
一种外骨骼机器人及其膝关节部件.pdf

朋兴****en

1/10
2/10
3/10

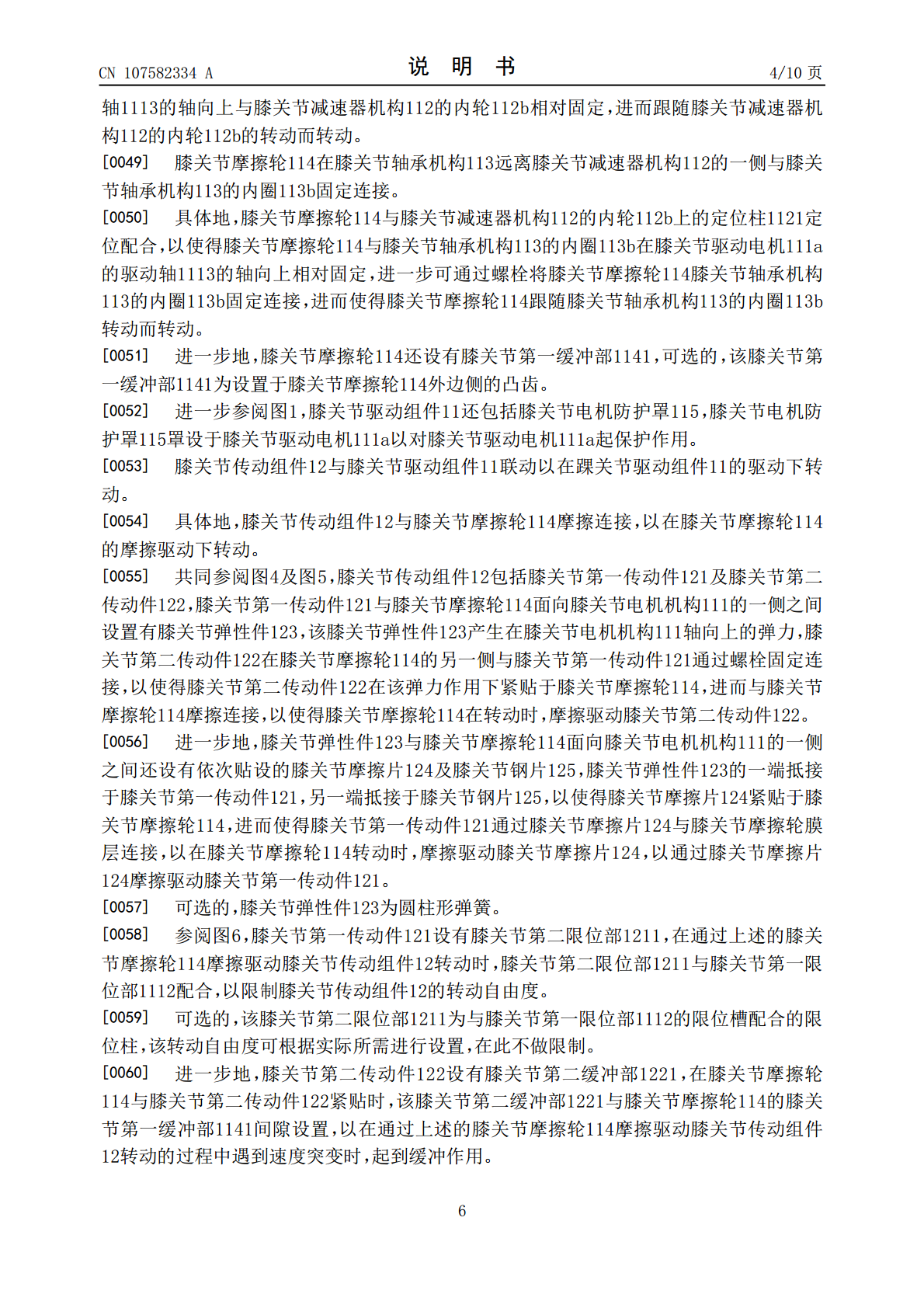
4/10
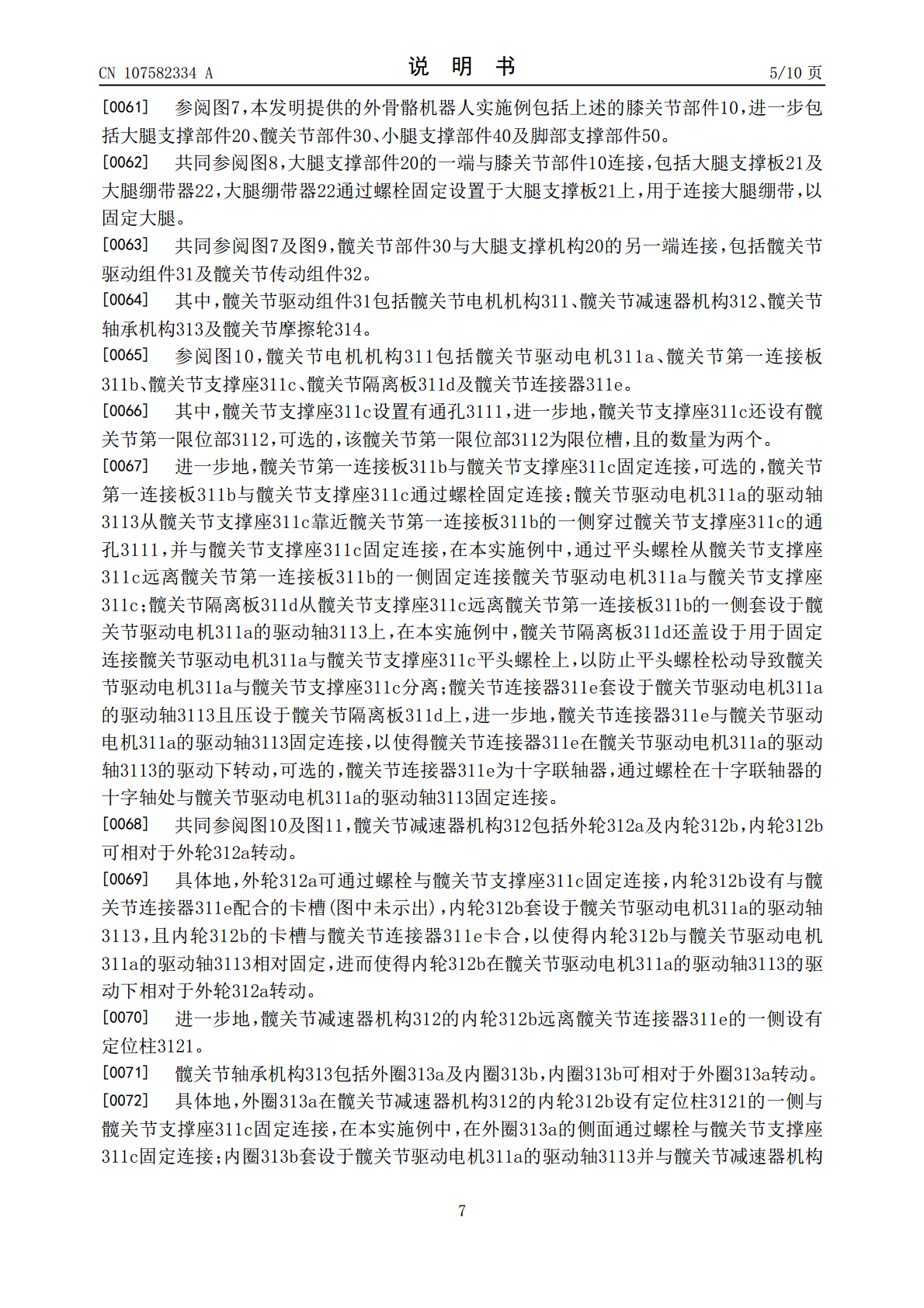
5/10
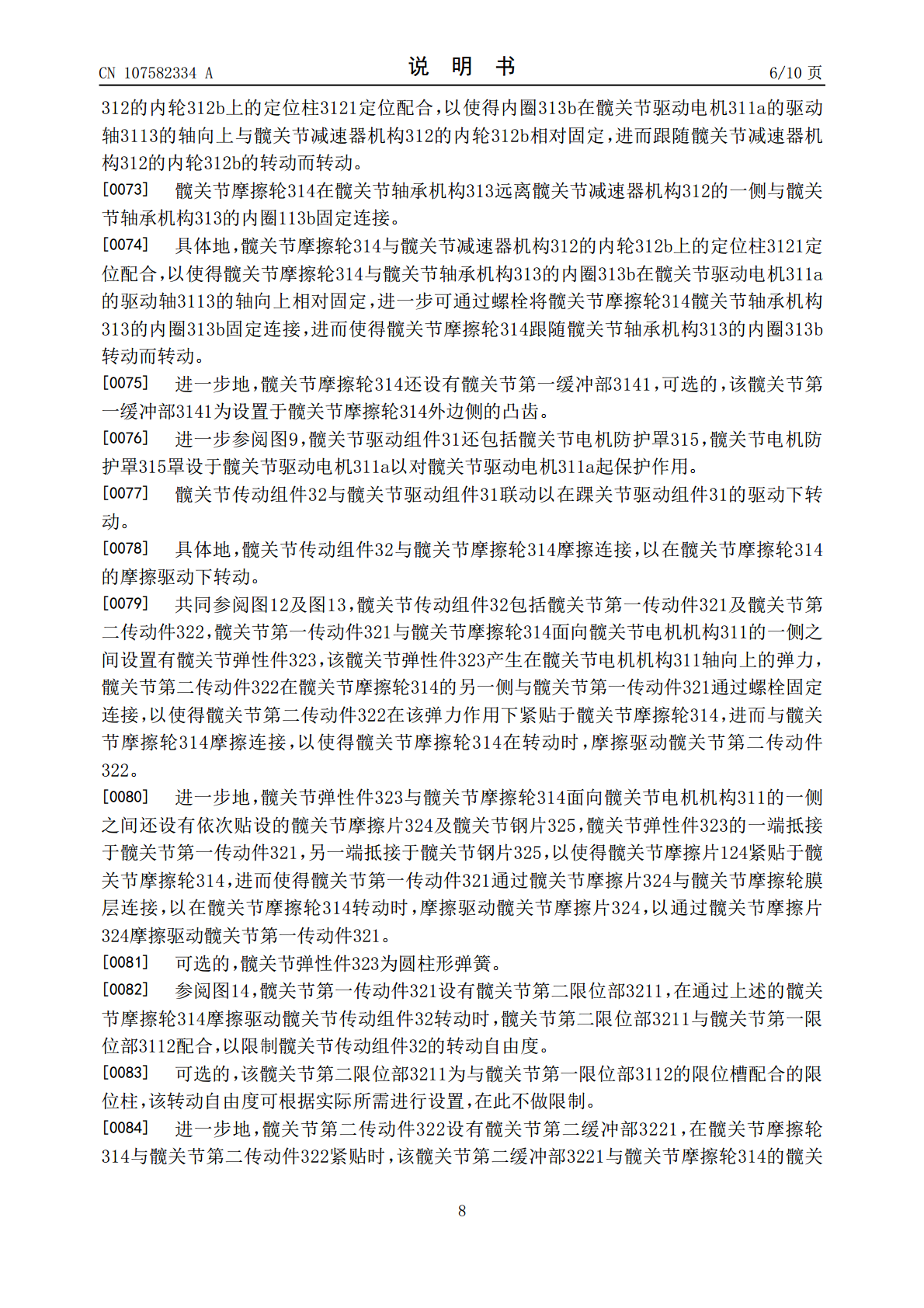
6/10
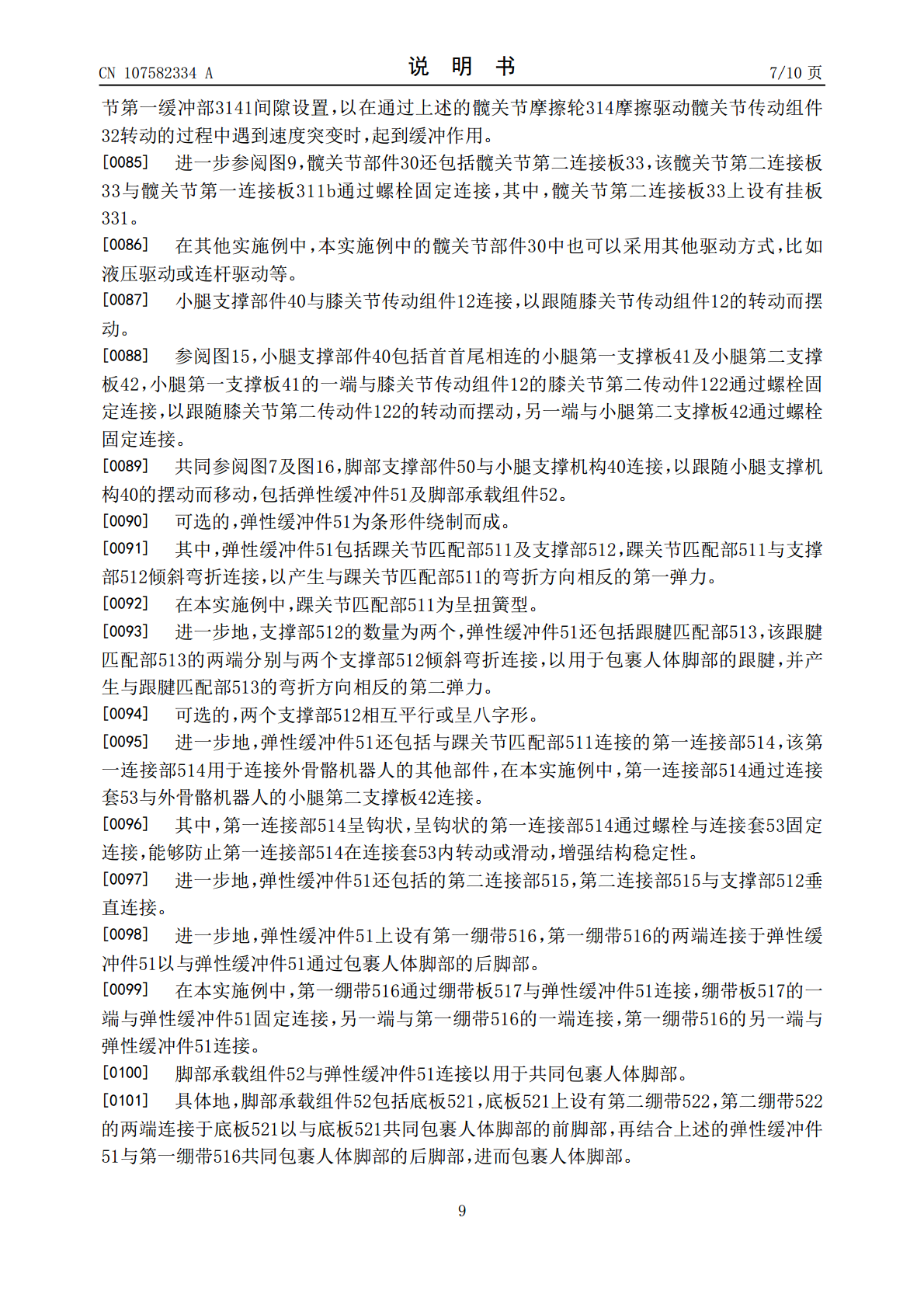
7/10
8/10
9/10

10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种外骨骼机器人及其膝关节部件.pdf
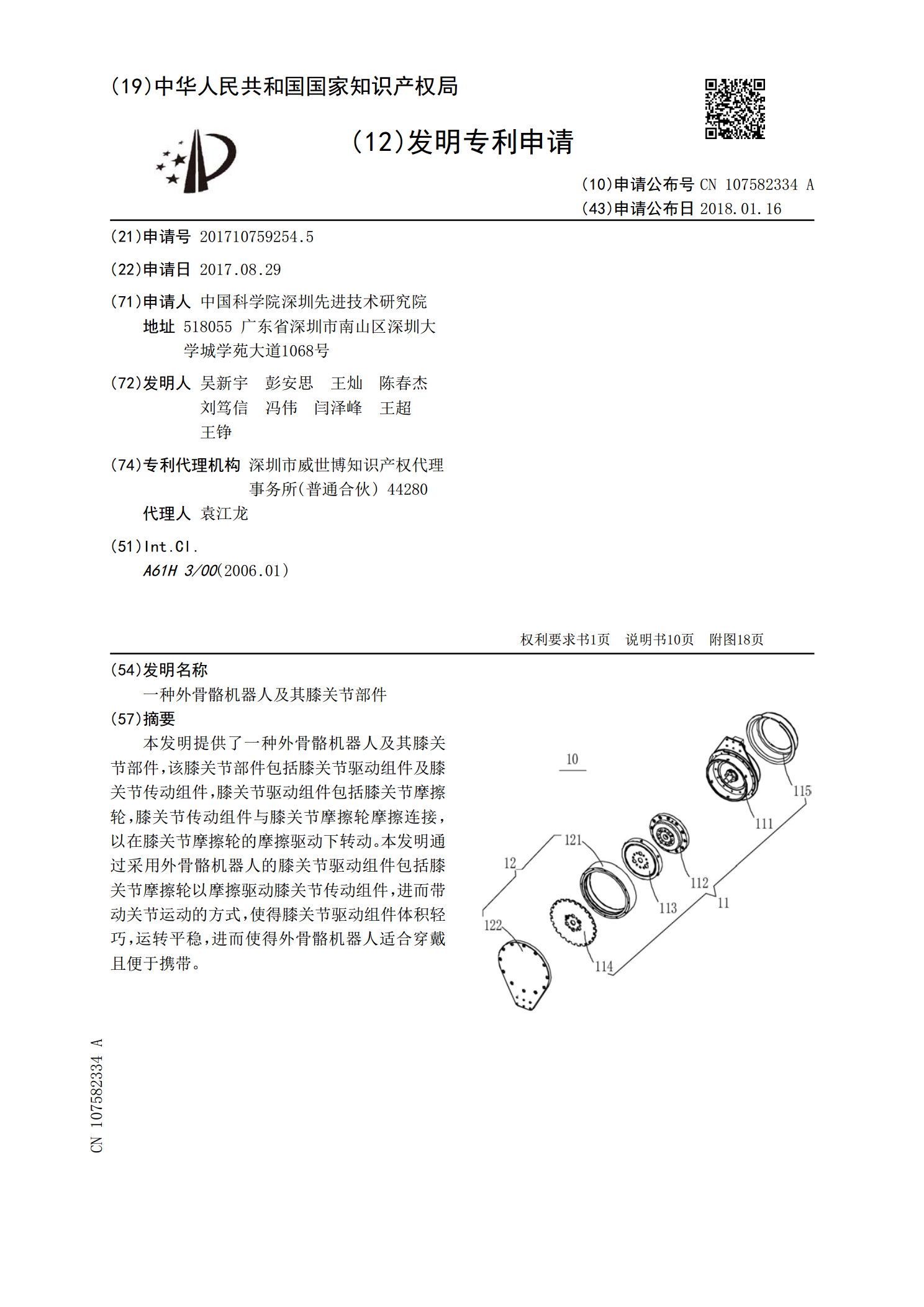
本发明提供了一种外骨骼机器人及其膝关节部件,该膝关节部件包括膝关节驱动组件及膝关节传动组件,膝关节驱动组件包括膝关节摩擦轮,膝关节传动组件与膝关节摩擦轮摩擦连接,以在膝关节摩擦轮的摩擦驱动下转动。本发明通过采用外骨骼机器人的膝关节驱动组件包括膝关节摩擦轮以摩擦驱动膝关节传动组件,进而带动关节运动的方式,使得膝关节驱动组件体积轻巧,运转平稳,进而使得外骨骼机器人适合穿戴且便于携带。
一种外骨骼机器人及其髋关节部件.pdf
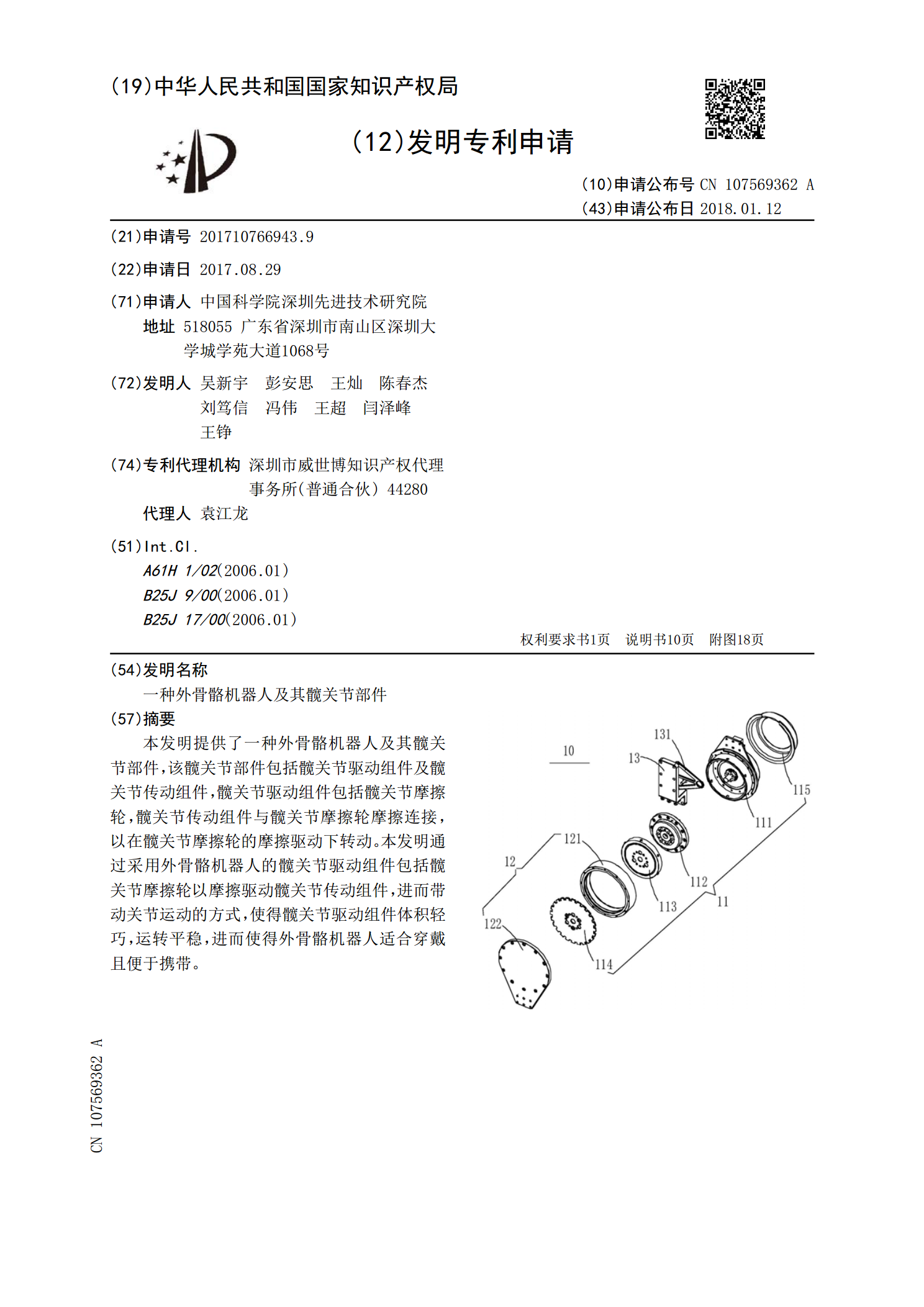
本发明提供了一种外骨骼机器人及其髋关节部件,该髋关节部件包括髋关节驱动组件及髋关节传动组件,髋关节驱动组件包括髋关节摩擦轮,髋关节传动组件与髋关节摩擦轮摩擦连接,以在髋关节摩擦轮的摩擦驱动下转动。本发明通过采用外骨骼机器人的髋关节驱动组件包括髋关节摩擦轮以摩擦驱动髋关节传动组件,进而带动关节运动的方式,使得髋关节驱动组件体积轻巧,运转平稳,进而使得外骨骼机器人适合穿戴且便于携带。
一种欠驱动膝关节外骨骼机器人.pdf
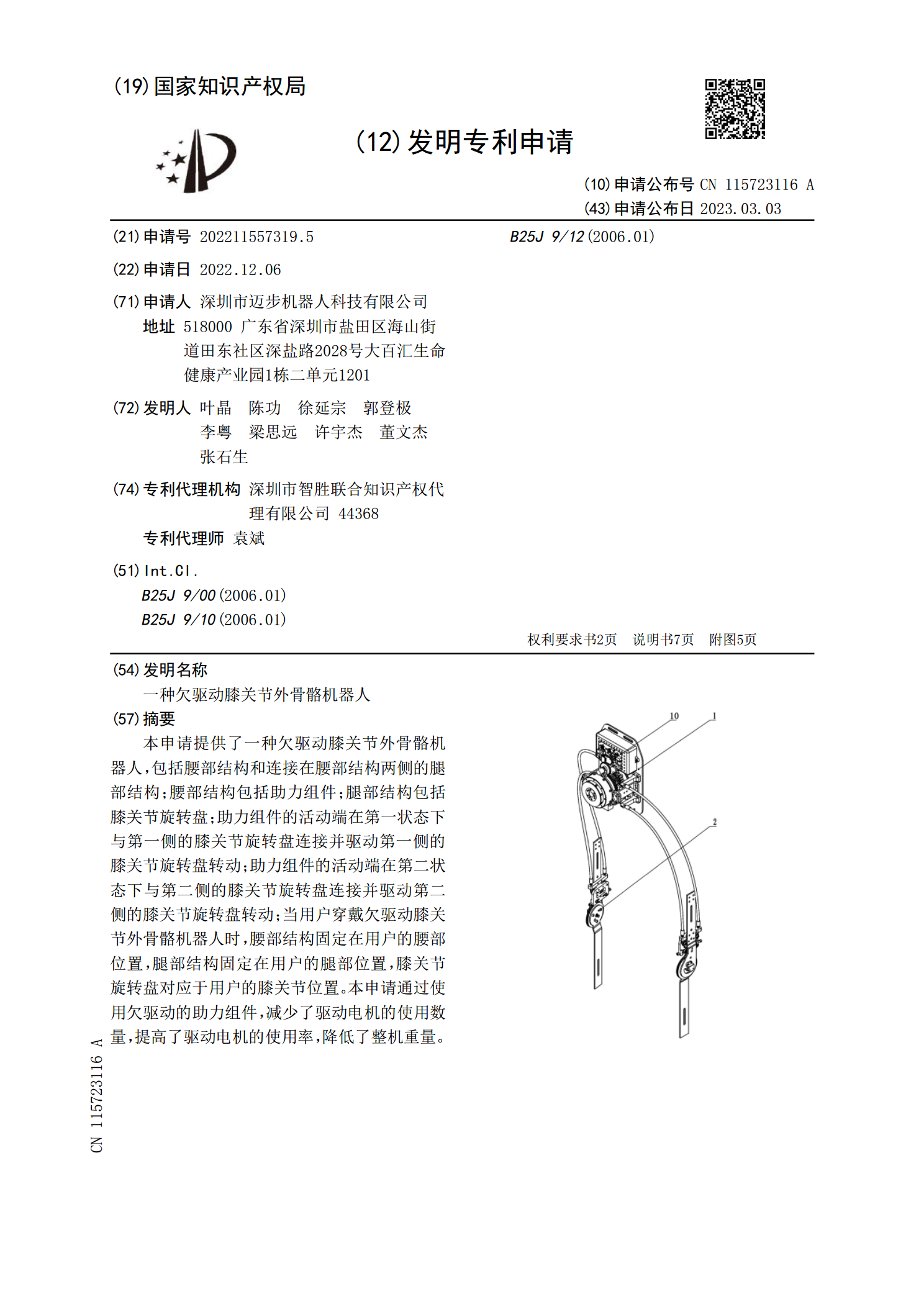
本申请提供了一种欠驱动膝关节外骨骼机器人,包括腰部结构和连接在腰部结构两侧的腿部结构;腰部结构包括助力组件;腿部结构包括膝关节旋转盘;助力组件的活动端在第一状态下与第一侧的膝关节旋转盘连接并驱动第一侧的膝关节旋转盘转动;助力组件的活动端在第二状态下与第二侧的膝关节旋转盘连接并驱动第二侧的膝关节旋转盘转动;当用户穿戴欠驱动膝关节外骨骼机器人时,腰部结构固定在用户的腰部位置,腿部结构固定在用户的腿部位置,膝关节旋转盘对应于用户的膝关节位置。本申请通过使用欠驱动的助力组件,减少了驱动电机的使用数量,提高了驱动电
一种无动力膝关节弹力支承外骨骼及外骨骼机器人.pdf
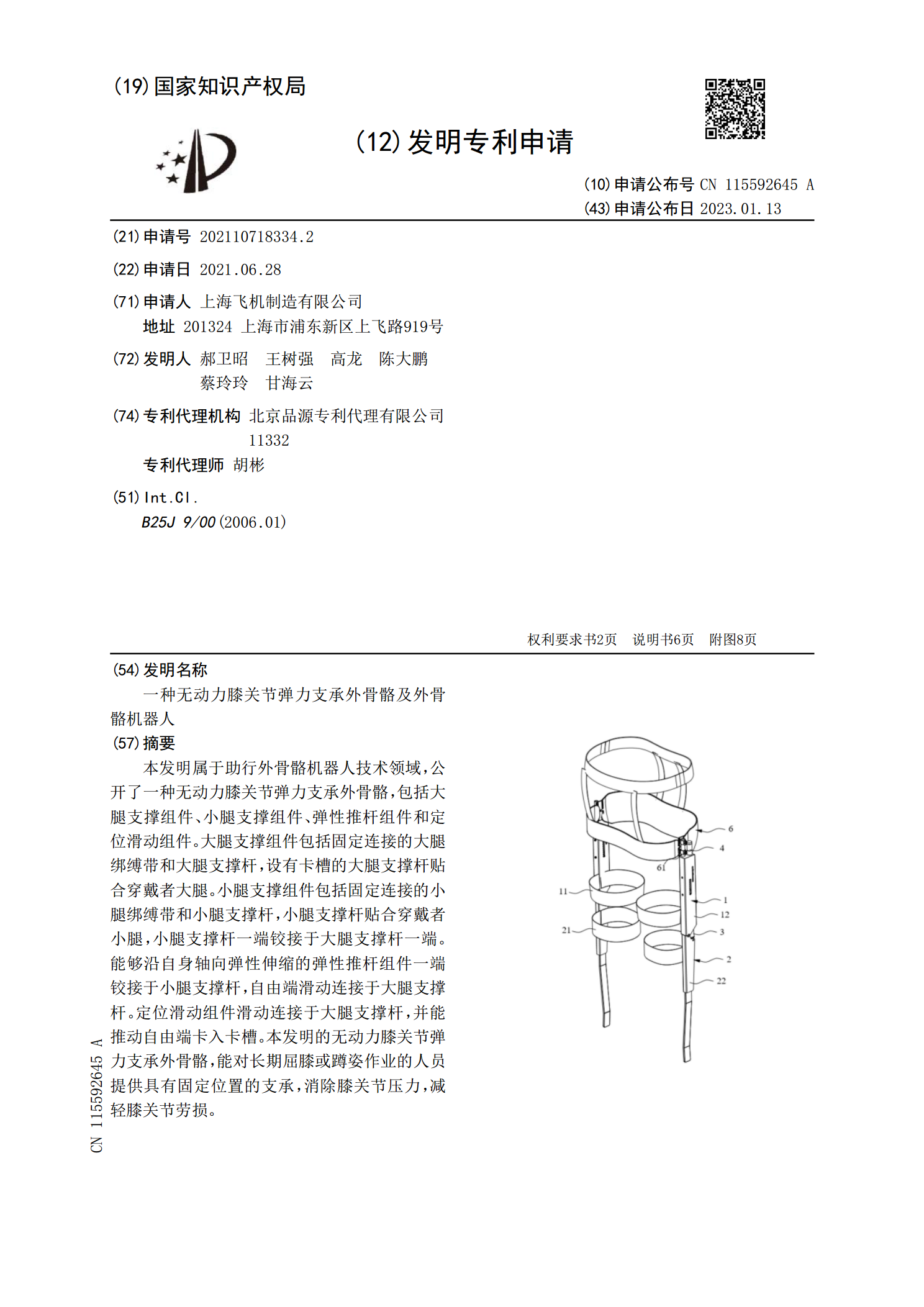
本发明属于助行外骨骼机器人技术领域,公开了一种无动力膝关节弹力支承外骨骼,包括大腿支撑组件、小腿支撑组件、弹性推杆组件和定位滑动组件。大腿支撑组件包括固定连接的大腿绑缚带和大腿支撑杆,设有卡槽的大腿支撑杆贴合穿戴者大腿。小腿支撑组件包括固定连接的小腿绑缚带和小腿支撑杆,小腿支撑杆贴合穿戴者小腿,小腿支撑杆一端铰接于大腿支撑杆一端。能够沿自身轴向弹性伸缩的弹性推杆组件一端铰接于小腿支撑杆,自由端滑动连接于大腿支撑杆。定位滑动组件滑动连接于大腿支撑杆,并能推动自由端卡入卡槽。本发明的无动力膝关节弹力支承外骨骼

外骨骼机器人膝关节设计与控制.docx
外骨骼机器人膝关节设计与控制外骨骼机器人膝关节设计与控制摘要:随着现代科技的不断发展,外骨骼机器人在康复治疗、助行辅助等领域得到了广泛应用。膝关节作为人体重要的关节之一,在外骨骼机器人设计中起着关键的作用。本论文对外骨骼机器人膝关节的设计与控制进行了分析与研究,旨在提高其稳定性、适应性和安全性,为康复治疗和助行辅助提供更好的支持。第一章引言外骨骼机器人作为一种新型的医疗器械,其主要功能是为行动受限患者提供康复治疗和助行辅助。外骨骼机器人作为一体化的机械装置,需要对膝关节进行合理的设计与控制。本章将介绍外骨