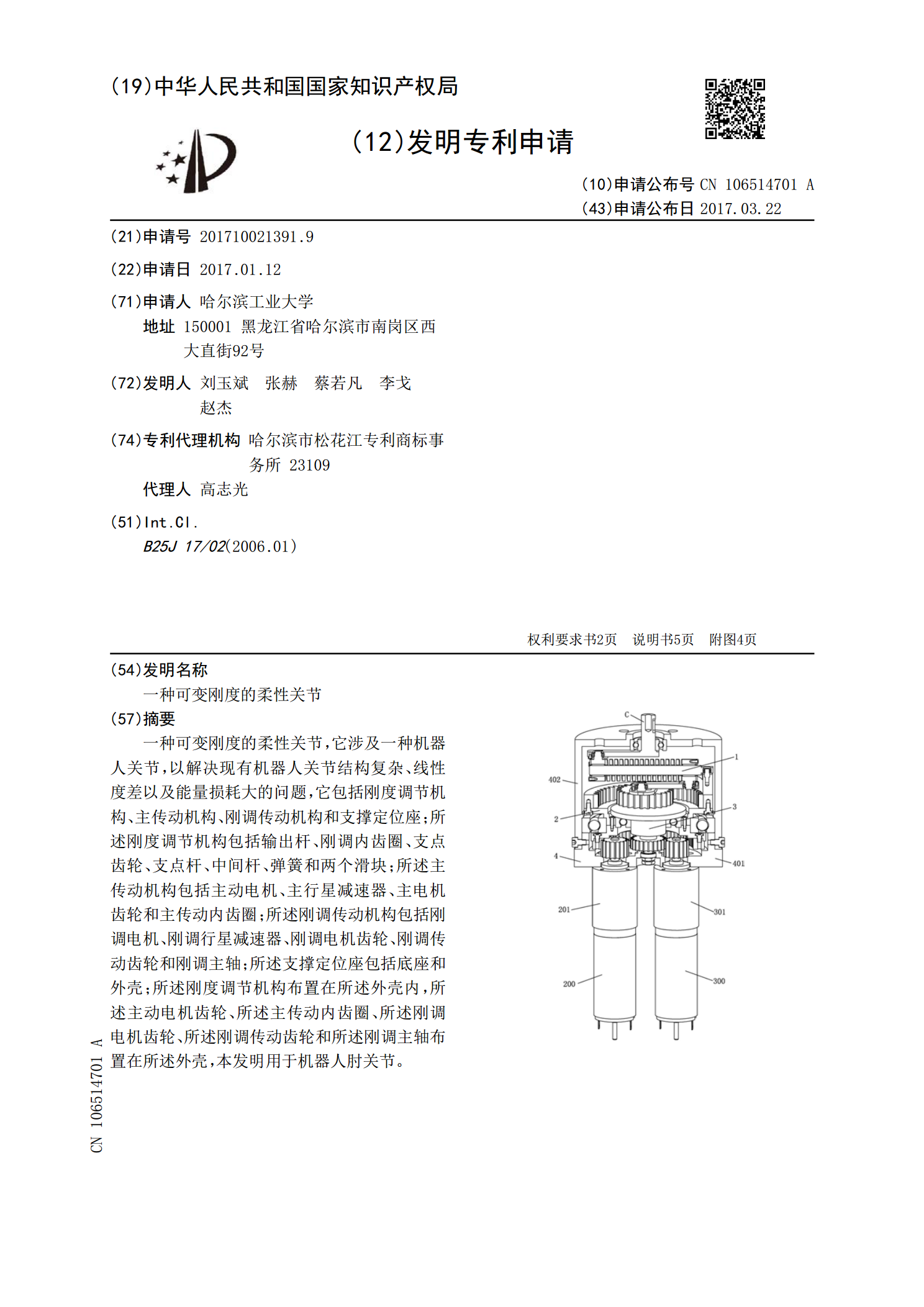
一种可变刚度的柔性关节,它涉及一种机器人关节,以解决现有机器人关节结构复杂、线性度差以及能量损耗大的问题,它包括刚度调节机构、主传动机构、刚调传动机构和支撑定位座;所述刚度调节机构包括输出杆、刚调内齿圈、支点齿轮、支点杆、中间杆、弹簧和两个滑块;所述主传动机构包括主动电机、主行星减速器、主电机齿轮和主传动内齿圈;所述刚调传动机构包括刚调电机、刚调行星减速器、刚调电机齿轮、刚调传动齿轮和刚调主轴;所述支撑定位座包括底座和外壳;所述刚度调节机构布置在所述外壳内,所述主动电机齿轮、所述主传动内齿圈、所述刚调电机

仿人机器人可变刚度柔性关节设计.pdf
本发明公开了一种仿人机器人可变刚度柔性关节,主要包括可变柔性关节驱动器、2D差分驱动关节机构。所述的可变柔性关节驱动器,主要包括微型驱动单元、电机支架、弹性单元。所述的2D差分驱动关节,主要包括柔索输入轮、输出轮、柔索。其特征在于:所述的可变刚度柔性关节驱动器,引入特殊弹性元件,刚性可变,以适应不同步行阶段关节刚度需要,并且能够存储/释放能量和吸收冲击;所述的可变柔性关节驱动器通过柔索与2-DOF差分驱动关节机构相连,无冗余驱动;采所述的2-DOF差分机构,采用柔索传动,较齿轮设计,结构简单,摩擦小,无回

可变刚度关节的机械设计与跟踪控制的开题报告.docx
可变刚度关节的机械设计与跟踪控制的开题报告一、题目可变刚度关节的机械设计与跟踪控制二、研究背景随着机器人技术不断发展,可变刚度关节逐渐成为机器人设计中的重要组成部分。可变刚度关节可以实现机器人在不同工作环境下的适应性,提高了机器人的精度和稳定性,并且可以避免机器人在工作时因为某些因素出现扭曲变形等损坏。目前,研究人员对可变刚度关节的机械设计和跟踪控制方面的研究也越来越多。然而,目前的研究还存在一些问题,如机械设计的复杂性和控制算法的可靠性等方面,需要进一步深入研究和探索。三、研究意义本研究旨在通过对可变刚