
一种具有防震功能的四轮独立驱动移动机器人.pdf

元容****少女


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种具有防震功能的四轮独立驱动移动机器人.pdf
本发明公开了一种具有防震功能的四轮独立驱动移动机器人,包括控制器、底盘和安装在底盘上的至少四个滚轮组件;底盘用于承载待运输的货物或者安装其他设备;滚轮组件包括滚轮、支架、驱动电机、液压缸和转向电机,驱动电机和滚轮电机均安装在支架上,驱动电机驱动滚轮旋转;支架通过液压缸安装在底盘下方,转向电机安装在底盘上,转向电机能够驱动支架围绕液压缸的中轴线旋转;控制器控制驱动电机、转向电机和液压缸的液压泵。本发明的移动机器人使用专门的电机驱动每个滚轮的旋转和转向,使得移动机器人的运动更为灵活,控制器对移动机器人的控制更
一种具有防震功能的移动机器人.pdf
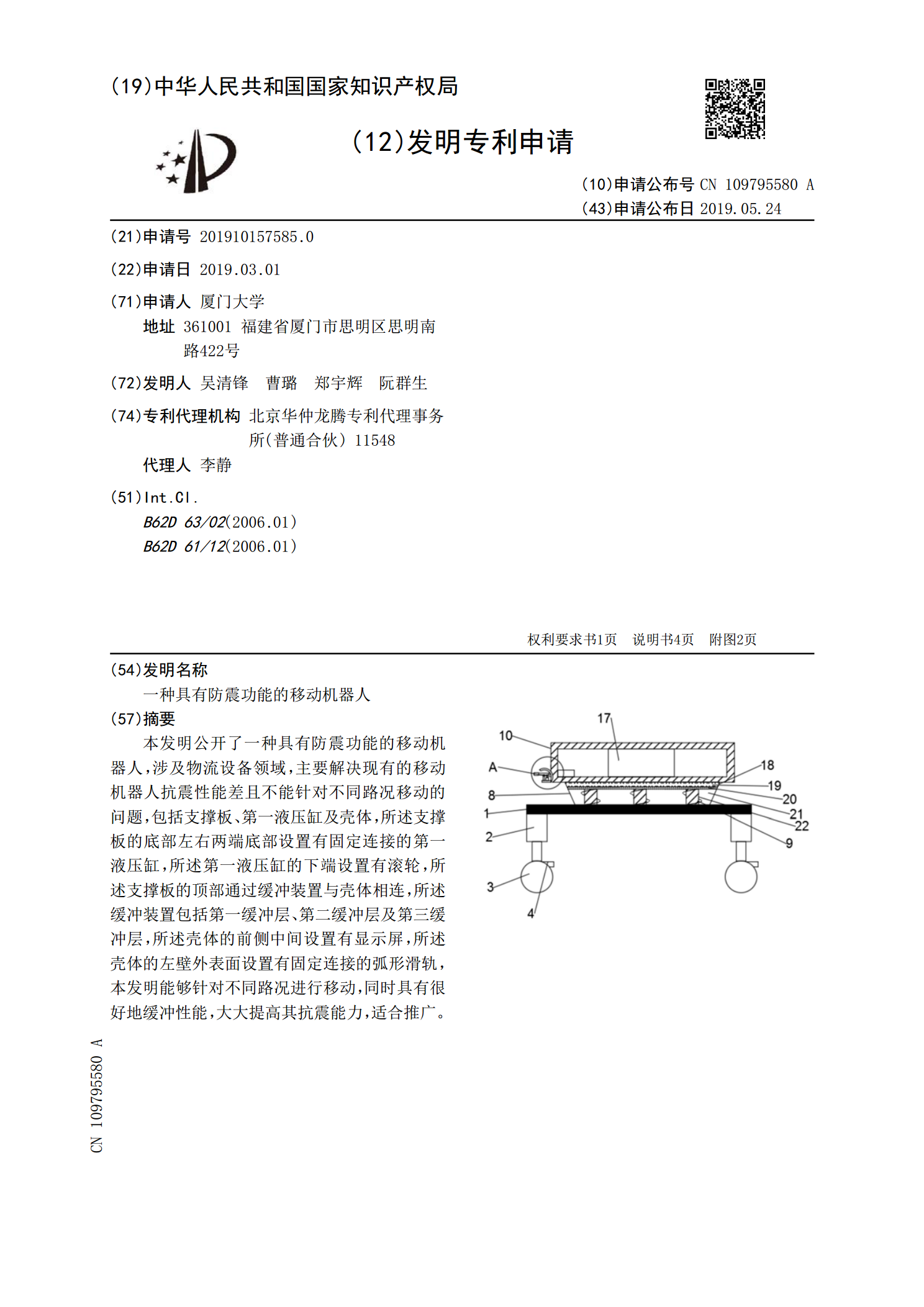
本发明公开了一种具有防震功能的移动机器人,涉及物流设备领域,主要解决现有的移动机器人抗震性能差且不能针对不同路况移动的问题,包括支撑板、第一液压缸及壳体,所述支撑板的底部左右两端底部设置有固定连接的第一液压缸,所述第一液压缸的下端设置有滚轮,所述支撑板的顶部通过缓冲装置与壳体相连,所述缓冲装置包括第一缓冲层、第二缓冲层及第三缓冲层,所述壳体的前侧中间设置有显示屏,所述壳体的左壁外表面设置有固定连接的弧形滑轨,本发明能够针对不同路况进行移动,同时具有很好地缓冲性能,大大提高其抗震能力,适合推广。

一种具有独立驱动功能的电梯门锁装置及其锁解方法.pdf
本发明公开了一种具有独立驱动功能的电梯门锁装置及其锁解方法。现有电梯门锁锁紧对于电梯门锁使用中门锁锁紧有效性降低时的补偿能力差。本发明的电机驱动偏心轮轴;偏心轮和飞轮均固定在偏心轮轴上;动锁臂与锁臂架铰接;动锁臂设有双钩爪的臂中部与偏心轮连杆一端铰接,偏心轮连杆另一端与偏心轮偏心铰接;动锁臂设有双钩爪的那个臂上开设的螺纹孔与螺栓连接,且螺栓穿过挡圈的中心孔;挡圈固定在门挂板上;复位弹簧套置在螺栓上,且复位弹簧两端分别由挡圈和动锁臂限位;螺栓尾部连接有螺母,螺母压紧挡圈设置。本发明独立的驱动机构实现门锁机构

一种具有防震功能的机械机床.pdf
本发明提供一种具有防震功能的机械机床,包括螺母、U型定位板、活动杆、U型固定板、底座板、导向孔、移动轮、减震弹簧以及导向杆,所述螺母通过螺纹设置在活动杆环形侧面上,所述螺母设置在U型定位板上侧,所述活动杆设置在U型定位板上,所述活动杆下端通过转轴与U型固定板相连接,所述U型固定板分别固定在底座板左右两侧,所述导向孔分别开设在底座板上端面四角位置,所述移动轮设置在导向孔内部,且移动轮固定在导向杆下端,所述导向杆环形侧面下部设置在导向孔内部,所述减震弹簧套装在导向杆上,该设计实现了减震的功能,本发明使用方便,

一种具有降噪功能的驱动装置.pdf
本发明公开了一种具有降噪功能的驱动装置,包括壳体、驱动装置和行走轮;驱动装置设置在壳体内,行走轮设置在壳体外,壳体包括第一壳体和第二壳体扣合而成;驱动装置上设置有第一输出轴,第一输出轴上设置有蜗杆;壳体中设置有输出装置和行星齿轮组,行星齿轮组包括太阳轮,太阳轮包括齿盘,齿盘的一侧设置有外齿轮,和小齿轮;齿盘与外齿轮构成容室,小齿轮位于容室内,小齿轮一侧的中心开设有小齿轮轴孔;齿盘上围绕小齿轮设置有若干个行星齿轮,各行星齿轮与小齿轮相啮合;各行星齿轮上均开设有行星齿轮轴孔;齿盘的另一侧的中心位置设置有轴承部