
一种应用于机械臂关节中的伺服驱动系统.pdf

元容****少女

1/10

2/10
3/10

4/10
5/10

6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种应用于机械臂关节中的伺服驱动系统.pdf
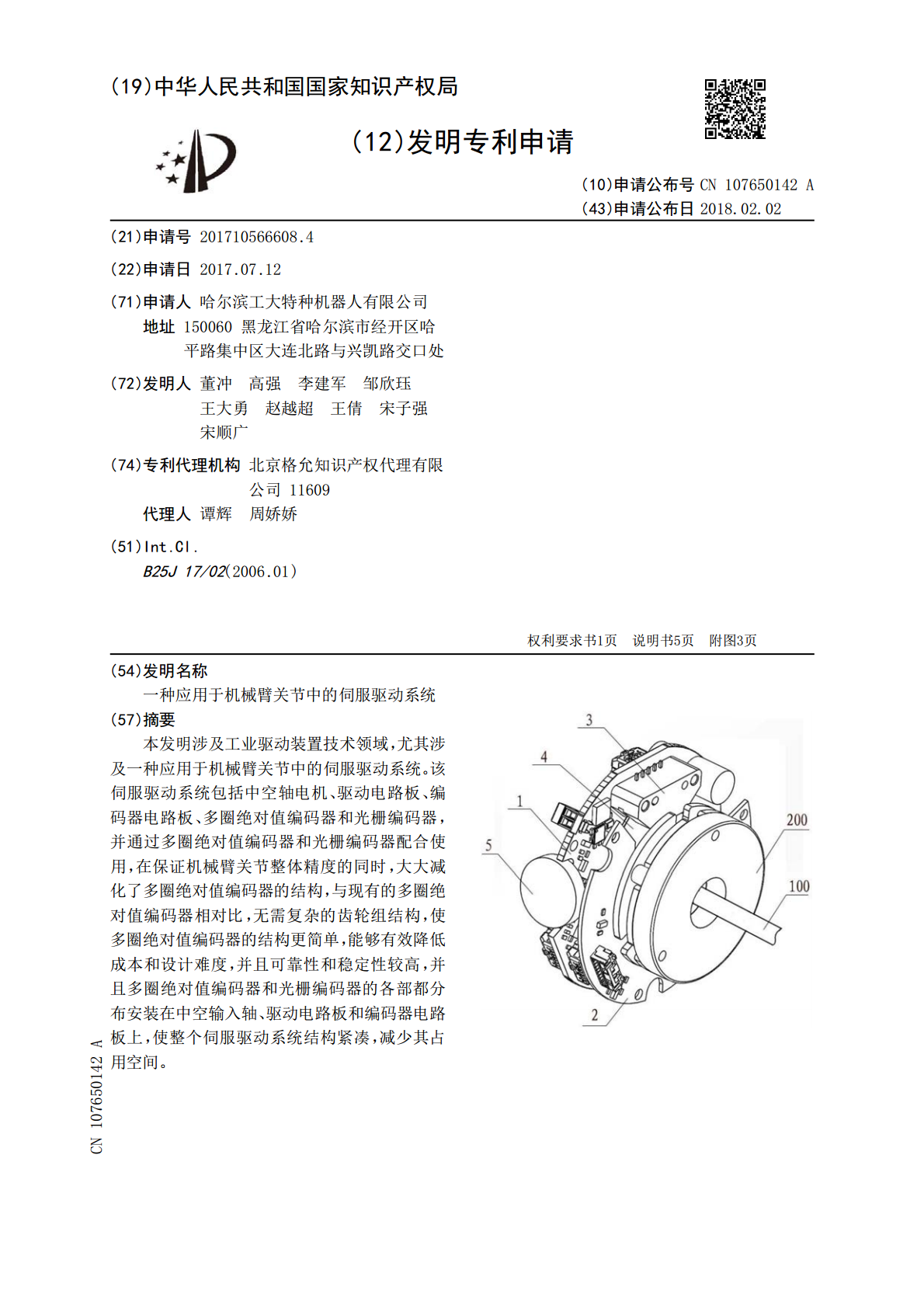
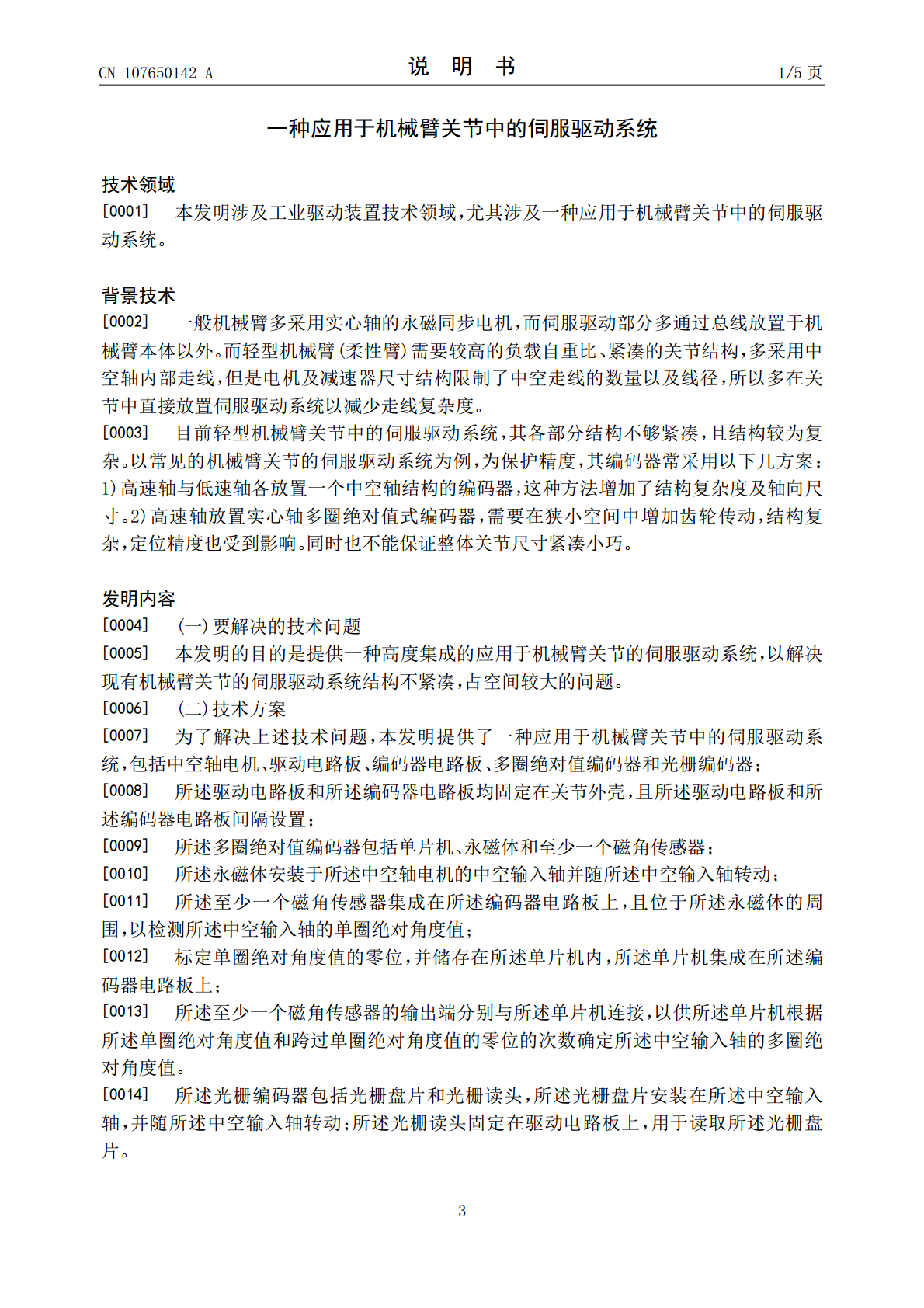
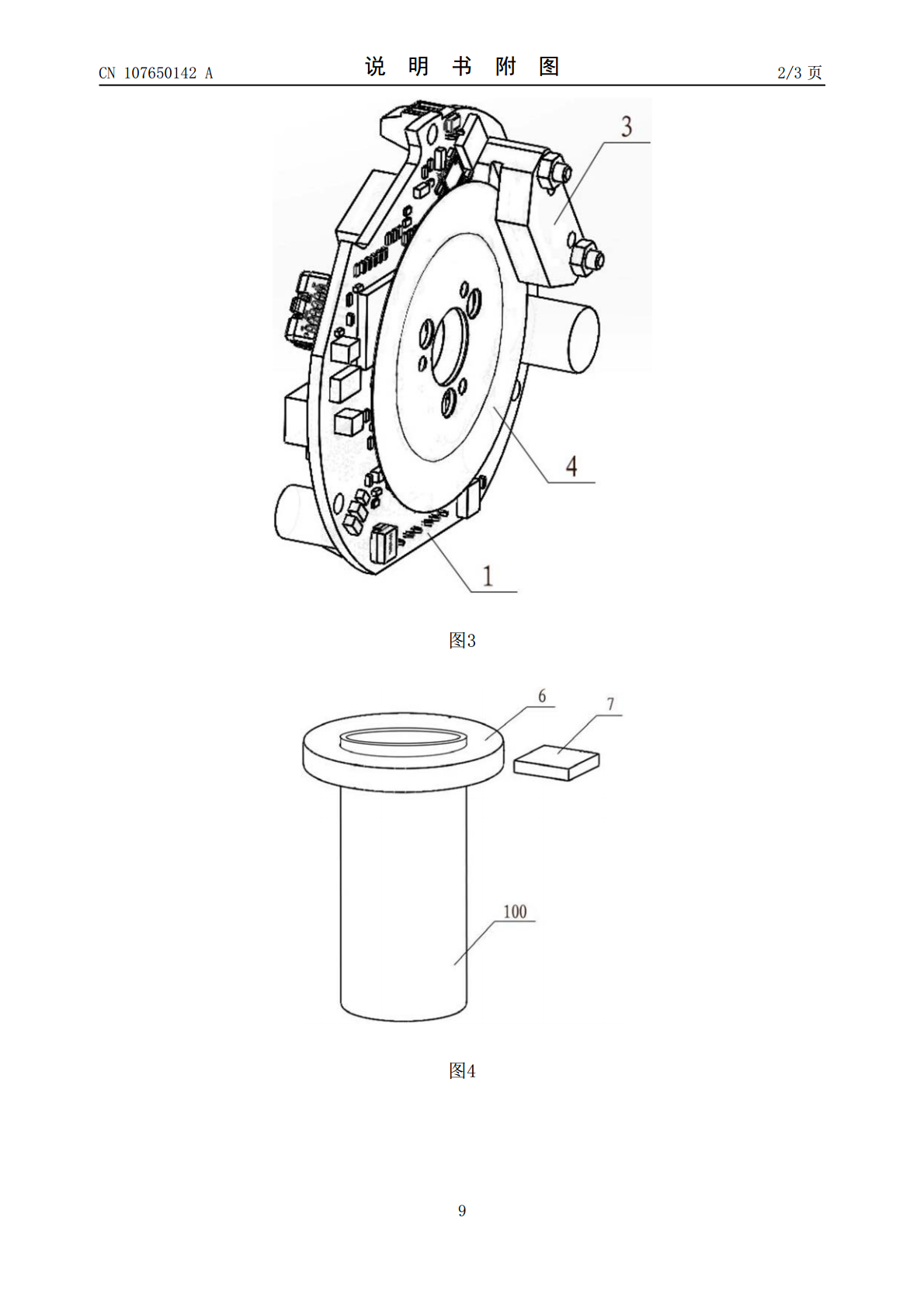
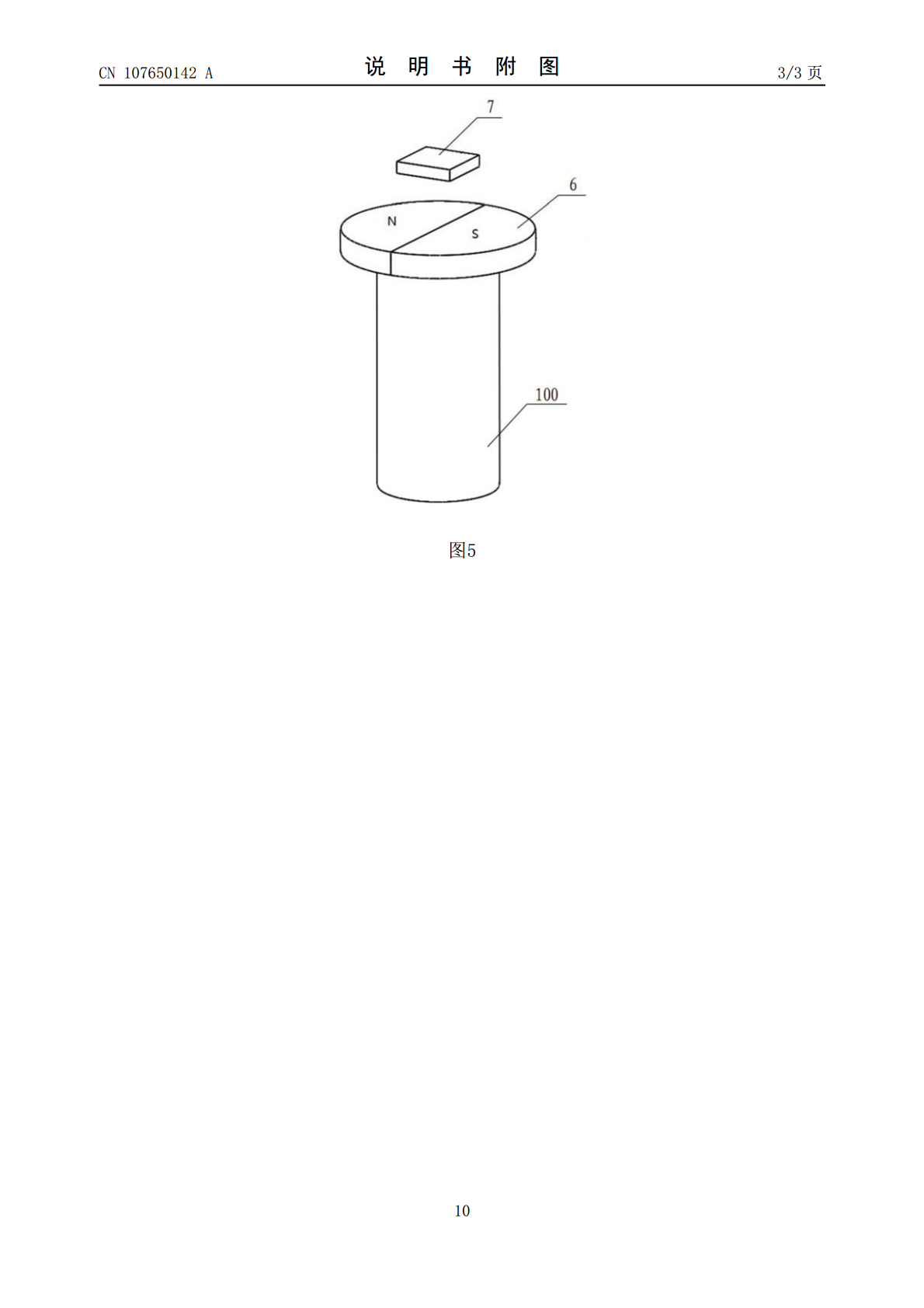
本发明涉及工业驱动装置技术领域,尤其涉及一种应用于机械臂关节中的伺服驱动系统。该伺服驱动系统包括中空轴电机、驱动电路板、编码器电路板、多圈绝对值编码器和光栅编码器,并通过多圈绝对值编码器和光栅编码器配合使用,在保证机械臂关节整体精度的同时,大大减化了多圈绝对值编码器的结构,与现有的多圈绝对值编码器相对比,无需复杂的齿轮组结构,使多圈绝对值编码器的结构更简单,能够有效降低成本和设计难度,并且可靠性和稳定性较高,并且多圈绝对值编码器和光栅编码器的各部都分布安装在中空输入轴、驱动电路板和编码器电路板上,使整个伺

一种丝杠伺服关节机械臂.pdf
本发明公开了一种丝杠伺服关节机械臂,包括若干节依次连接的单元体,单元体的一端设置有固定法兰,单元体的另一端设置有与固定法兰相对应的旋转法兰,单元体包括外壳,外壳固定连接固定法兰,外壳内设置有丝杠伺服单元,丝杠伺服单元包括数控电机,数控电机通过滚珠丝杠连接有移动座,移动座连接有传动机构,传动机构包括旋转轮和张紧轮以及设置在旋转轮和张紧轮之间的传动带,传动带与移动座固定连接,旋转轮连接有输出轴,输出轴固定连接旋转法兰。本发明的有益效果:丝杠伺服单元精度高,传动效率高,抗冲击性好,成本极低,非常适合关节式机器人
一种串联驱动柔顺机械臂关节.pdf
本发明公开了一种串行驱动柔顺机械臂关节,包括关节电机、谐波减速器、四连杆机构、关节外壳、输出外壳,所述关节电机与电机谐波连接件通过螺钉固定连接,电机谐波连接件上设有谐波减速器,谐波减速器波发生器的外侧套设有谐波减速器柔轮,谐波减速器柔轮的上表面与法兰盘连接,谐波减速器柔轮与法兰盘通过螺钉固定连接,法兰盘上固定有片弹簧底座,片弹簧底座上方固定连接有片弹簧,片弹簧的上方设有四连杆机构,通过刚度电机驱动主动锥齿轮,通过齿轮啮合带动从动锥齿轮,从而带动凸轮旋转,由于凸轮与四连杆机构的连接点接触,使得四连杆鞍形支架

一种欠驱动多关节机械臂.pdf
本发明公开了一种欠驱动多关节机械臂,包括依次相连的基座和至少三节机械臂,基座上设有摩擦轮、传动轴、第一驱动电机以及第二驱动电机,摩擦轮和传动轴通过齿轮传动;除了最后两节以外,每节机械臂内均设有传动轴、摩擦轮和摩擦盘,其中摩擦轮均与该机械臂内传动轴通过齿轮传动,机械臂与机械臂之间以及机械臂与基座之间的传动轴均在连接处通过可伸缩双万向节相连,每节机械臂的摩擦盘与其前一节机械臂或基座的摩擦轮配合安装,摩擦盘通过皮带驱动其下节机械臂转动;倒数第二节机械臂内仅设有与其前一节机械臂内摩擦轮配合安装的摩擦盘,该摩擦盘通

多轴机械臂关节伺服系统的控制方法及系统.pdf
本申请提供一种多轴机械臂关节伺服系统的控制方法及系统,应用于机器人及其伺服技术领域,其中控制方法包括构建机械臂中各关节的伺服系统对应的加速度反馈闭环传递函数;从所述机械臂在工作期间容许的负载惯量的变化范围,按预设的选取策略确定各关节的伺服系统对应的负载惯量比R值;根据各轴加速度增益值具有最小增益偏差的约束关系,求解出各关节的伺服系统对应的加速度反馈增益k值;将各关节的伺服系统对应的负载惯量比R值及加速度反馈增益k值,用于该关节的伺服系统对应的所述加速度反馈闭环传递函数中。通过从机械臂整体结构的惯量变化角度