
一种可变刚度的柔性关节.pdf

Ja****23


1/8
2/8
3/8
4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可变刚度的柔性关节.pdf
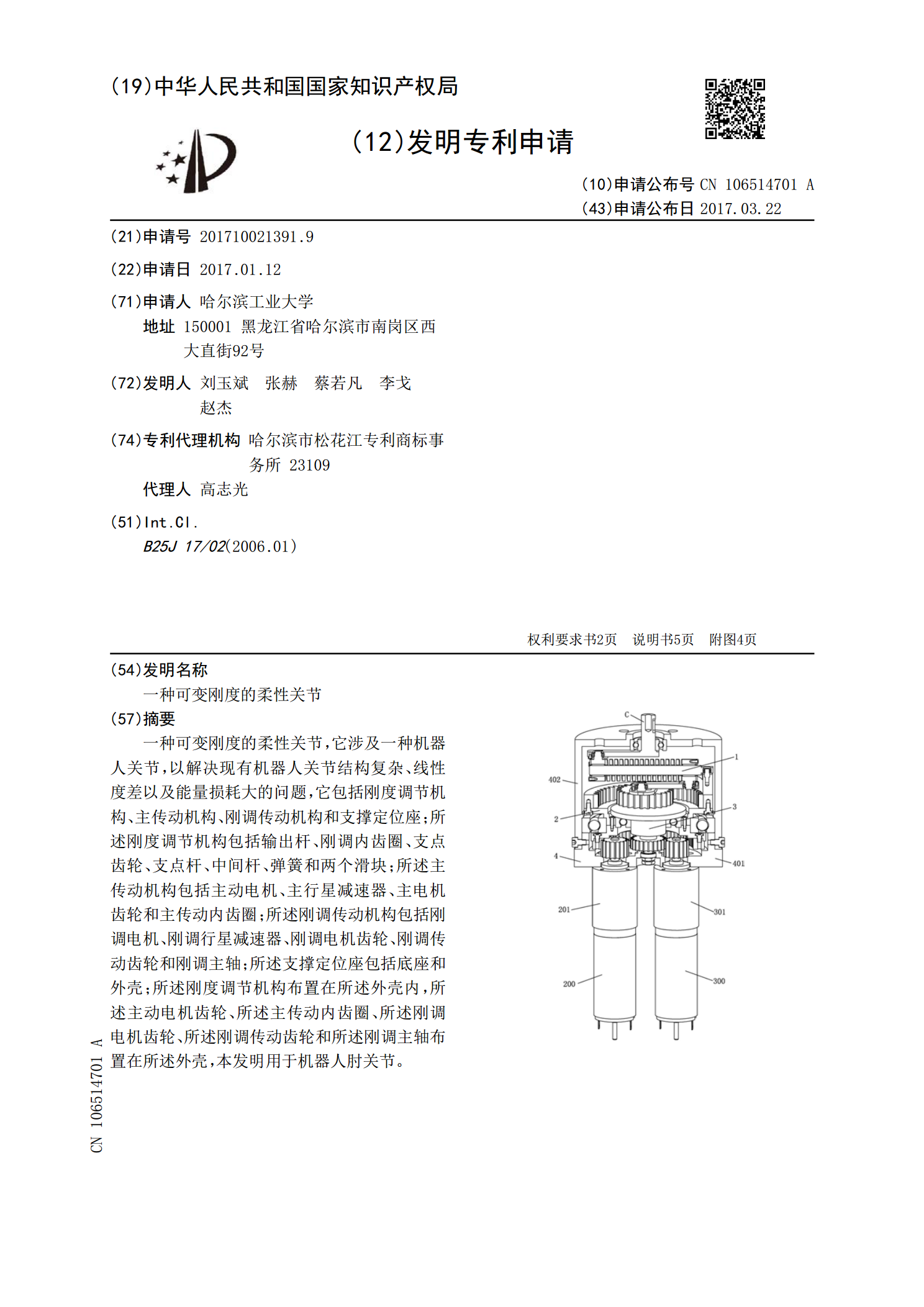
一种可变刚度的柔性关节,它涉及一种机器人关节,以解决现有机器人关节结构复杂、线性度差以及能量损耗大的问题,它包括刚度调节机构、主传动机构、刚调传动机构和支撑定位座;所述刚度调节机构包括输出杆、刚调内齿圈、支点齿轮、支点杆、中间杆、弹簧和两个滑块;所述主传动机构包括主动电机、主行星减速器、主电机齿轮和主传动内齿圈;所述刚调传动机构包括刚调电机、刚调行星减速器、刚调电机齿轮、刚调传动齿轮和刚调主轴;所述支撑定位座包括底座和外壳;所述刚度调节机构布置在所述外壳内,所述主动电机齿轮、所述主传动内齿圈、所述刚调电机

一种可变刚度的柔性关节.pdf
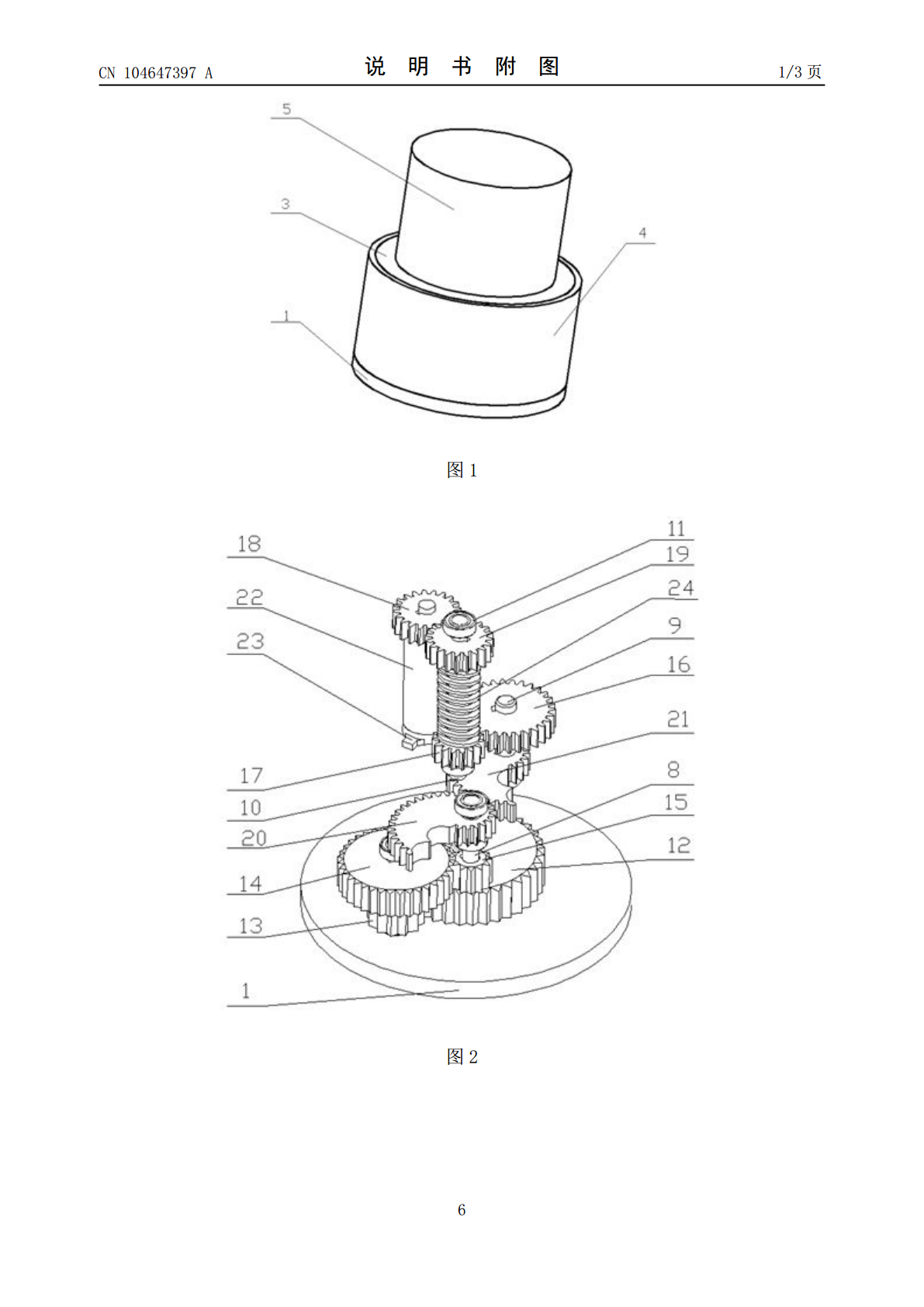
本发明公开一种可变刚度的柔性关节,该柔性关节包括下圆盘、中圆盘、上圆盘、外罩、调刚度外壳、主电机输入轴、从动轴、异形齿轮输入轴、从动异形齿轮输入轴、调刚度轴、轴承、一级输入齿轮、一级从动齿轮、二级输入齿轮、二级从动齿轮、三级输入齿轮、三级从动齿轮、调刚度输入齿轮、调刚度从动齿轮、主动异形齿轮、从动异形齿轮、调刚度直流电机、电机固定支架和扭簧;所述下圆盘、中圆盘与上圆盘与外罩固定连接;所述调刚度外壳与上圆盘固定连接;所述主电机输入轴与主电机同步旋转,并通过键与一级输入齿轮连接;所述一级从动齿轮与一级输入齿轮

一种基于贯通轴的可变刚度柔性关节.pdf
本发明公开了一种基于贯通轴的可变刚度柔性关节,解决了柔性关节刚度调节机构复杂、体积臃肿的问题,其技术方案要点是包括关节电机和可调刚度机构,所述的可调刚度机构包括刚度调节电机、驱动轴、刚度调节机构、弹性件和关节输出端,所述的关节电机设有用于容置所述驱动轴的贯通轴和用于输出关节电机力矩的电机输出端,所述刚度调节电机固定设于关节电机尾部外壳上,所述刚度调节机构设于关节输出端和电机输出端之间,所述驱动轴两端分别固定连接所述刚度调节电机和刚度调节机构,所述驱动轴与关节电机同轴,所述弹性件连接刚度调节机构和关节输出端
一种基于轴向力的可变刚度机构及柔性关节.pdf
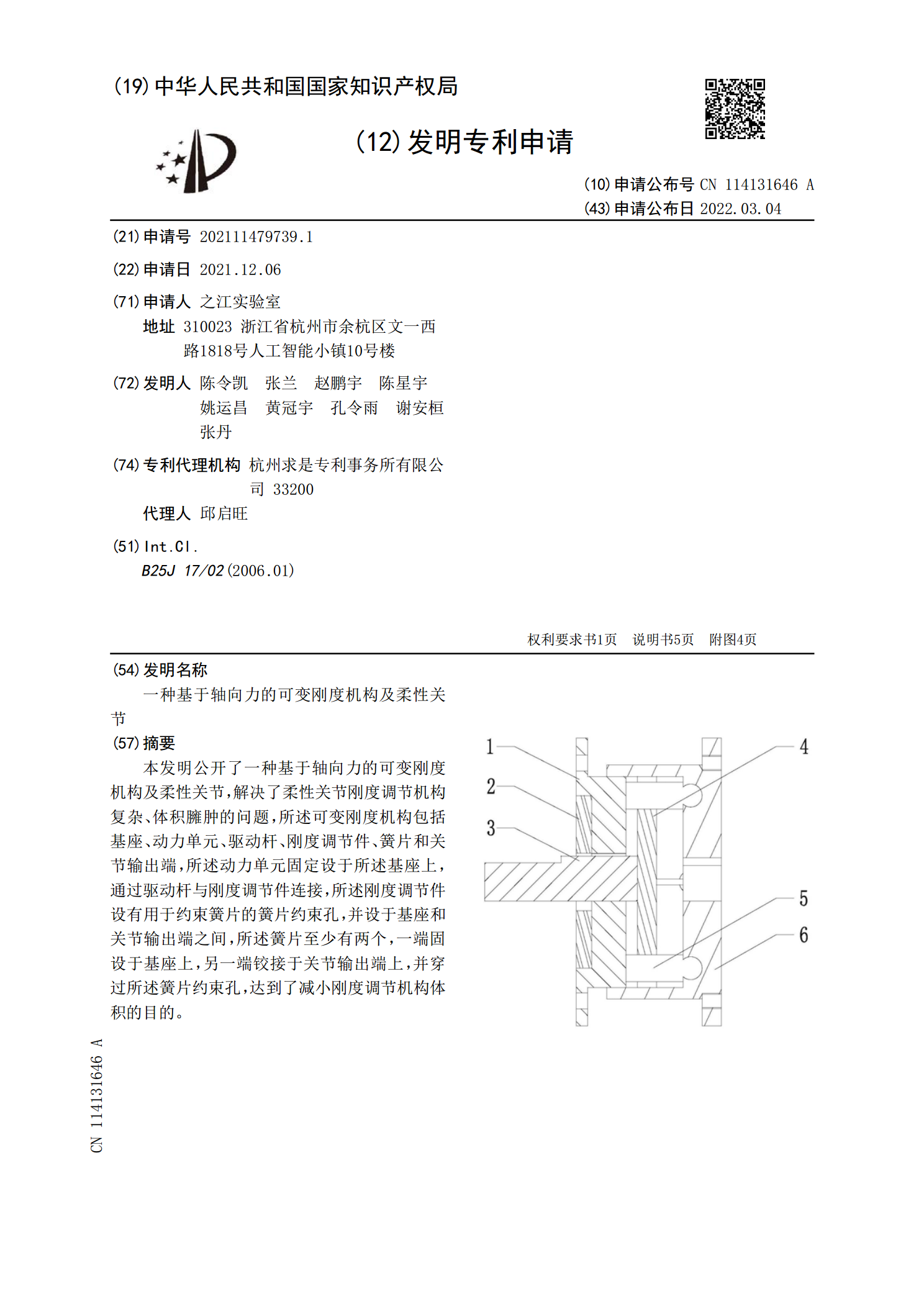
本发明公开了一种基于轴向力的可变刚度机构及柔性关节,解决了柔性关节刚度调节机构复杂、体积臃肿的问题,所述可变刚度机构包括基座、动力单元、驱动杆、刚度调节件、簧片和关节输出端,所述动力单元固定设于所述基座上,通过驱动杆与刚度调节件连接,所述刚度调节件设有用于约束簧片的簧片约束孔,并设于基座和关节输出端之间,所述簧片至少有两个,一端固设于基座上,另一端铰接于关节输出端上,并穿过所述簧片约束孔,达到了减小刚度调节机构体积的目的。

仿人机器人可变刚度柔性关节设计.pdf
本发明公开了一种仿人机器人可变刚度柔性关节,主要包括可变柔性关节驱动器、2D差分驱动关节机构。所述的可变柔性关节驱动器,主要包括微型驱动单元、电机支架、弹性单元。所述的2D差分驱动关节,主要包括柔索输入轮、输出轮、柔索。其特征在于:所述的可变刚度柔性关节驱动器,引入特殊弹性元件,刚性可变,以适应不同步行阶段关节刚度需要,并且能够存储/释放能量和吸收冲击;所述的可变柔性关节驱动器通过柔索与2-DOF差分驱动关节机构相连,无冗余驱动;采所述的2-DOF差分机构,采用柔索传动,较齿轮设计,结构简单,摩擦小,无回