
机器打滑检测的方法、装置及系统.pdf

阳炎****找我


1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器打滑检测的方法、装置及系统.pdf
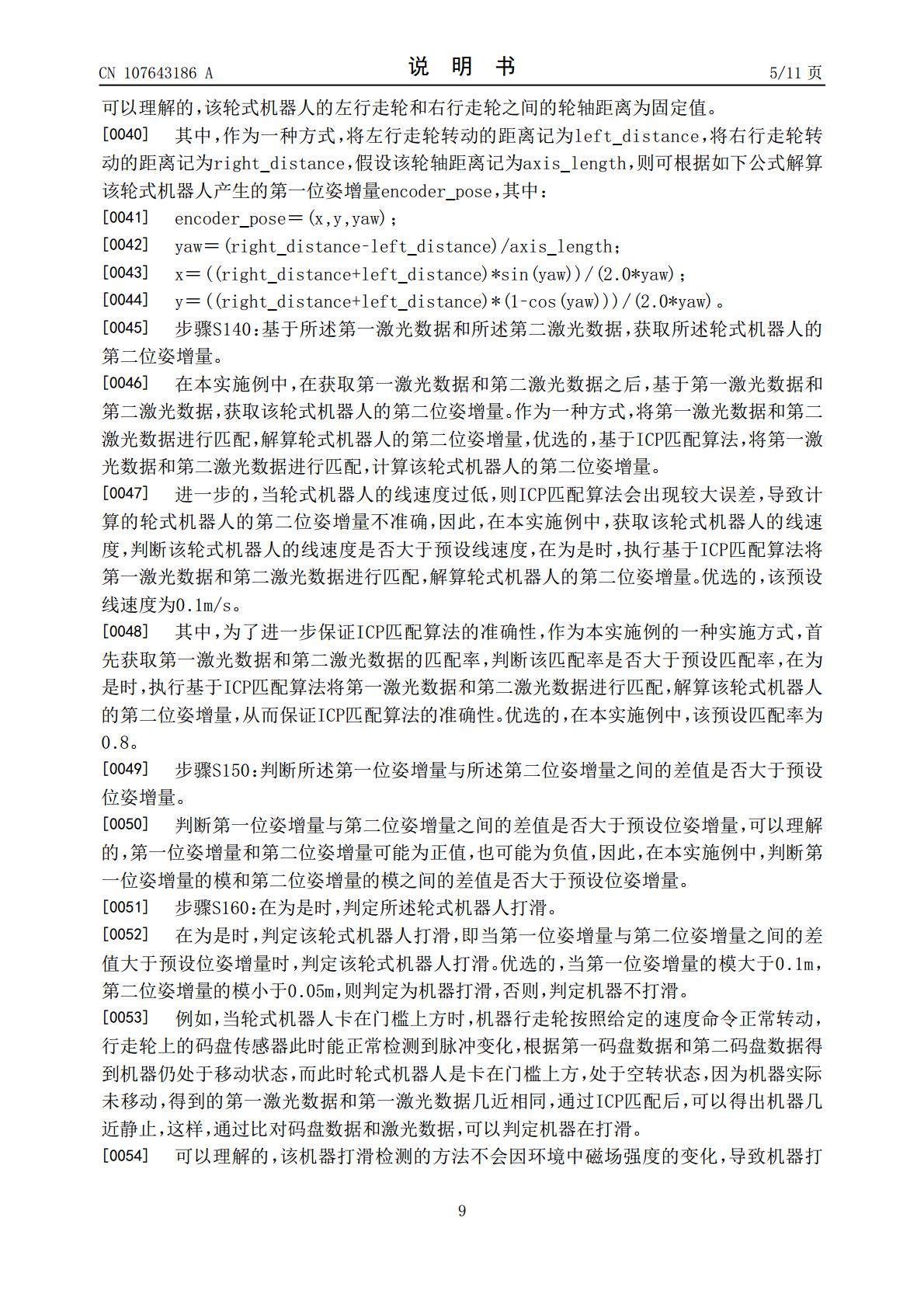
本发明提供了一种机器打滑检测的方法、装置及系统,涉及机器人检测领域。该方法应用于轮式机器人,该方法包括:首先获取第一时刻的轮式机器人的第一码盘数据和第一激光数据,基于第一时刻,获取第二时刻的轮式机器人的第二码盘数据和第二激光数据,然后基于第一码盘数据和第二码盘数据,获取轮式机器人的第一位姿增量,基于第一激光数据和第二激光数据,获取轮式机器人的第二位姿增量,最后判断第一位姿增量与第二位姿增量之间的差值是否大于预设位置增量,在为是时,判定该轮式机器人打滑。本发明能够缓解现有技术中打滑检测不准确的问题。

机器人打滑检测方法、系统及装置.pdf
本发明适用于机器人技术领域,提供了一种机器人打滑检测方法、系统及装置,该方法包括:获取机器人上主动轮的运动信息;获取所述机器人所处区域的环境观测信息;通过对比不同时间所获取的所述环境观测信息中所述机器人的位置变化,以获取所述机器人的实际运动信息;当所述主动轮的运动信息与所述实际运动信息之间的运动差值大于预设阈值时,判定所述机器人处于打滑状态。本发明通过对所述主动轮的运动信息和所述实际运动信息的获取,以通过采用将获取到的机器人的实际运动信息与主动轮上的运动信息进行比较的方式,以对应判断主动轮是否发生打滑现象
把持工具、把持系统、打滑检测装置、打滑检测程序及打滑检测方法.pdf
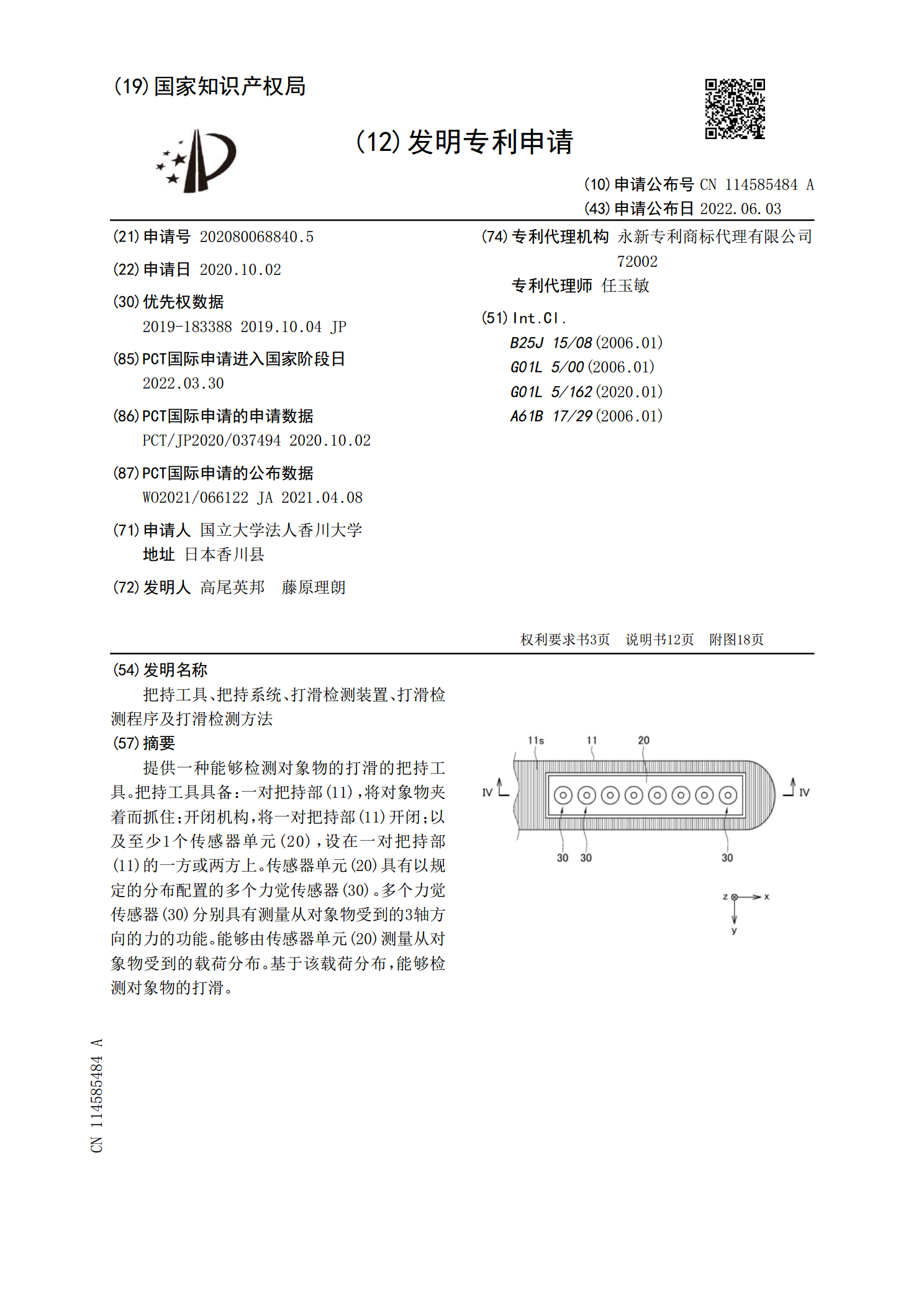
提供一种能够检测对象物的打滑的把持工具。把持工具具备:一对把持部(11),将对象物夹着而抓住;开闭机构,将一对把持部(11)开闭;以及至少1个传感器单元(20),设在一对把持部(11)的一方或两方上。传感器单元(20)具有以规定的分布配置的多个力觉传感器(30)。多个力觉传感器(30)分别具有测量从对象物受到的3轴方向的力的功能。能够由传感器单元(20)测量从对象物受到的载荷分布。基于该载荷分布,能够检测对象物的打滑。
检测室内轮式机器人轮子打滑的方法及装置.pdf
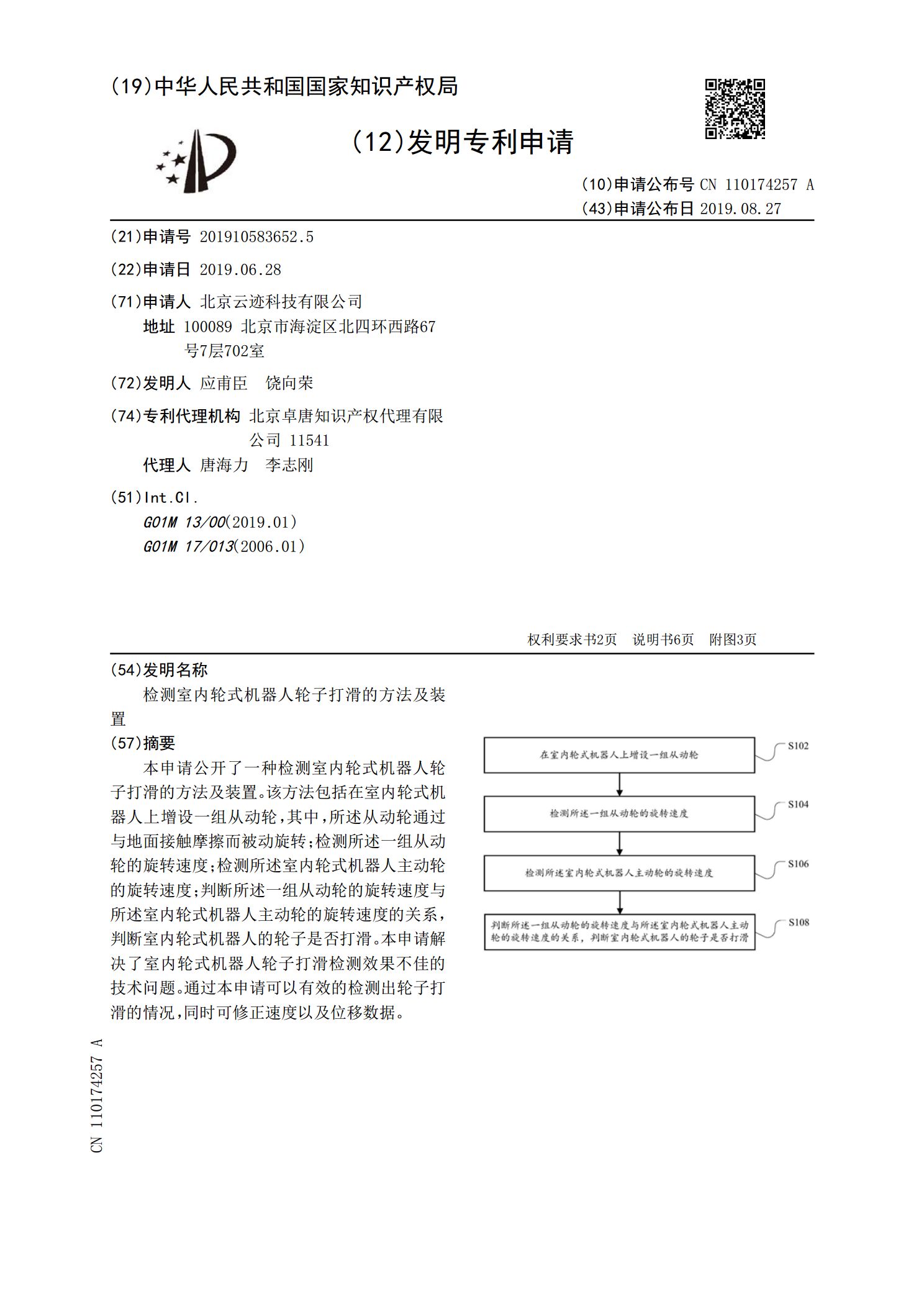
本申请公开了一种检测室内轮式机器人轮子打滑的方法及装置。该方法包括在室内轮式机器人上增设一组从动轮,其中,所述从动轮通过与地面接触摩擦而被动旋转;检测所述一组从动轮的旋转速度;检测所述室内轮式机器人主动轮的旋转速度;判断所述一组从动轮的旋转速度与所述室内轮式机器人主动轮的旋转速度的关系,判断室内轮式机器人的轮子是否打滑。本申请解决了室内轮式机器人轮子打滑检测效果不佳的技术问题。通过本申请可以有效的检测出轮子打滑的情况,同时可修正速度以及位移数据。
列车空转打滑检测方法及装置.pdf
本发明提供一种列车空转打滑检测方法及装置,列车空转打滑检测方法包括:基于车载传感器检测到的目标列车行驶的速度信息,以及所述目标列车的加减速度信息进行特征提取,得到待检测数据集;将所述待检测数据集输入空转打滑检测模型中,得到所述空转打滑检测模型输出的空转打滑检测结果,其中,所述空转打滑检测模型是基于训练数据集以及所述训练数据集对应的标注数据集进行训练得到的,实现对列车的空转和打滑进行精准的检测。