
一种谐振腔轴向电场测量装置以及测量方法.pdf

一只****懿呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种谐振腔轴向电场测量装置以及测量方法.pdf
本发明公开了一种谐振腔轴向电场测量装置以及测量方法,该装置包括机械结构部分和测量控制部分,机械结构部分包括主体框架、滑轮、驱动结构、牵引线以及微扰体,测量控制部分包括激励模块、环境监测模块以及分析模块,微扰体位于处于竖直状态的牵引线上,通过滑轮驱动牵引线移动,保证微扰体在被测谐振腔的中心线上移动,通过激励模块向被测谐振腔发射激励信号,并采集微扰体位于不同位置时反馈信号,获得微扰体位于不同位置时谐振腔的谐振频率,根据微扰体位于不同位置时谐振腔的谐振频率和当前环境下谐振腔的谐振频率获得当前位置的谐振腔电场强度
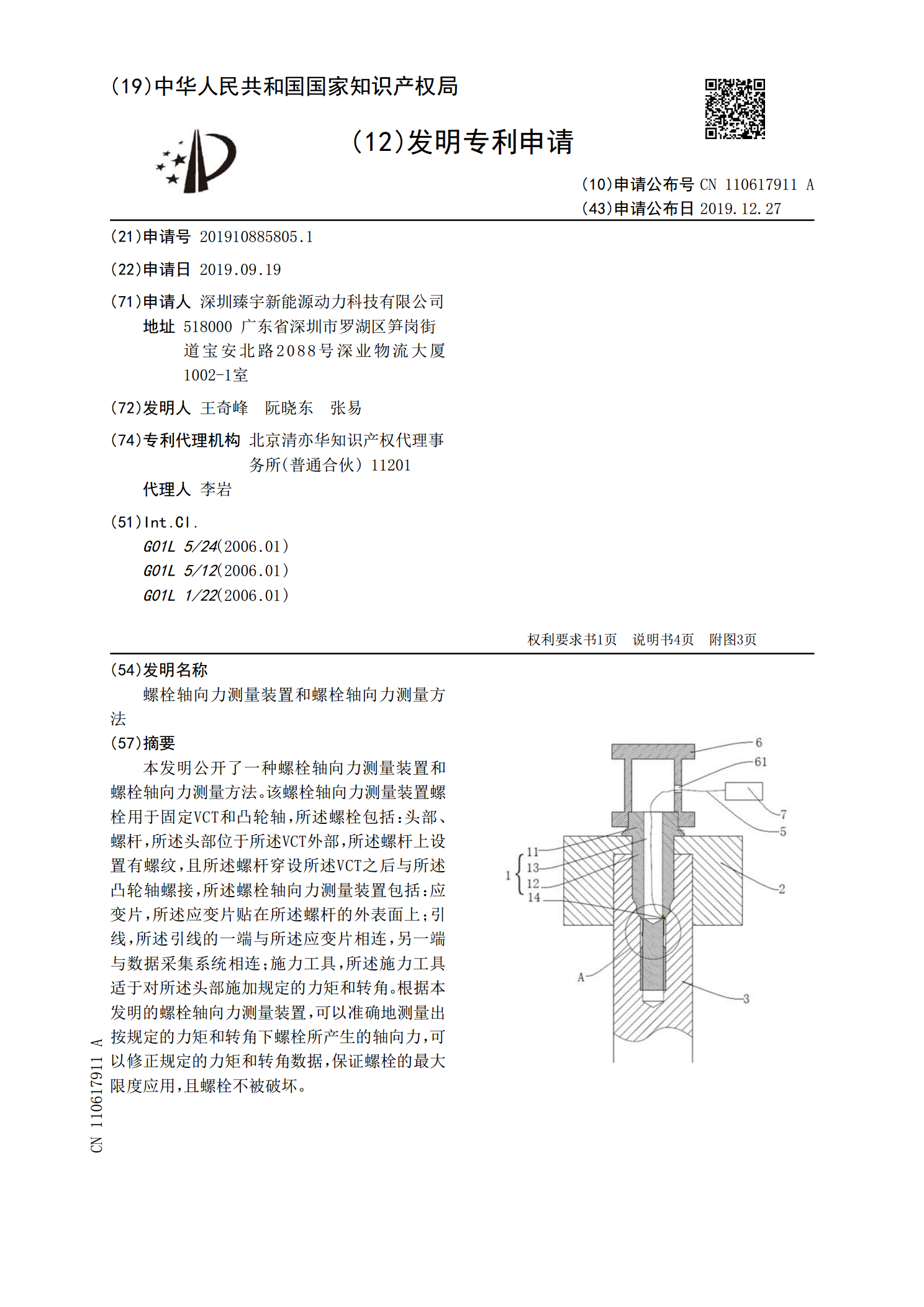
螺栓轴向力测量装置和螺栓轴向力测量方法.pdf
本发明公开了一种螺栓轴向力测量装置和螺栓轴向力测量方法。该螺栓轴向力测量装置螺栓用于固定VCT和凸轮轴,所述螺栓包括:头部、螺杆,所述头部位于所述VCT外部,所述螺杆上设置有螺纹,且所述螺杆穿设所述VCT之后与所述凸轮轴螺接,所述螺栓轴向力测量装置包括:应变片,所述应变片贴在所述螺杆的外表面上;引线,所述引线的一端与所述应变片相连,另一端与数据采集系统相连;施力工具,所述施力工具适于对所述头部施加规定的力矩和转角。根据本发明的螺栓轴向力测量装置,可以准确地测量出按规定的力矩和转角下螺栓所产生的轴向力,可以

测量方法以及测量装置.pdf
本发明的测量方法以及测量装置的特征在于,测量部(301)对基准轮胎反复执行获取一条线的测量数据的测量处理,从而获取多条线的测量数据。第一获取部(311)根据由测量部(301)测量出的多个测量数据中的各个测量数据来生成一条线的高度数据,将生成的多个一维高度数据排列为矩阵状,生成测量面的二维高度数据,并且生成基准形状数据。第二获取部(314)根据相对于对象轮胎而由测量部(301)测量出的一条线的形状数据来获取对象一维高度数据。去除部(315)比较对象一维高度数据和副扫描方向的位置与对象一维高度数据相同的基准形
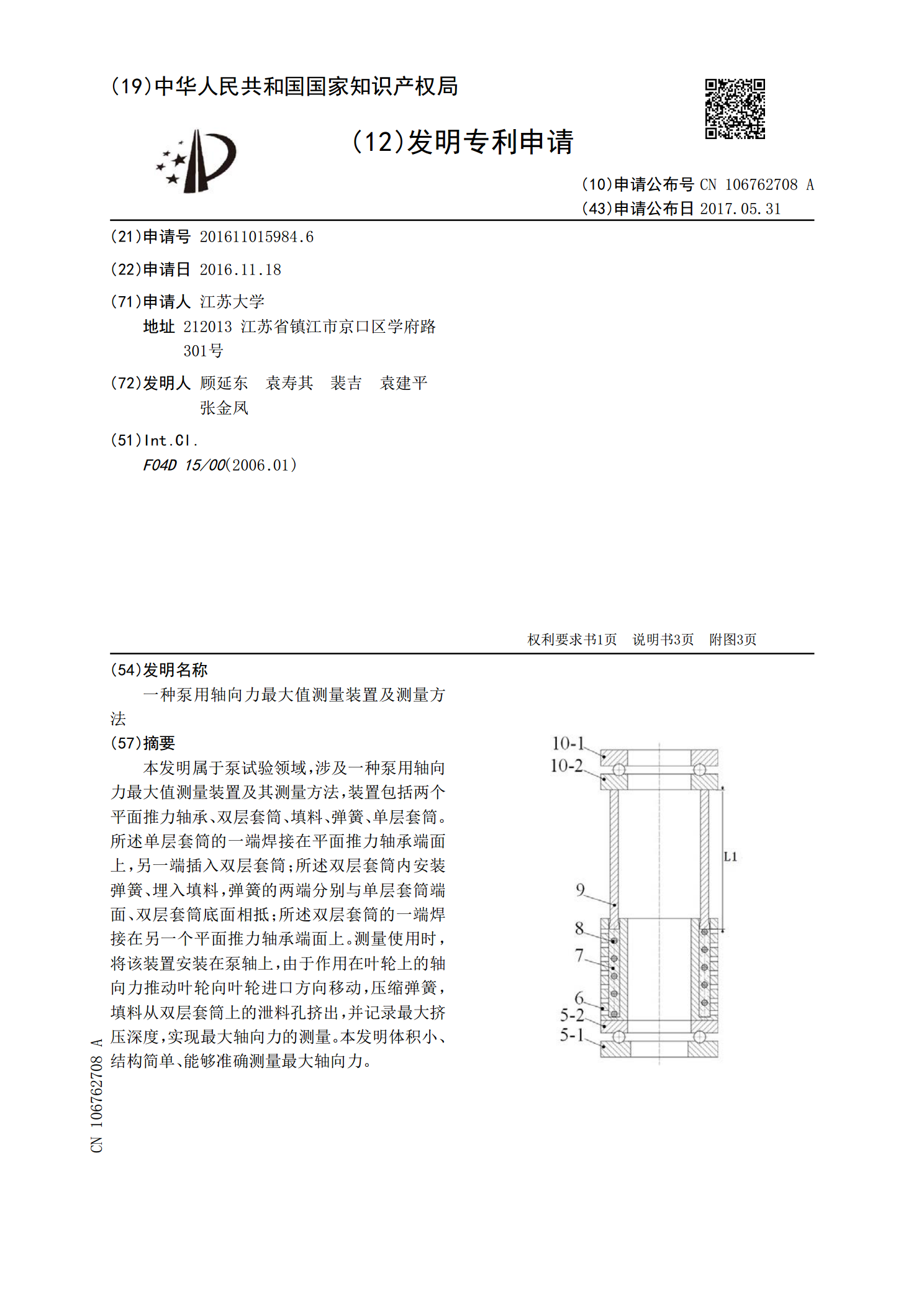
一种泵用轴向力最大值测量装置及测量方法.pdf
本发明属于泵试验领域,涉及一种泵用轴向力最大值测量装置及其测量方法,装置包括两个平面推力轴承、双层套筒、填料、弹簧、单层套筒。所述单层套筒的一端焊接在平面推力轴承端面上,另一端插入双层套筒;所述双层套筒内安装弹簧、埋入填料,弹簧的两端分别与单层套筒端面、双层套筒底面相抵;所述双层套筒的一端焊接在另一个平面推力轴承端面上。测量使用时,将该装置安装在泵轴上,由于作用在叶轮上的轴向力推动叶轮向叶轮进口方向移动,压缩弹簧,填料从双层套筒上的泄料孔挤出,并记录最大挤压深度,实现最大轴向力的测量。本发明体积小、结构简
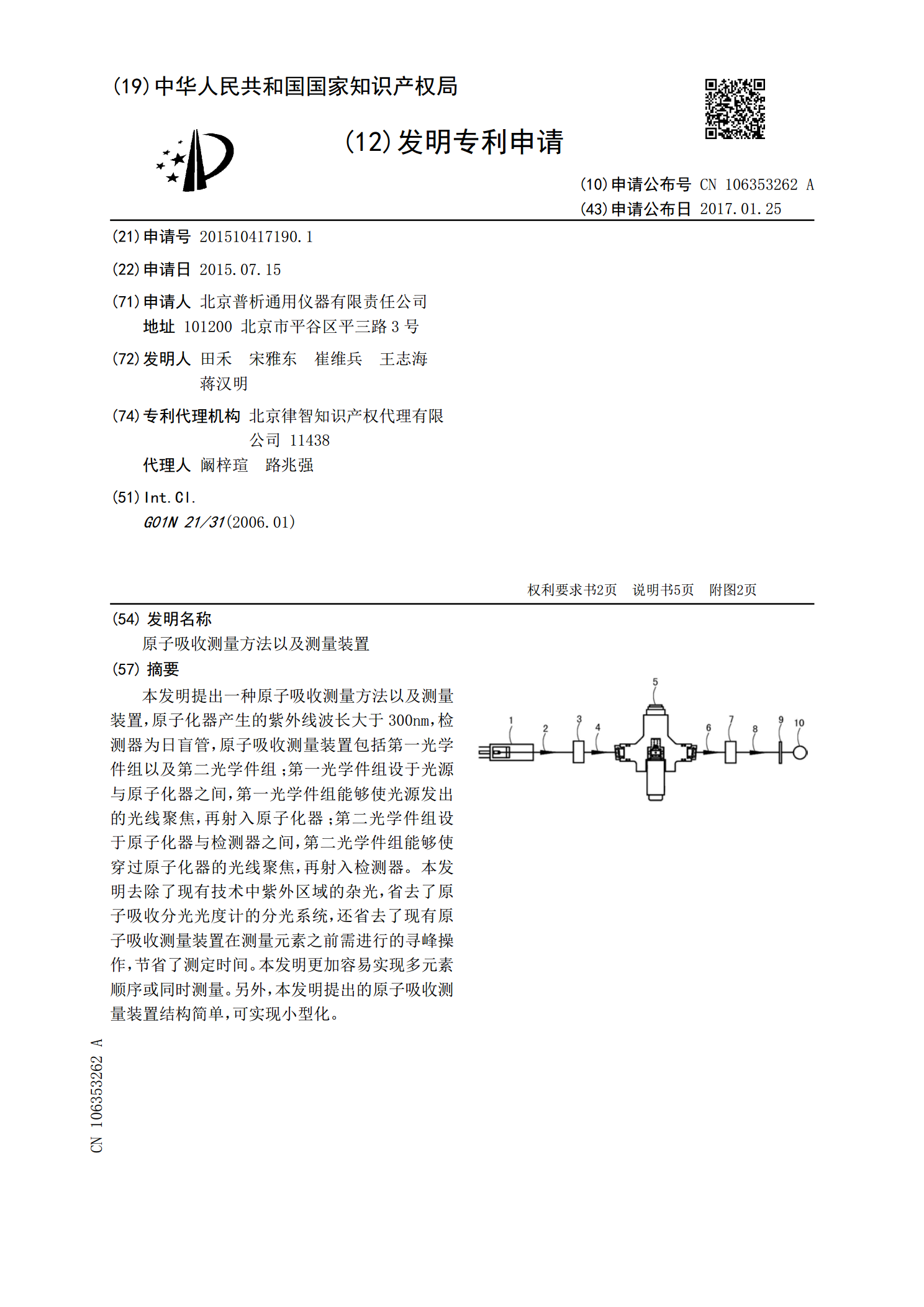
原子吸收测量方法以及测量装置.pdf
本发明提出一种原子吸收测量方法以及测量装置,原子化器产生的紫外线波长大于300nm,检测器为日盲管,原子吸收测量装置包括第一光学件组以及第二光学件组;第一光学件组设于光源与原子化器之间,第一光学件组能够使光源发出的光线聚焦,再射入原子化器;第二光学件组设于原子化器与检测器之间,第二光学件组能够使穿过原子化器的光线聚焦,再射入检测器。本发明去除了现有技术中紫外区域的杂光,省去了原子吸收分光光度计的分光系统,还省去了现有原子吸收测量装置在测量元素之前需进行的寻峰操作,节省了测定时间。本发明更加容易实现多元素顺