
一种密闭式水下焊接机器人.pdf

篷璐****爱吗

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种密闭式水下焊接机器人.pdf
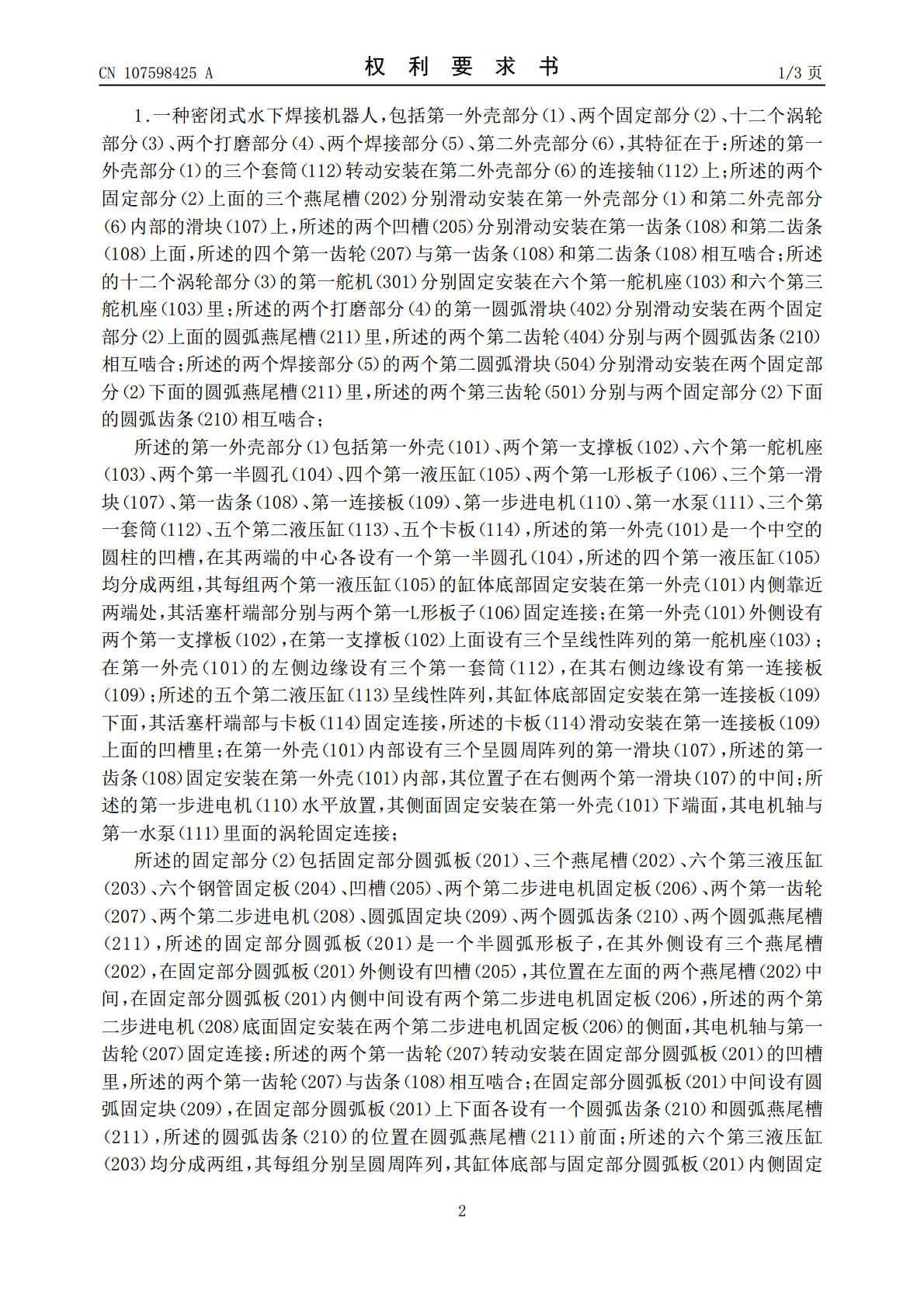
一种密闭式水下焊接机器人,包括第一外壳部分、两个固定部分、十二个涡轮部分、两个打磨部分、两个焊接部分、第二外壳部分,其特征在于:所述的两个焊接部分的两个第二圆弧滑块分别滑动安装在两个固定部分下面的圆弧燕尾槽里,所述的两个第三齿轮分别与两个固定部分下面的圆弧齿条相互啮合;通过第一外壳部分和第二外壳部分将焊接处夹住,通过六个第二液压缸收缩带动六个卡板将两个外壳部分锁紧,通过第一步进电机带动第一水泵和第七步进电机带动第二水泵将外壳部分里面的水抽干,使机器完成将焊接处的水抽干,给焊接提供了一个好的环境,提高了焊接
一种水下钢管焊接机器人.pdf
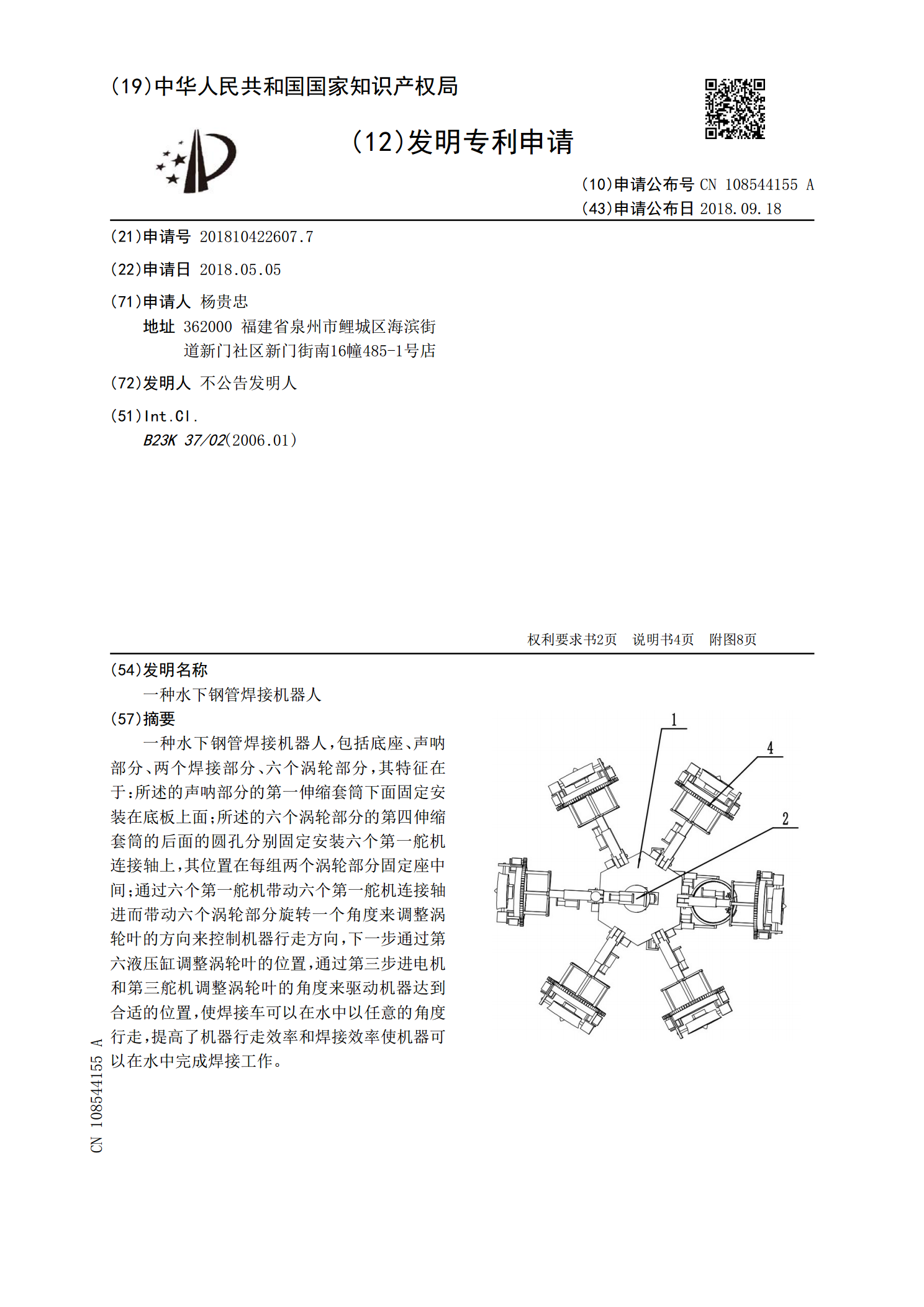
一种水下钢管焊接机器人,包括底座、声呐部分、两个焊接部分、六个涡轮部分,其特征在于:所述的声呐部分的第一伸缩套筒下面固定安装在底板上面;所述的六个涡轮部分的第四伸缩套筒的后面的圆孔分别固定安装六个第一舵机连接轴上,其位置在每组两个涡轮部分固定座中间;通过六个第一舵机带动六个第一舵机连接轴进而带动六个涡轮部分旋转一个角度来调整涡轮叶的方向来控制机器行走方向,下一步通过第六液压缸调整涡轮叶的位置,通过第三步进电机和第三舵机调整涡轮叶的角度来驱动机器达到合适的位置,使焊接车可以在水中以任意的角度行走,提高了机器

一种水下焊接机器人控制装置.pdf
本发明提供一种水下焊接机器人控制装置,包括导轨、控制台和驱动电机,所述导轨呈弧形设置,所述控制台设在导轨上,所述控制台下方设置有槽轮,所述控制台通过槽轮与导轨滑动连接,所述驱动电机设在控制台一侧,所述驱动电机与控制台电性连接,所述控制台上设置有横向执行机构、纵向执行机构和摆动机构,所述驱动电机、横向执行机构、纵向执行机构和摆动机构依次传动连接,所述摆动机构下方设置有焊接机械手,该水下焊接机器人控制装置结构简单,操控方便,非常适合水下管道的焊接,焊接精度高。

一种水下焊接设备.pdf
一种水下焊接设备,包括底座、六个螺旋桨部分、起浮部分、焊接部分,其特征在于:六个螺旋桨部分的圆形连接盘分别安装在六个圆形支撑板上面,所述的第一圆形凹槽安装在九个滚珠上;所述的起浮部分的第二圆形凹槽安装在六个起浮部分固定板中间;所述的焊接部分的方形套筒滑动安装在焊接部分支撑板上,所述的两个齿轮分别与另两个齿条相互啮合;通过两个第四步进电机带动两个第二齿轮进而带动焊接部分上下移动,通过第三步进电机带动第一齿轮进而带动焊接头旋转一个角度,通过四个第四液压缸和第五液压缸调节焊接头的长度,通过第二舵机调节焊接头的角
一种用于水下检测的水下机器人.pdf
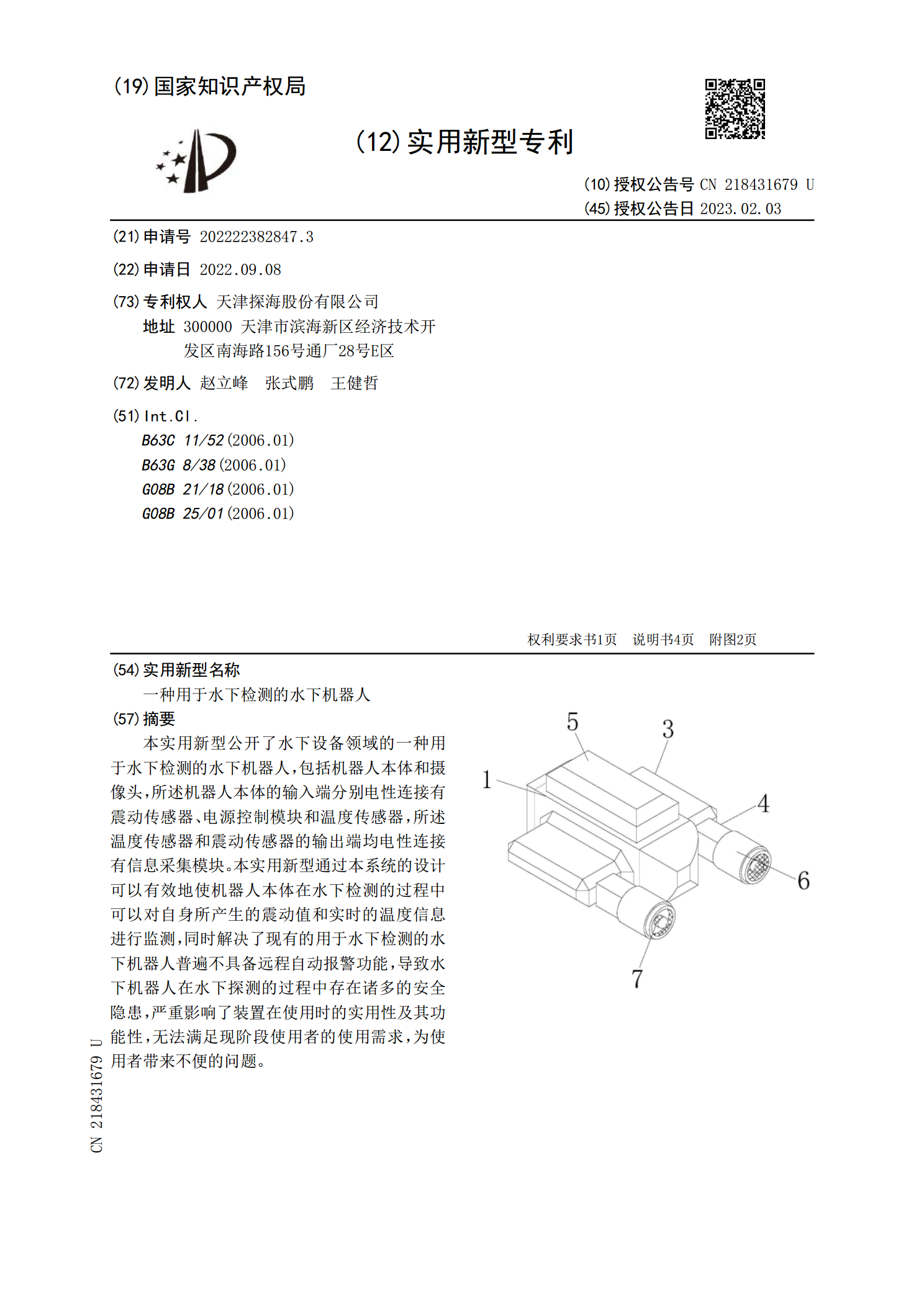
本实用新型公开了水下设备领域的一种用于水下检测的水下机器人,包括机器人本体和摄像头,所述机器人本体的输入端分别电性连接有震动传感器、电源控制模块和温度传感器,所述温度传感器和震动传感器的输出端均电性连接有信息采集模块。本实用新型通过本系统的设计可以有效地使机器人本体在水下检测的过程中可以对自身所产生的震动值和实时的温度信息进行监测,同时解决了现有的用于水下检测的水下机器人普遍不具备远程自动报警功能,导致水下机器人在水下探测的过程中存在诸多的安全隐患,严重影响了装置在使用时的实用性及其功能性,无法满足现阶段