
用于物品传送的移动设备.pdf

书生****66

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于物品传送的移动设备.pdf
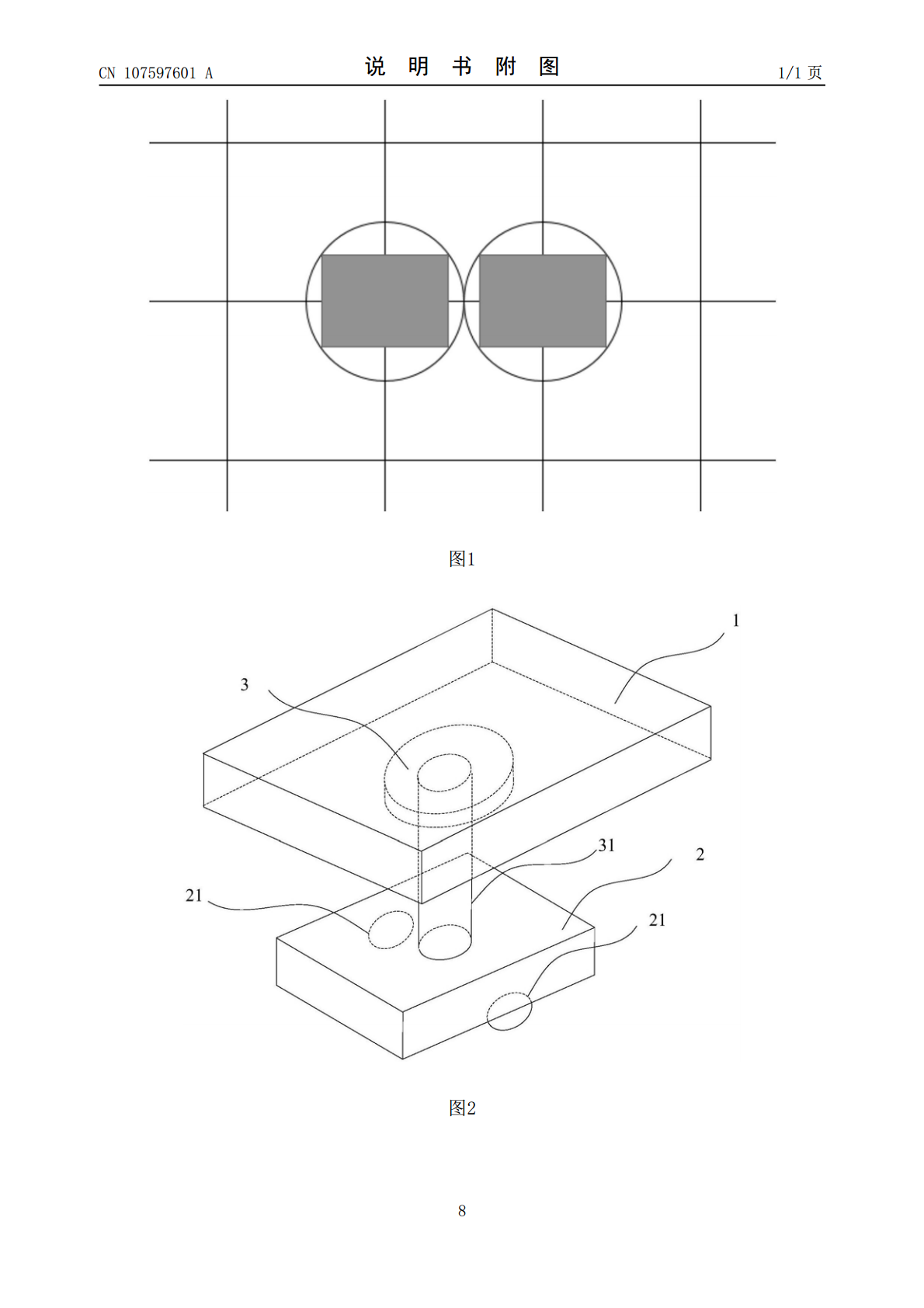
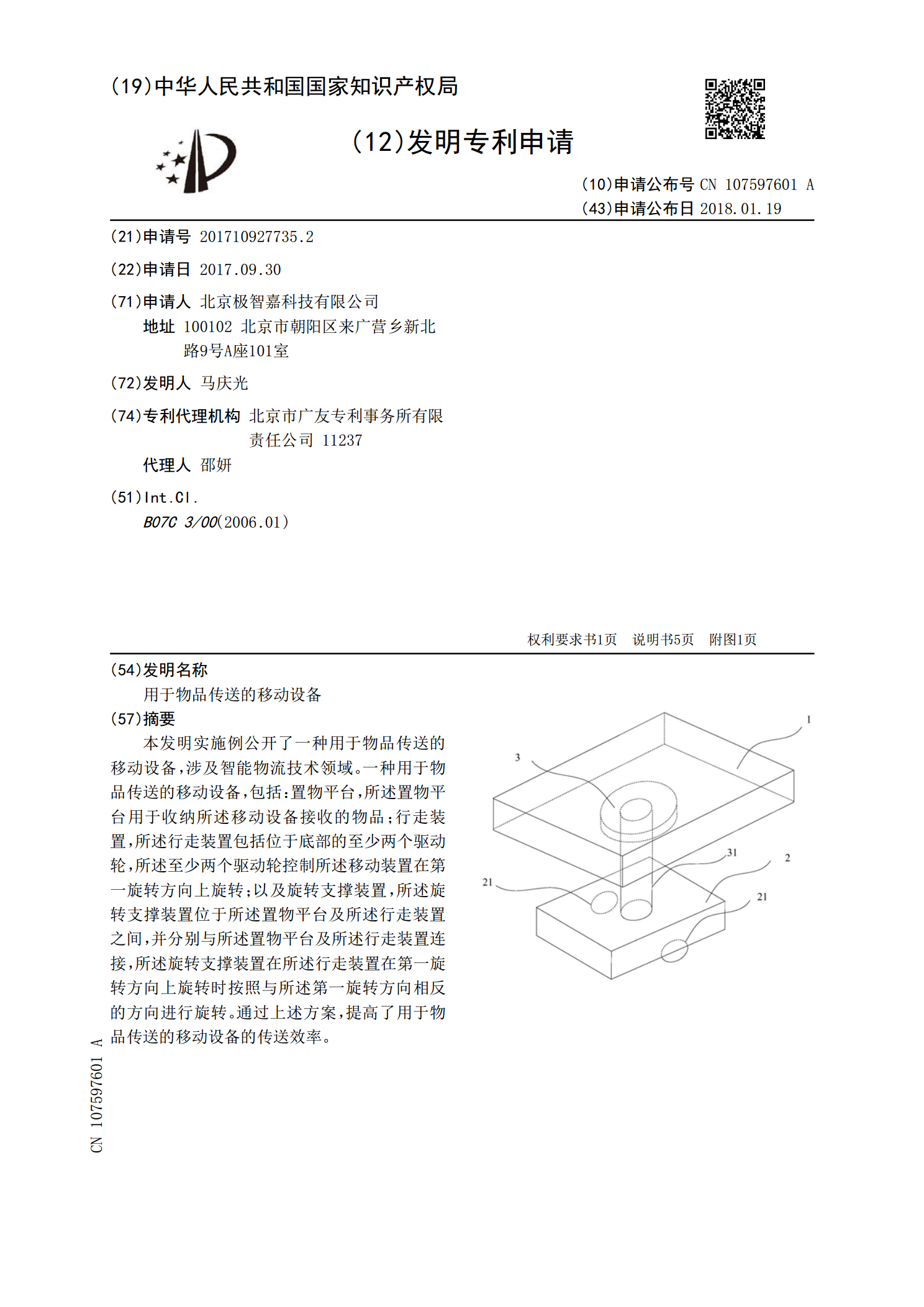
本发明实施例公开了一种用于物品传送的移动设备,涉及智能物流技术领域。一种用于物品传送的移动设备,包括:置物平台,所述置物平台用于收纳所述移动设备接收的物品;行走装置,所述行走装置包括位于底部的至少两个驱动轮,所述至少两个驱动轮控制所述移动装置在第一旋转方向上旋转;以及旋转支撑装置,所述旋转支撑装置位于所述置物平台及所述行走装置之间,并分别与所述置物平台及所述行走装置连接,所述旋转支撑装置在所述行走装置在第一旋转方向上旋转时按照与所述第一旋转方向相反的方向进行旋转。通过上述方案,提高了用于物品传送的移动设备

用于物品的移动设备.pdf
一种用于物品(2)的移动设备(1),包括:第一传送装置(10),第一传送装置包括第一运输器构件(11)和多个第一抓持头部(12),第一抓持头部安装在第一运输器构件上并被设置成将物品(2)移动成单排构型。移动设备还包括第二传送装置(20),第二传送装置被设置成从第一传送装置(10)接收物品(2),第二传送装置包括第二运输器构件(21)和安装在第二运输器构件上的多个第二抓持头部(22)。每个第二抓持头部(22)被设置成从相应的第一抓持头部(12)接收物品(2)并且将物品移动成多排构型。

用于传送物体的传送设备.pdf
一种用于传送物体的传送设备,包括:轨道(3),该轨道(3)形成环形通道(4),物体(100)沿该环形通道(4)传送;传送器(41,42),其能够沿轨道移动,并且包括至少一个用于抓取物体的抓取器(10);驱动器(7),其使传送器沿轨道移动,其中,传送器包括至少两个承载器(8),其接合轨道并定位成彼此间隔一定距离,相邻的承载器通过联接器(9)彼此联接,至少一个联接器承载至少一个抓取器,轨道包括第一面(12)和第二面(13),每个承载器包括接合第一面(12)的第一接合构件(14)和第二接合构件(15)以及接合第
一种用于高速传送物品的传送带.pdf
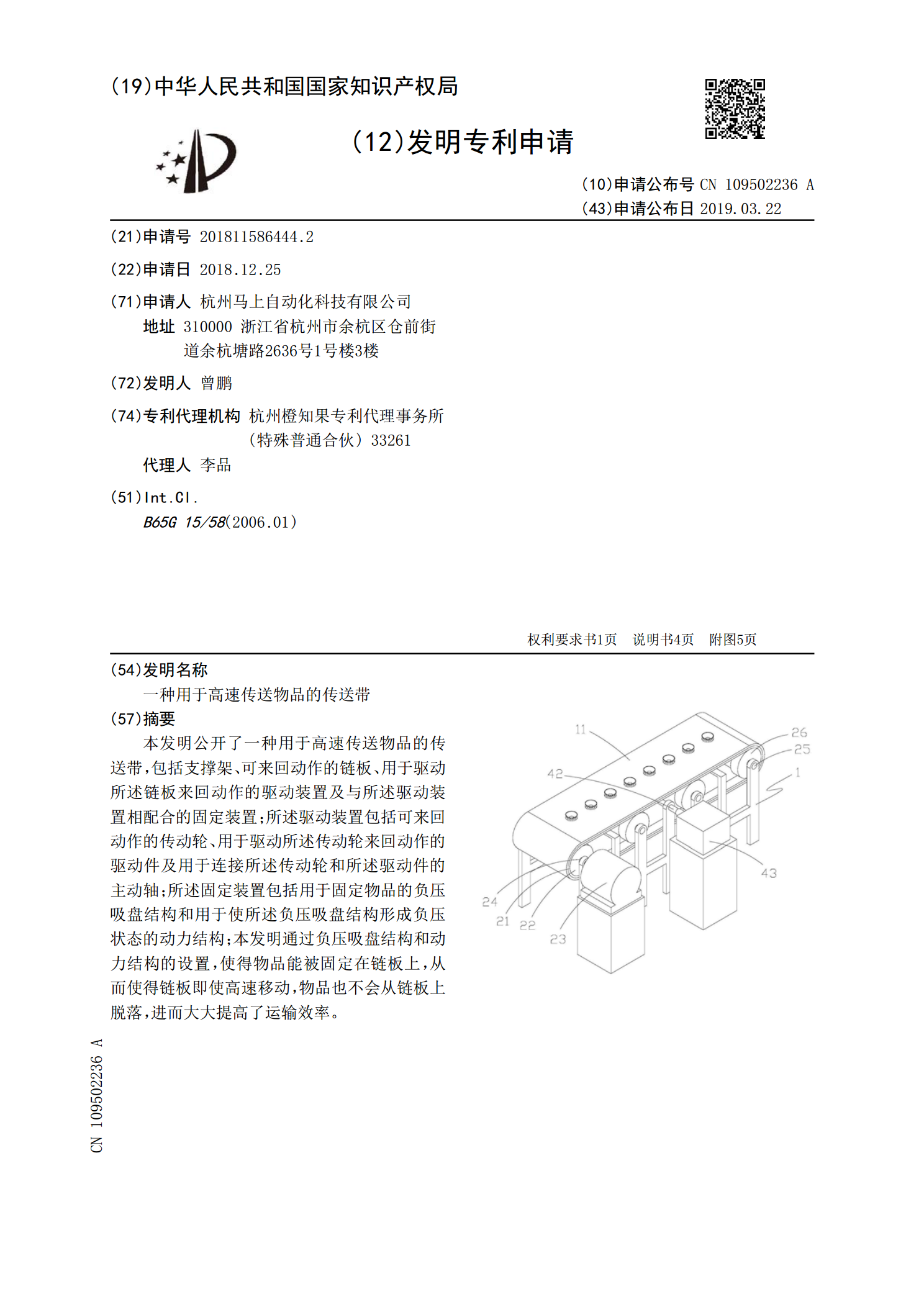
本发明公开了一种用于高速传送物品的传送带,包括支撑架、可来回动作的链板、用于驱动所述链板来回动作的驱动装置及与所述驱动装置相配合的固定装置;所述驱动装置包括可来回动作的传动轮、用于驱动所述传动轮来回动作的驱动件及用于连接所述传动轮和所述驱动件的主动轴;所述固定装置包括用于固定物品的负压吸盘结构和用于使所述负压吸盘结构形成负压状态的动力结构;本发明通过负压吸盘结构和动力结构的设置,使得物品能被固定在链板上,从而使得链板即使高速移动,物品也不会从链板上脱落,进而大大提高了运输效率。
具有用于传送物品的推车的运输总成.pdf
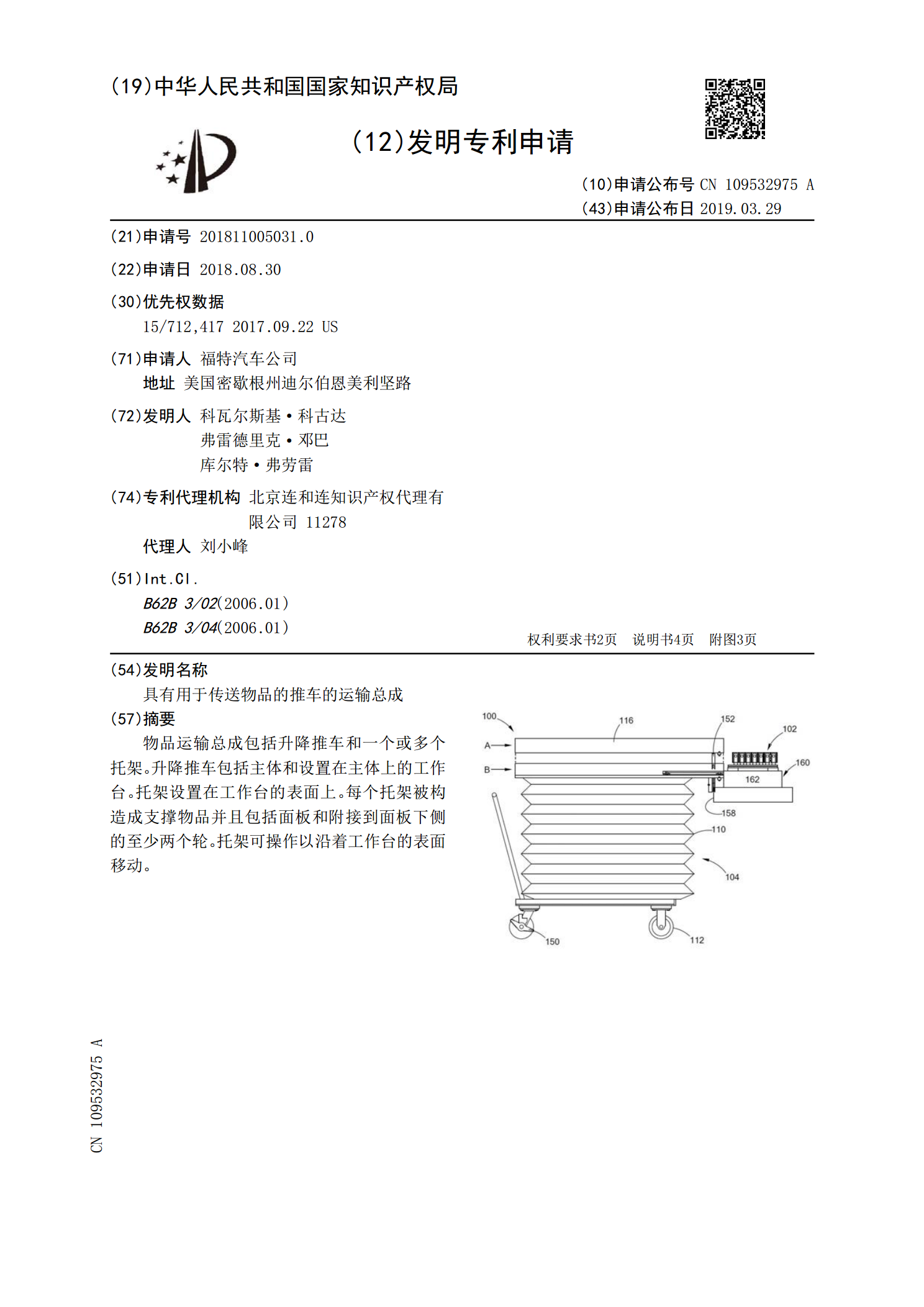
物品运输总成包括升降推车和一个或多个托架。升降推车包括主体和设置在主体上的工作台。托架设置在工作台的表面上。每个托架被构造成支撑物品并且包括面板和附接到面板下侧的至少两个轮。托架可操作以沿着工作台的表面移动。