
一种电动轮椅机械臂装置.pdf

婀娜****aj


1/8

2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种电动轮椅机械臂装置.pdf
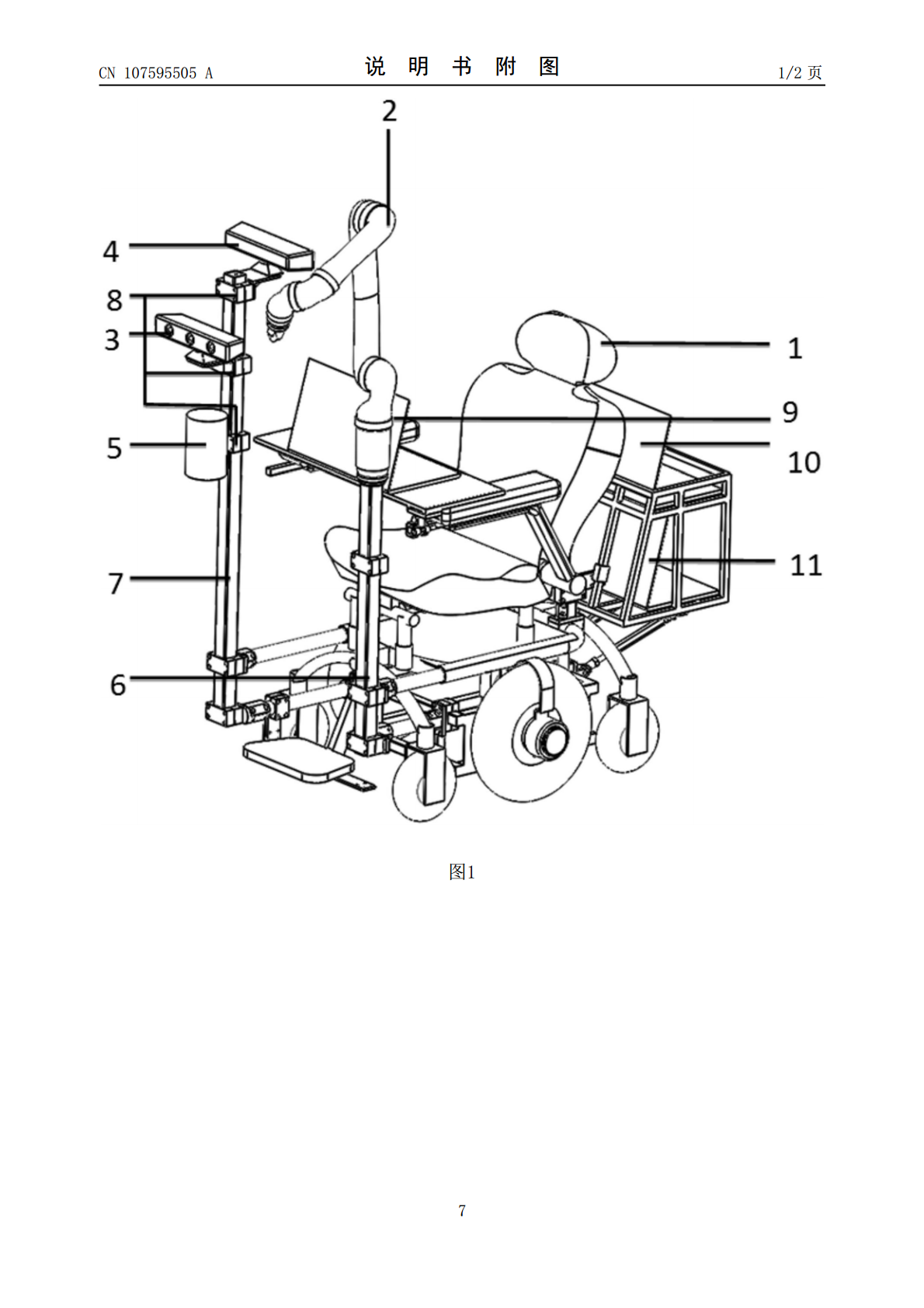
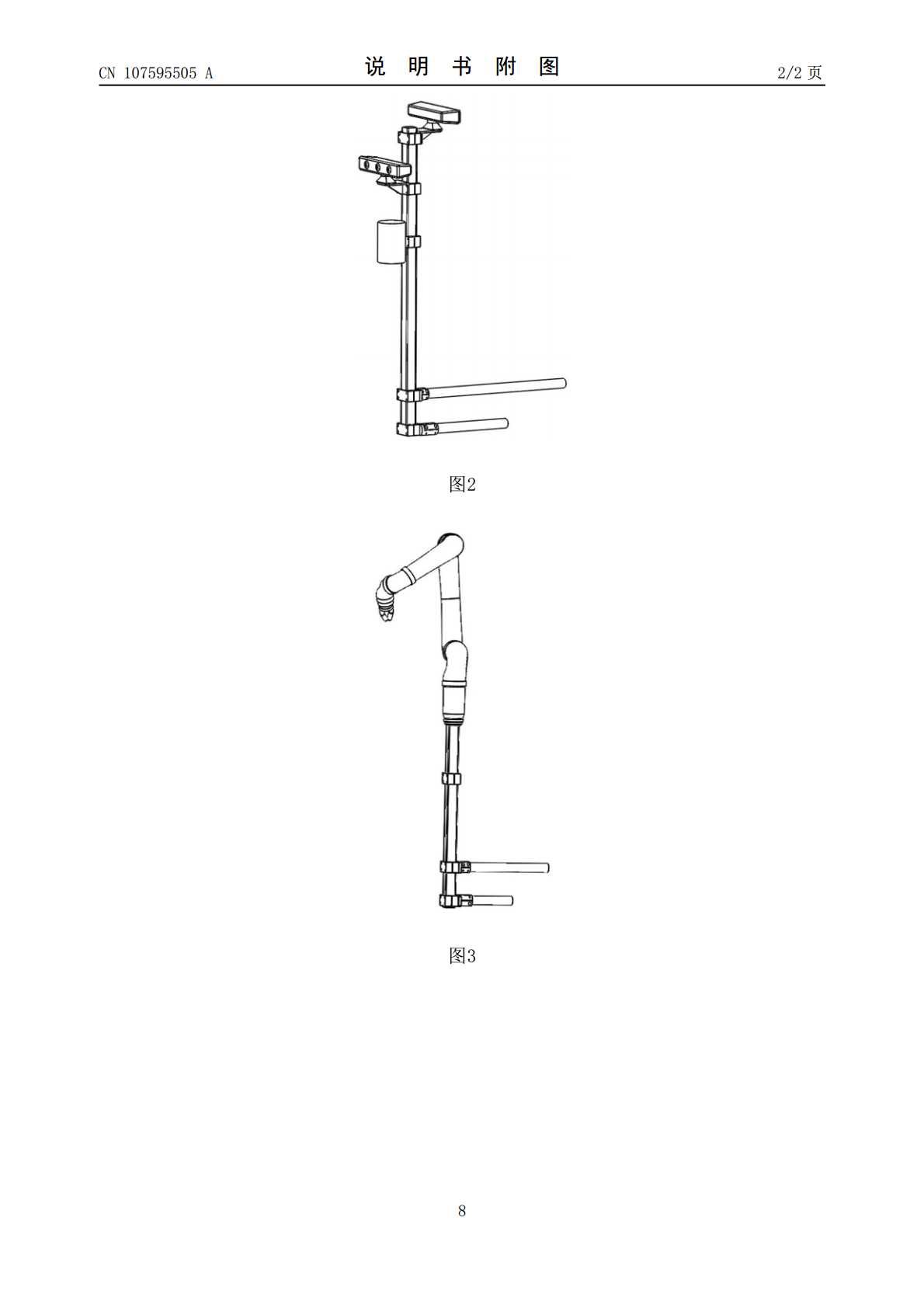
本发明公开了一种电动轮椅机械臂装置,包括电动轮椅、六自由度轻量型仿生机械臂、第一3D体感摄影机、第二3D体感摄影机、激光雷达、左侧面支架、右侧面支架、第一PC机、第二PC机、第三PC机,所述六自由度轻量型仿生机械臂固定在电动轮椅的左前方;所述激光雷达、第一3D体感摄影机和第二3D体感摄影机设置在电动轮椅的右前方;所述第一PC机用于控制六自由度轻量型仿生机械臂,所述第二PC机和第三PC机分别用于处理各体感摄影机传输的视觉信号。本发明结合轮椅的地面移动能力、激光雷达定位能力、3D体感摄影机的识别能力以及机械臂

带有康复机械臂的电动轮椅装置.pdf
一种康复工程技术领域的带有康复机械臂的电动轮椅装置,包括:电动轮椅、控制驱动机构、安装架和机械臂,安装架设置于电动轮椅的后部,机械臂和安装架相连,控制驱动机构设于电动轮椅的底部,控制驱动机构分别与电动轮椅、安装架和机械臂相连以输出控制驱动信号。被动训练模式下,由电机输出驱动力矩,带动患者患肢模拟完成一些日常动作,主要用于患者恢复初期;主动训练模式下,患者依靠自身力量实现上肢各关节运动,机械臂在跟随运动中对上肢运动参数进行监测,对患者起到一定保护作用,主要用于恢复训练后期;辅助训练模式通过患肢动作分析预测患

一种电动轮椅装置.pdf
本发明公开了一种电动轮椅装置,包括:车架单元,其包括车架本体、车把、车杆和车轮;车架本体上设置有拉手;车架本体的一端设置有车杆,车架本体的另一端设置有定位销;定位销的下方设置有连接器前盖,连接器前盖内设置有拉杆销;车把设置在车杆的顶端,车轮设置在车杆的底端;连接单元,其包括连接杆、连接器后盖和连接件;连接器后盖设置在连接杆的一端,连接件设置在连接杆的另一端;连接器后盖上设置有与定位销形状相适配的通孔;连接器后盖的下方设置有固定块,固定块内设置有定位槽,固定块的底部设置有固定孔;及驱动单元,其包括电池和控制

一种机械臂可拆卸的轮椅.pdf
一种机械臂可拆卸的轮椅,涉及一轮椅,机械臂(1)包括机械手(26)、腕关节旋转电机、小臂(27)、肘关节蜗轮(28)、肘关节俯仰电机(29)、肘关节蜗杆(30)、上臂(31)、肩关节蜗轮(32)、肩关节俯仰电机(33)、肩关节蜗杆(34)和前臂(35);腰关节电机与基座(3)的一端固定连接;基座(3)的另一端与安装架(4)转动连接,安装架(4)与轮椅本体(5)的扶手(8)固定连接;本发明机械手抓取物体简单、定位精度高,不用时,拨出机械臂和基座,可将此部分另行放置,此时剩余在轮椅上的安装座部分体积小,不占用
一种电动轮椅粪便清理装置.pdf
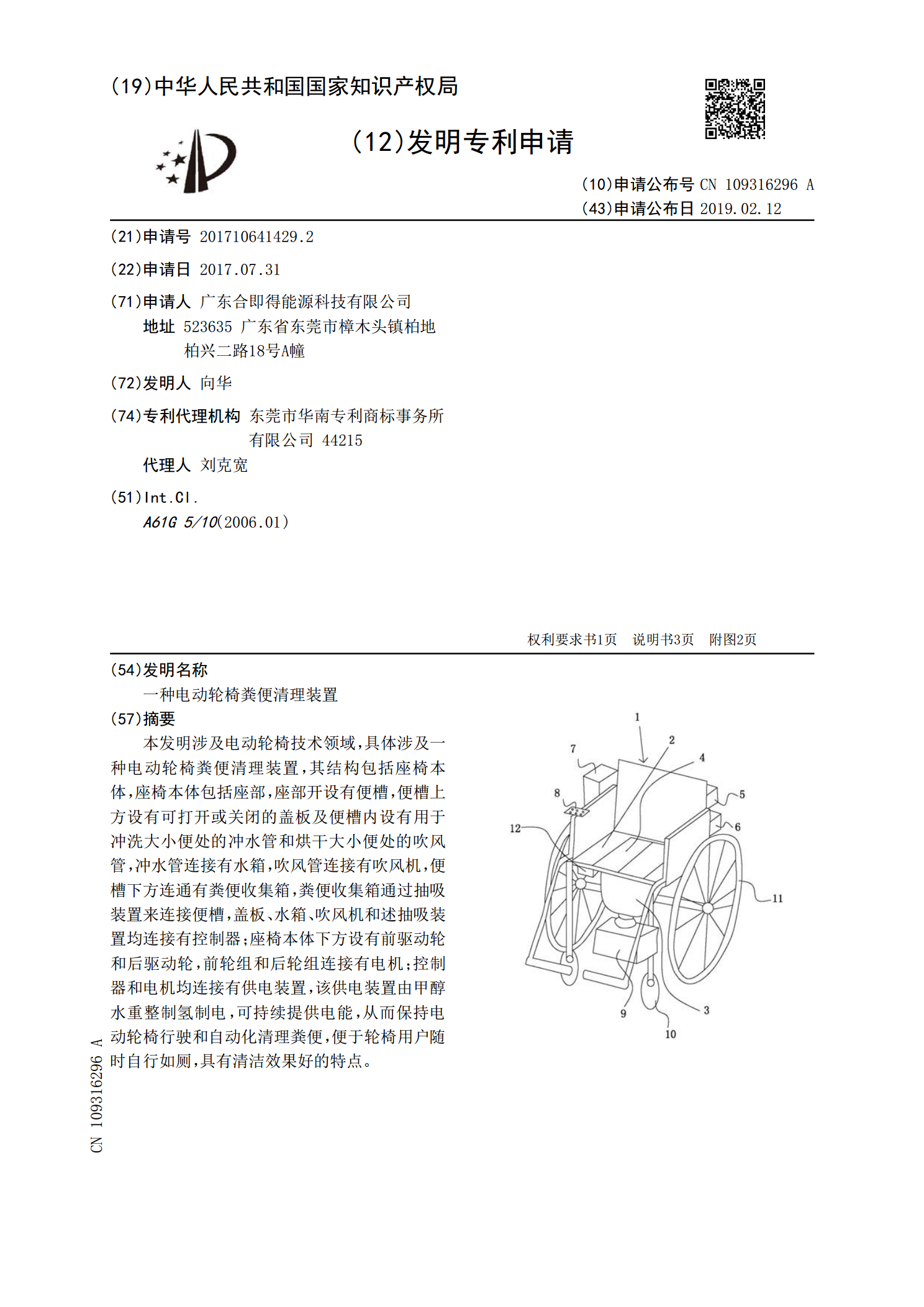
本发明涉及电动轮椅技术领域,具体涉及一种电动轮椅粪便清理装置,其结构包括座椅本体,座椅本体包括座部,座部开设有便槽,便槽上方设有可打开或关闭的盖板及便槽内设有用于冲洗大小便处的冲水管和烘干大小便处的吹风管,冲水管连接有水箱,吹风管连接有吹风机,便槽下方连通有粪便收集箱,粪便收集箱通过抽吸装置来连接便槽,盖板、水箱、吹风机和述抽吸装置均连接有控制器;座椅本体下方设有前驱动轮和后驱动轮,前轮组和后轮组连接有电机;控制器和电机均连接有供电装置,该供电装置由甲醇水重整制氢制电,可持续提供电能,从而保持电动轮椅行驶