
一种数据输出传动机构.pdf

邻家****曼玉

1/8
2/8
3/8

4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种数据输出传动机构.pdf
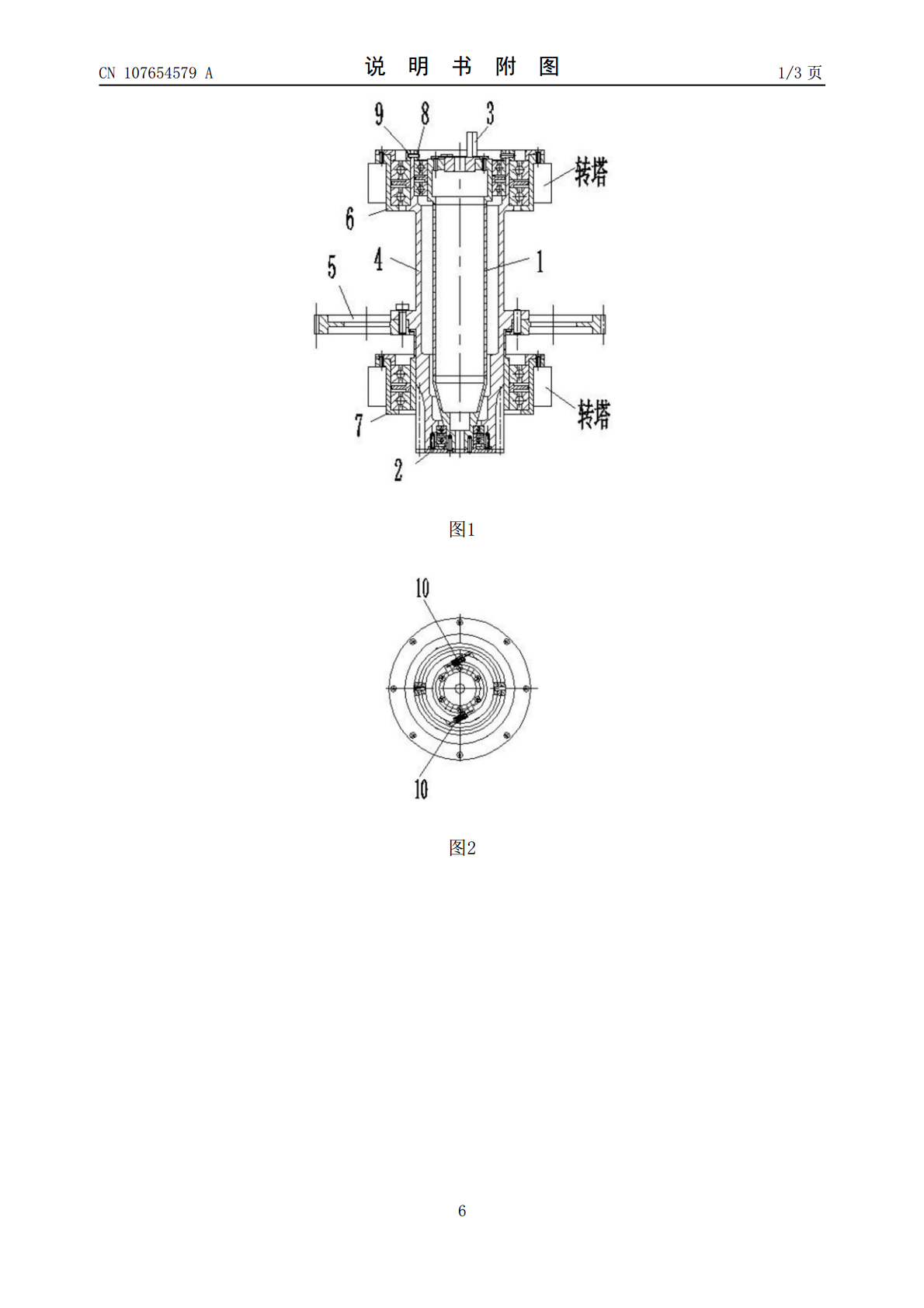
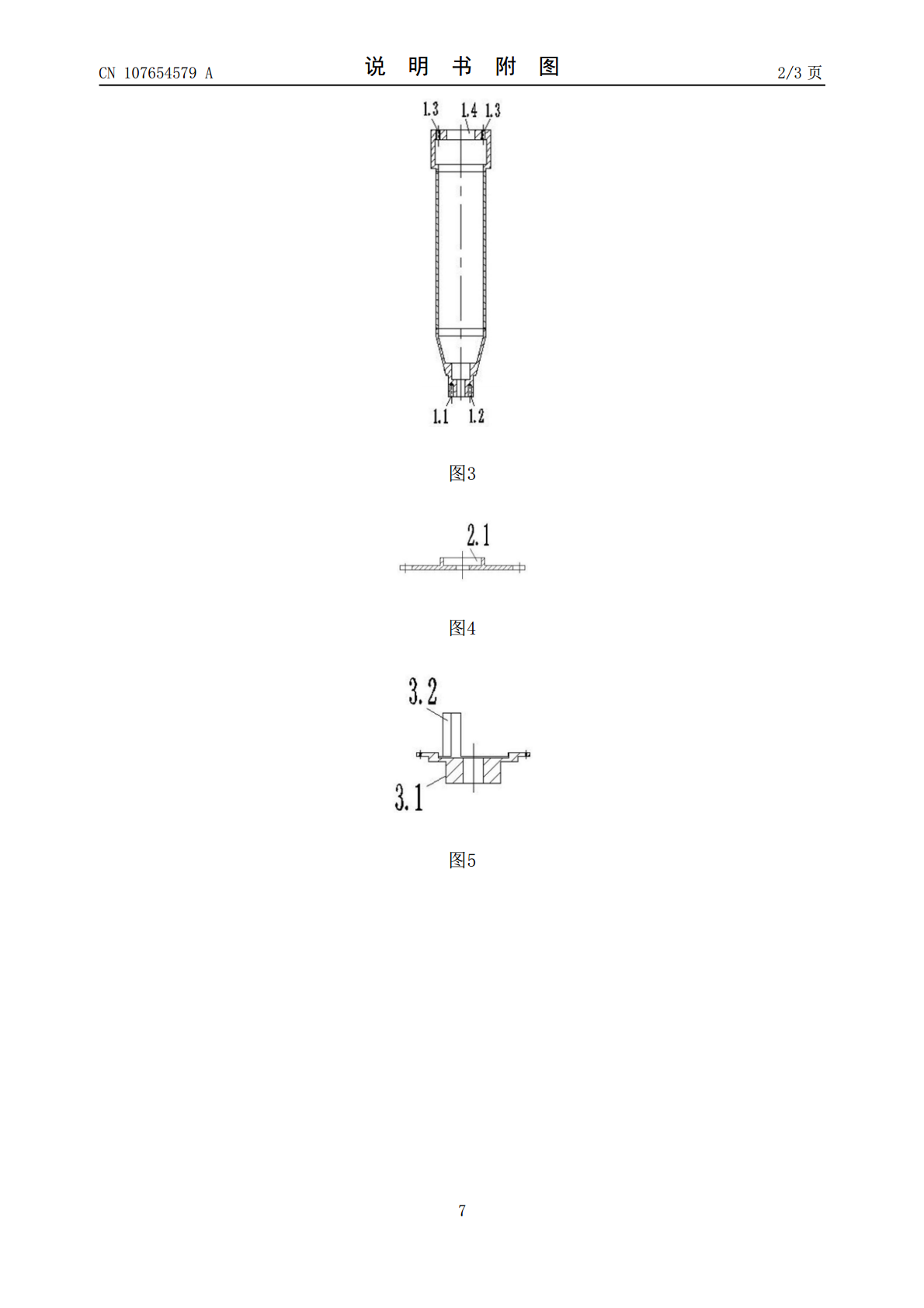
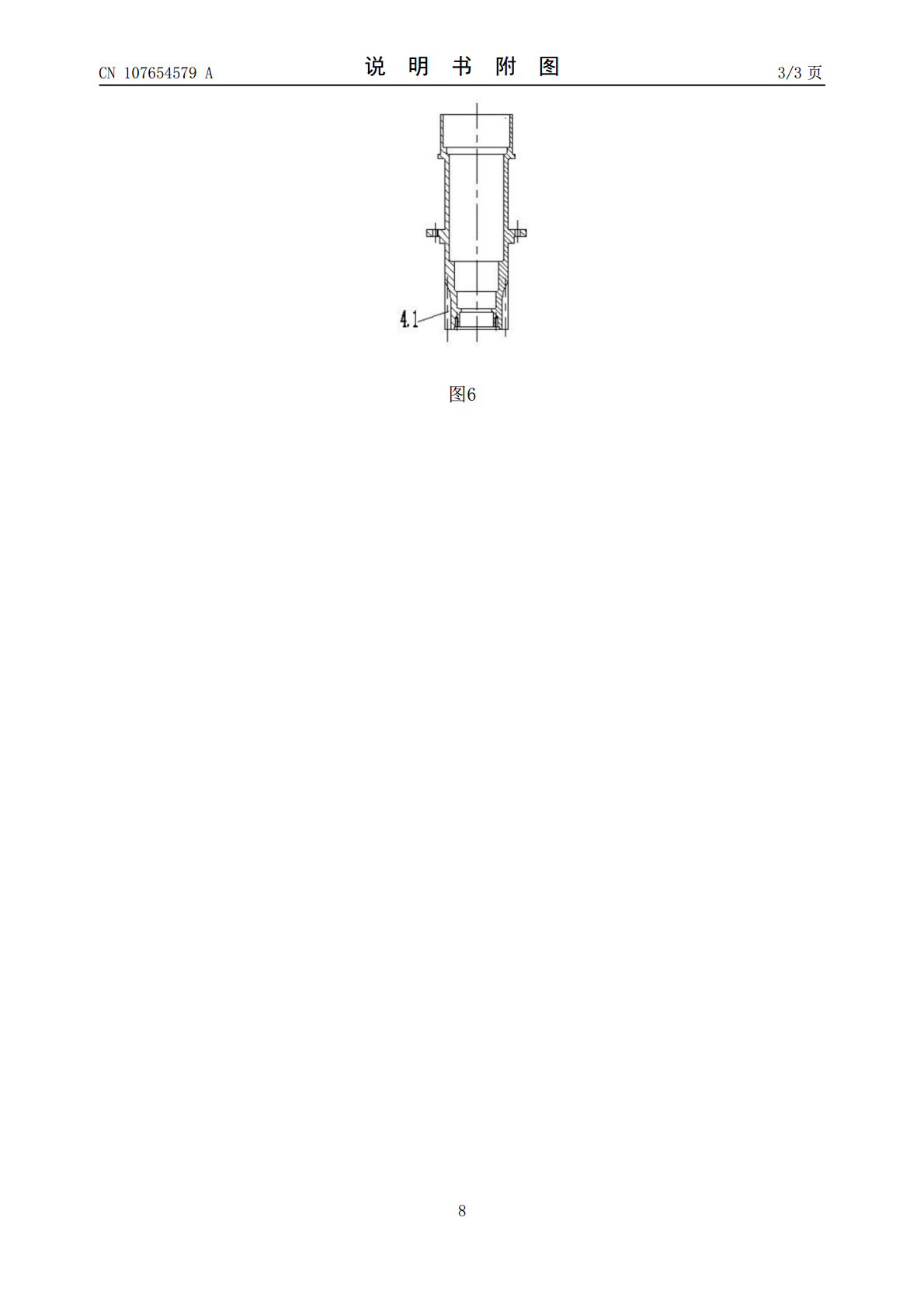
本发明公开了一种数据输出传动机构,包括数据输出轴、数据输出齿轮、数据采集器连接拨叉以及动力输入轴,所述的数据输出轴以及动力输入轴均为薄壁套筒状零件,动力输入轴套在数据输出轴上,数据输出轴上端和下端分别经轴承安装在动力输入轴上下两端的内孔中;在动力输入轴中部设有动力输入齿轮,动力输入齿轮与动力输入轴经孔轴配合后通过螺钉和定位销轴向固定连接;动力输入轴上下两端分别经轴承安装在上支撑座和下支撑座的内孔中。本发明在利用齿轮传动获取方位机构的空间旋转角度信息时,不但采用了消隙齿轮结构消除了齿轮啮合侧隙,而且数据输出
一种数据输出传动机构.pdf
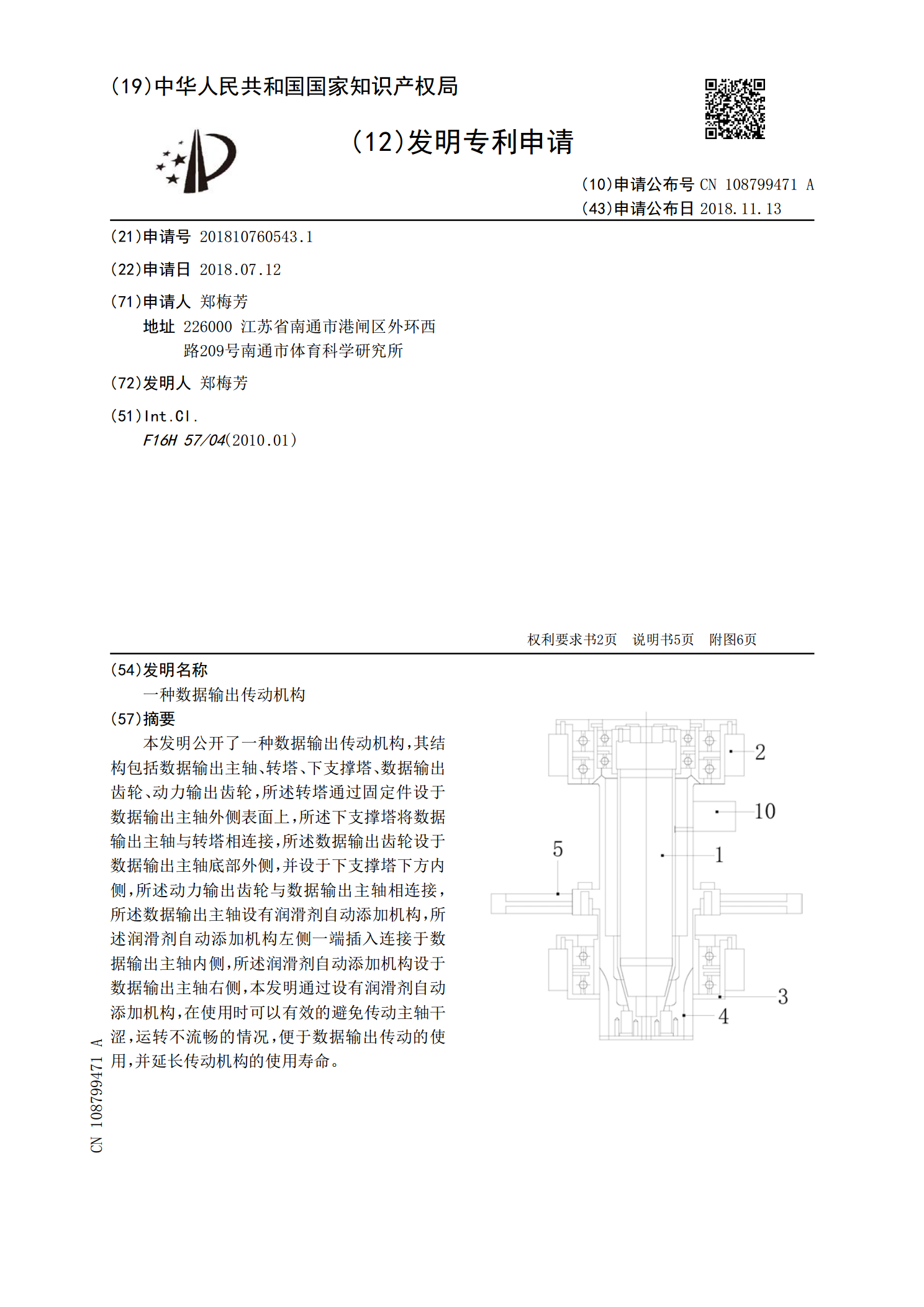
本发明公开了一种数据输出传动机构,其结构包括数据输出主轴、转塔、下支撑塔、数据输出齿轮、动力输出齿轮,所述转塔通过固定件设于数据输出主轴外侧表面上,所述下支撑塔将数据输出主轴与转塔相连接,所述数据输出齿轮设于数据输出主轴底部外侧,并设于下支撑塔下方内侧,所述动力输出齿轮与数据输出主轴相连接,所述数据输出主轴设有润滑剂自动添加机构,所述润滑剂自动添加机构左侧一端插入连接于数据输出主轴内侧,所述润滑剂自动添加机构设于数据输出主轴右侧,本发明通过设有润滑剂自动添加机构,在使用时可以有效的避免传动主轴干涩,运转不

一种传动输出机构、齿轮箱和传动输出机构的组装方法.pdf
本发明提供了一种传动输出机构,包括轴体和固定在所述轴体上的输出架,所述轴体包括输出段、中间段和输入段,所述输出架上设有通孔,所述输出架的通孔与所述轴体的输入段为过盈配合。本发明还提供了一种齿轮箱。本发明还提供了一种传动输出机构的组装方法。本发明的有益效果是:避免了传统花键孔的结构,不需要复杂的加工工艺和精密加工设备,显著降低微型齿轮箱输出轴的制造难度,特别适用于微型行星齿轮减速器的输出,具有结构简单、连接可靠、加工方便的优点。
一种同轴双输出传动机构.pdf
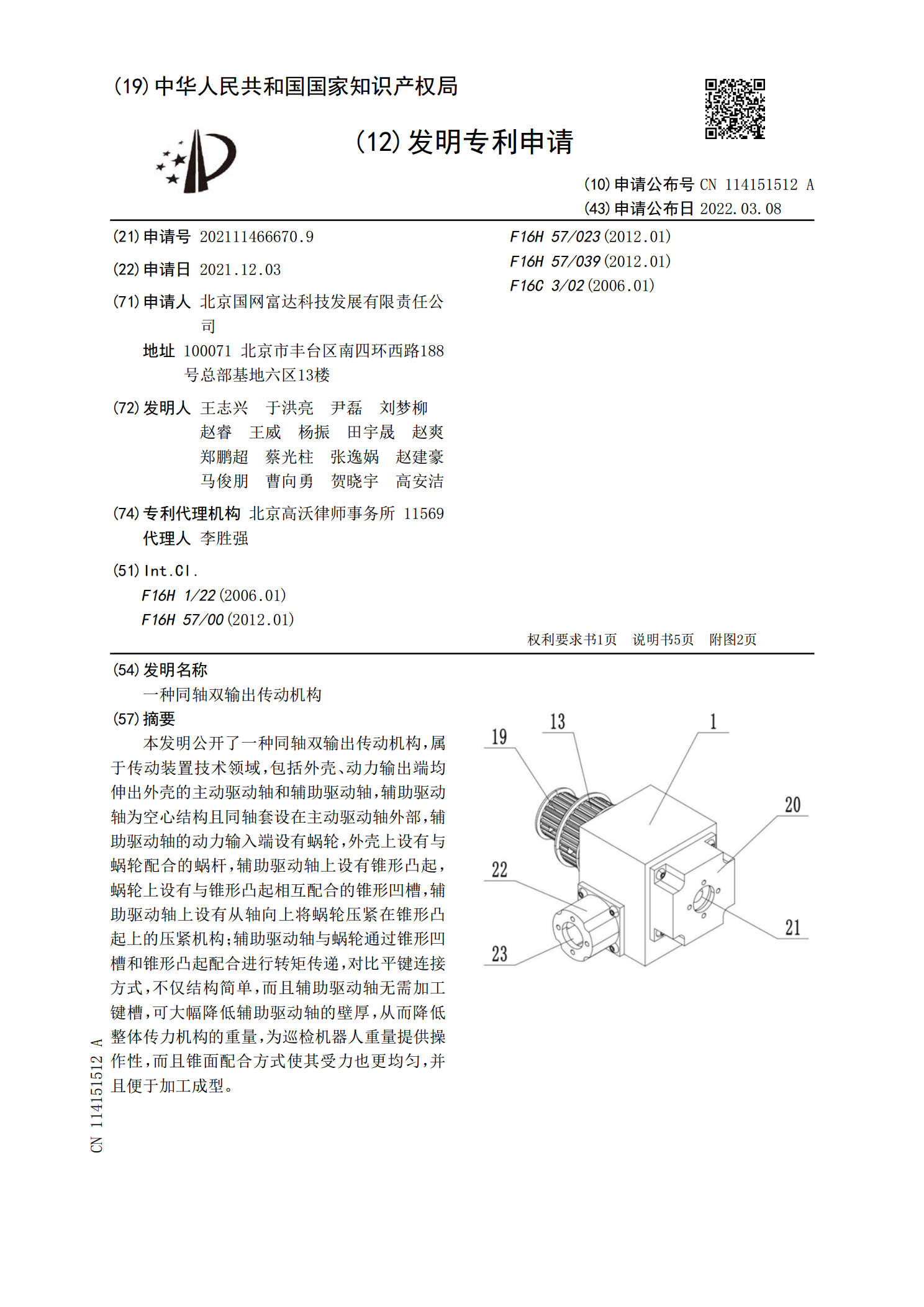
本实用新型公开了一种同轴双输出传动机构,属于传动装置技术领域,包括外壳、动力输出端均伸出外壳的主动驱动轴和辅助驱动轴,辅助驱动轴为空心结构且同轴套设在主动驱动轴外部,辅助驱动轴的动力输入端设有蜗轮,外壳上设有与蜗轮配合的蜗杆,辅助驱动轴上设有锥形凸起,蜗轮上设有与锥形凸起相互配合的锥形凹槽,辅助驱动轴上设有从轴向上将蜗轮压紧在锥形凸起上的压紧机构;辅助驱动轴与蜗轮通过锥形凹槽和锥形凸起配合进行转矩传递,对比平键连接方式,不仅结构简单,而且辅助驱动轴无需加工键槽,可大幅降低辅助驱动轴的壁厚,从而降低整体传力
一种动力输出轴单向传动机构.pdf
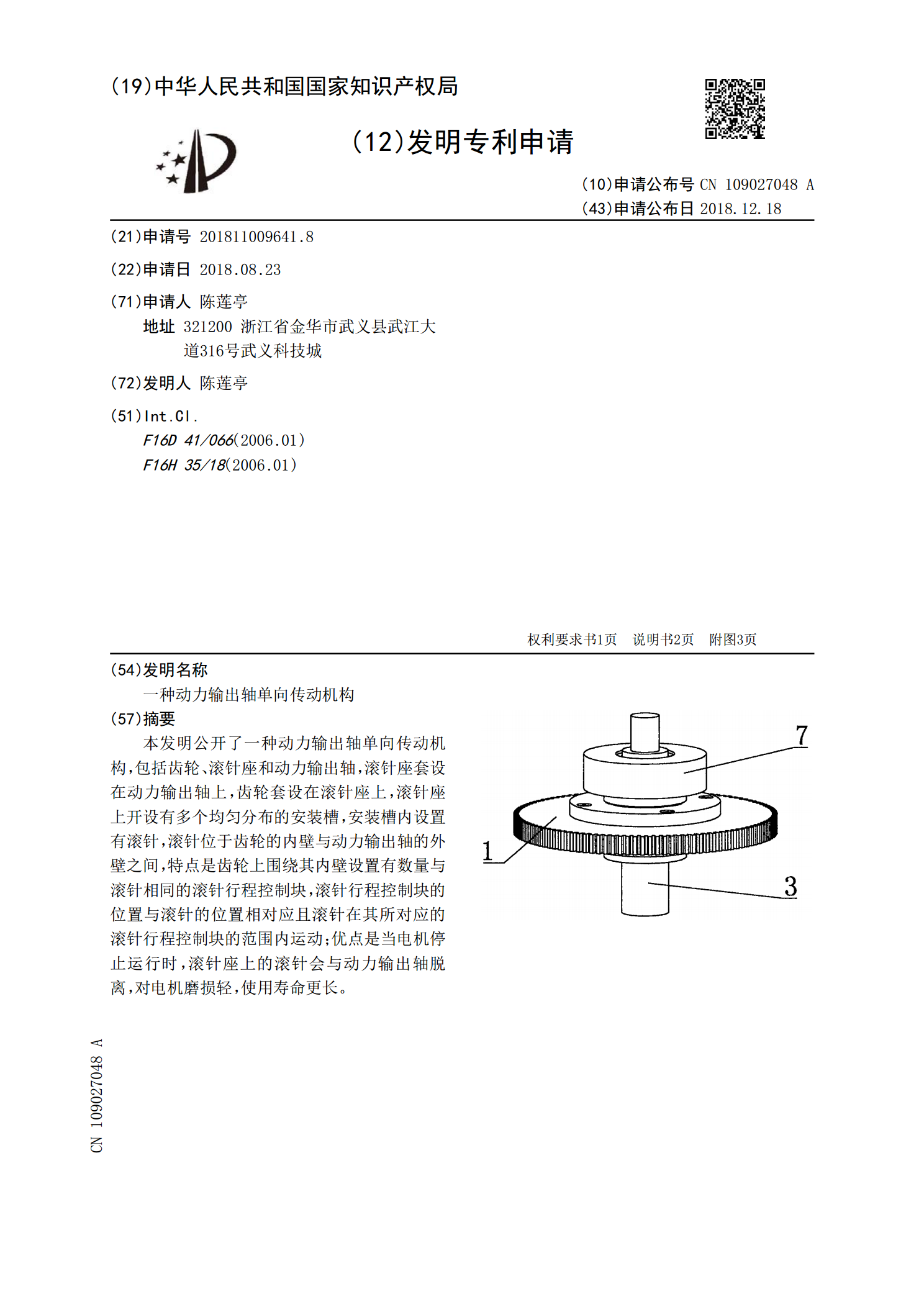
本发明公开了一种动力输出轴单向传动机构,包括齿轮、滚针座和动力输出轴,滚针座套设在动力输出轴上,齿轮套设在滚针座上,滚针座上开设有多个均匀分布的安装槽,安装槽内设置有滚针,滚针位于齿轮的内壁与动力输出轴的外壁之间,特点是齿轮上围绕其内壁设置有数量与滚针相同的滚针行程控制块,滚针行程控制块的位置与滚针的位置相对应且滚针在其所对应的滚针行程控制块的范围内运动;优点是当电机停止运行时,滚针座上的滚针会与动力输出轴脱离,对电机磨损轻,使用寿命更长。