
一种基于管道段长度及管道连接器检测的管道内定位装置及定位方法.pdf

论文****酱吖

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于管道段长度及管道连接器检测的管道内定位装置及定位方法.pdf
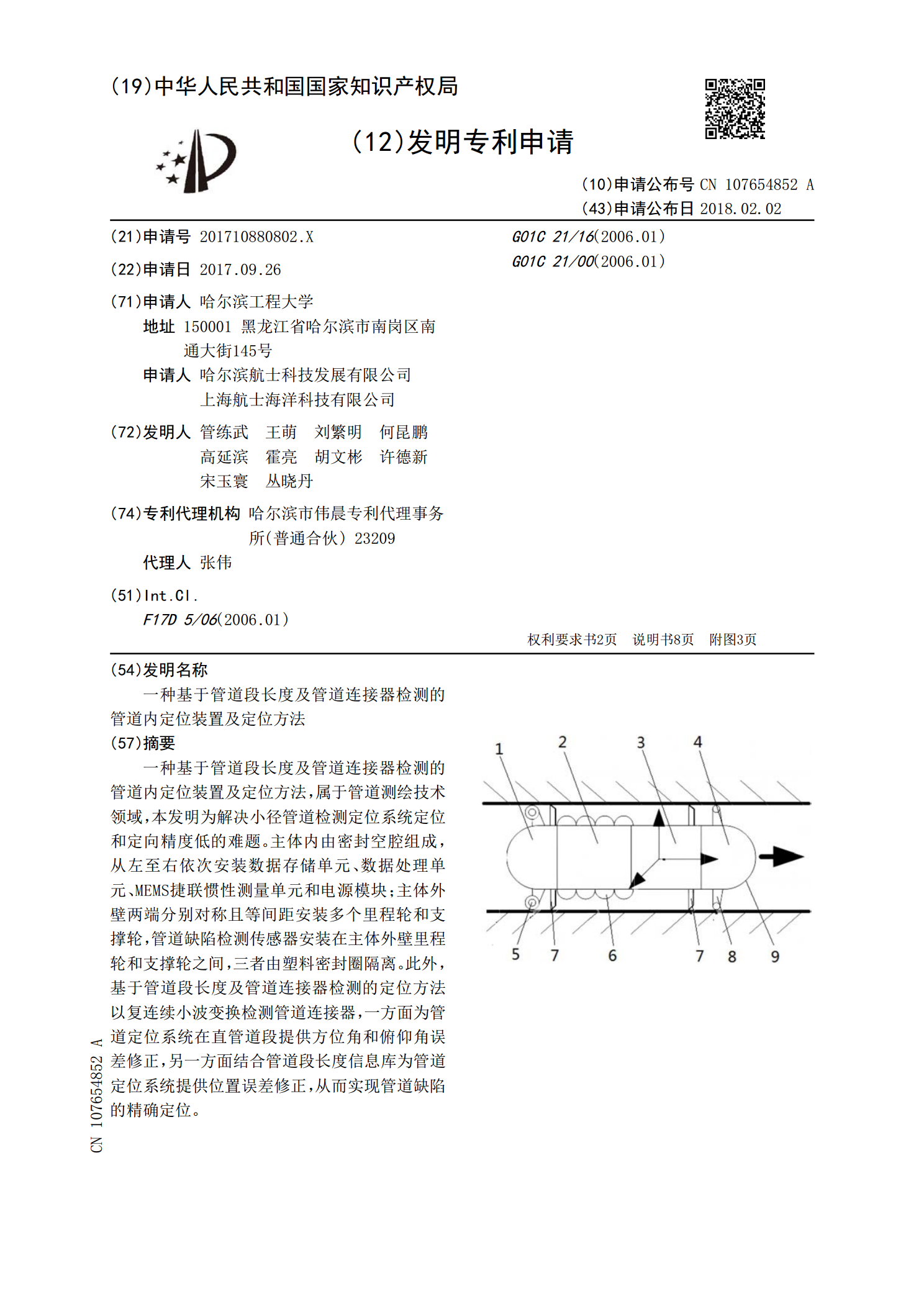
一种基于管道段长度及管道连接器检测的管道内定位装置及定位方法,属于管道测绘技术领域,本发明为解决小径管道检测定位系统定位和定向精度低的难题。主体内由密封空腔组成,从左至右依次安装数据存储单元、数据处理单元、MEMS捷联惯性测量单元和电源模块;主体外壁两端分别对称且等间距安装多个里程轮和支撑轮,管道缺陷检测传感器安装在主体外壁里程轮和支撑轮之间,三者由塑料密封圈隔离。此外,基于管道段长度及管道连接器检测的定位方法以复连续小波变换检测管道连接器,一方面为管道定位系统在直管道段提供方位角和俯仰角误差修正,另一方
便携式管道定位装置及管道定位方法.pdf
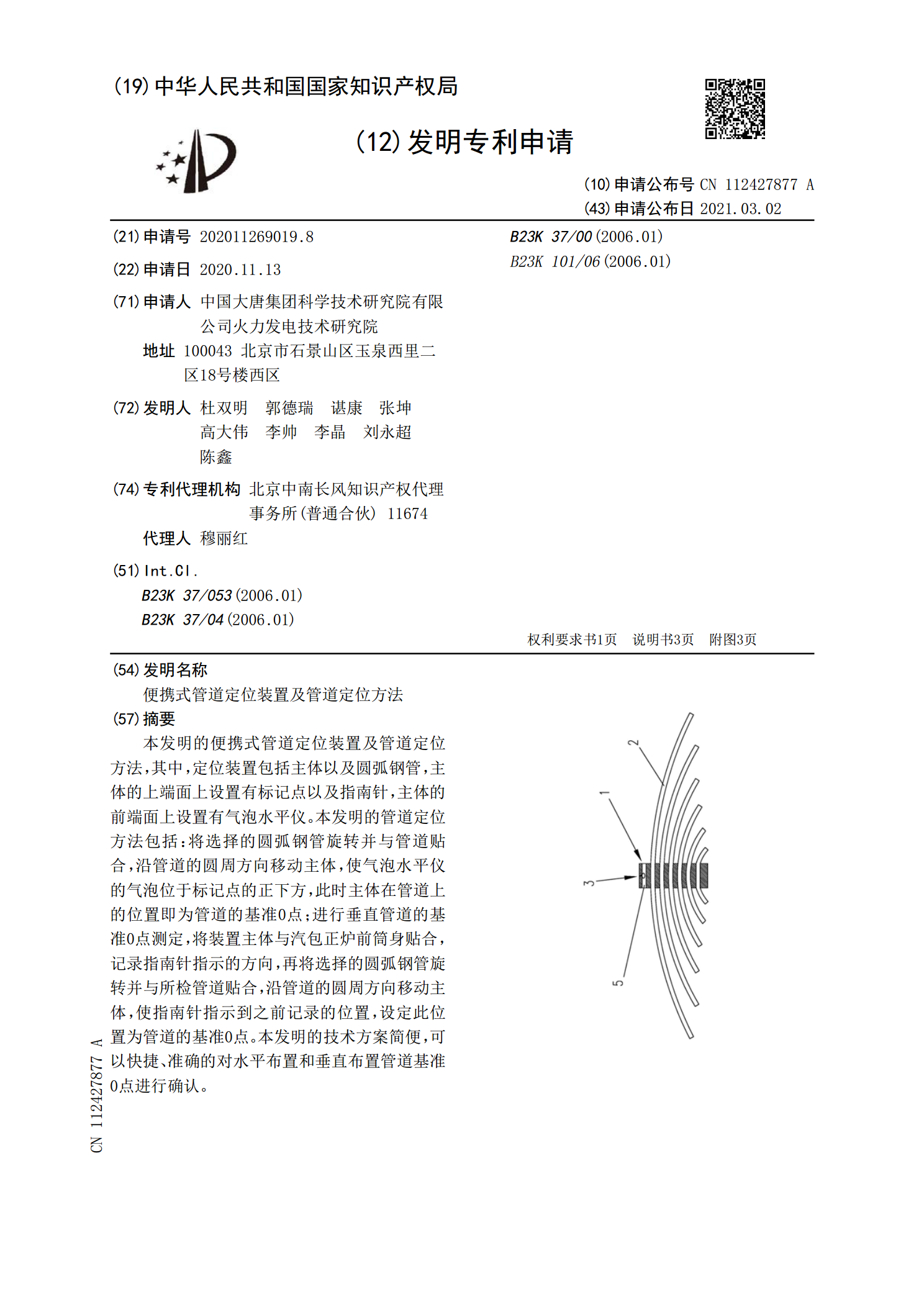
本发明的便携式管道定位装置及管道定位方法,其中,定位装置包括主体以及圆弧钢管,主体的上端面上设置有标记点以及指南针,主体的前端面上设置有气泡水平仪。本发明的管道定位方法包括:将选择的圆弧钢管旋转并与管道贴合,沿管道的圆周方向移动主体,使气泡水平仪的气泡位于标记点的正下方,此时主体在管道上的位置即为管道的基准0点;进行垂直管道的基准0点测定,将装置主体与汽包正炉前筒身贴合,记录指南针指示的方向,再将选择的圆弧钢管旋转并与所检管道贴合,沿管道的圆周方向移动主体,使指南针指示到之前记录的位置,设定此位置为管道的
一种管道检测用定位装置及定位方法.pdf
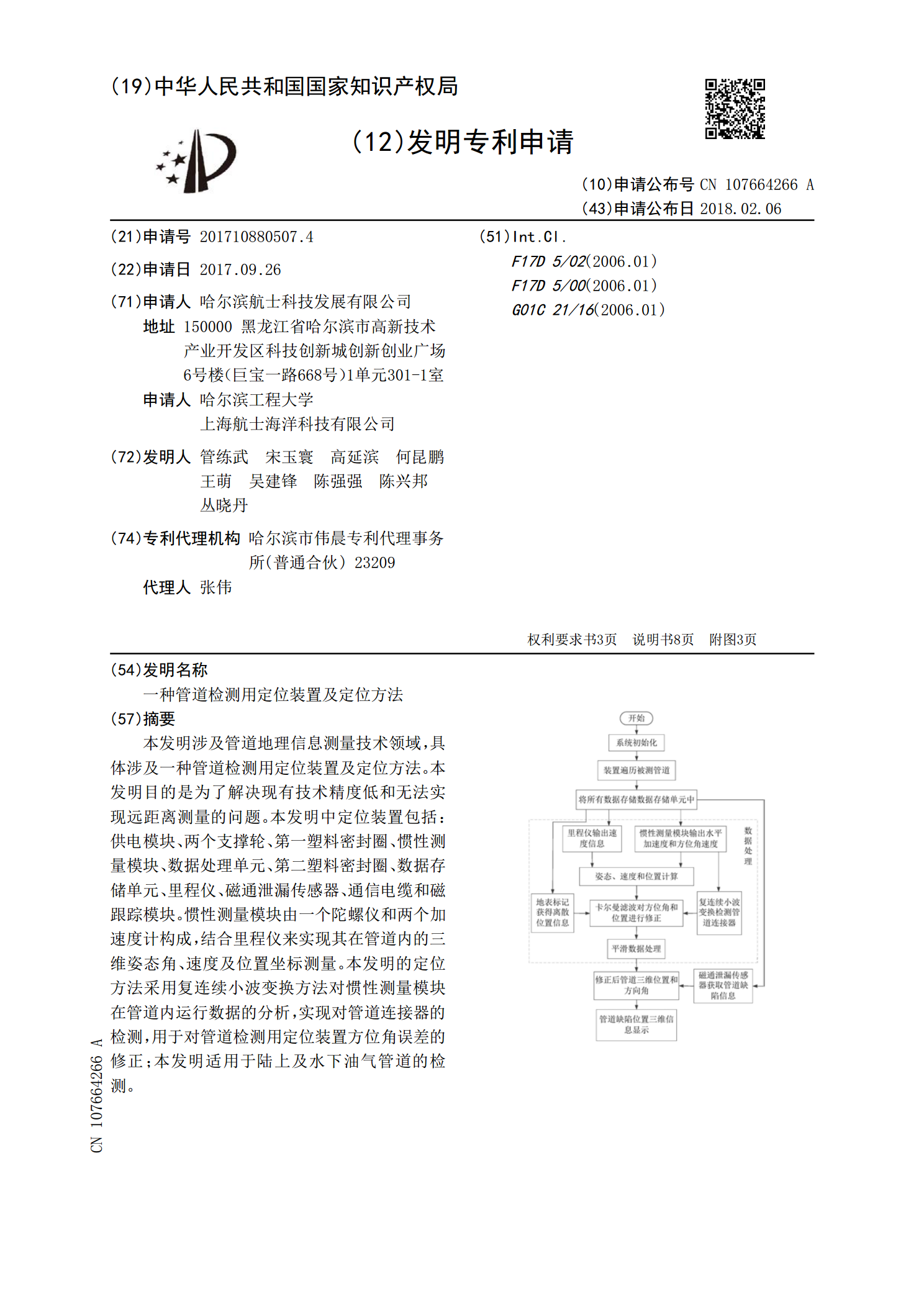
本发明涉及管道地理信息测量技术领域,具体涉及一种管道检测用定位装置及定位方法。本发明目的是为了解决现有技术精度低和无法实现远距离测量的问题。本发明中定位装置包括:供电模块、两个支撑轮、第一塑料密封圈、惯性测量模块、数据处理单元、第二塑料密封圈、数据存储单元、里程仪、磁通泄漏传感器、通信电缆和磁跟踪模块。惯性测量模块由一个陀螺仪和两个加速度计构成,结合里程仪来实现其在管道内的三维姿态角、速度及位置坐标测量。本发明的定位方法采用复连续小波变换方法对惯性测量模块在管道内运行数据的分析,实现对管道连接器的检测,用
一种基于管道内检测器的定位系统及方法.pdf
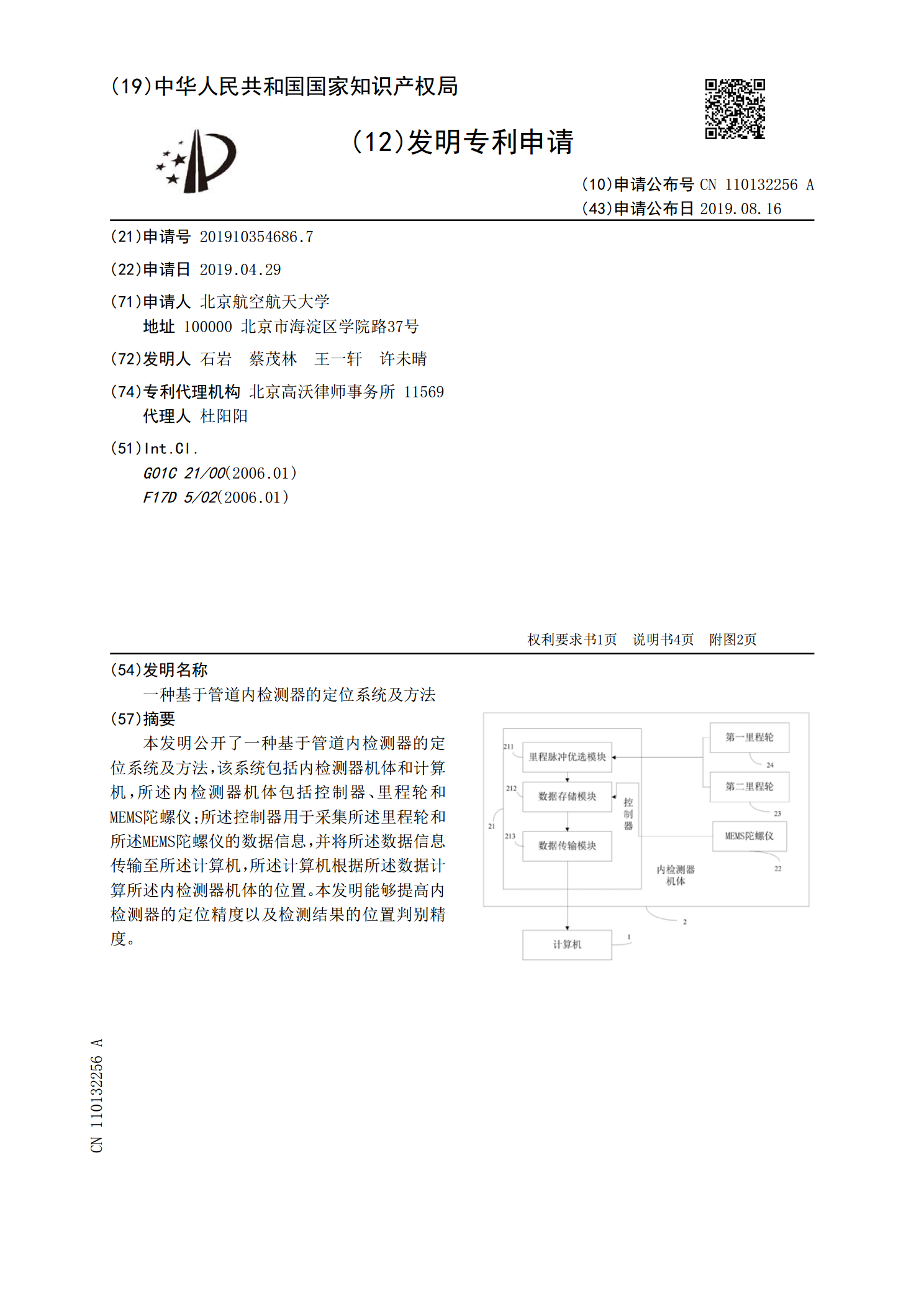
本发明公开了一种基于管道内检测器的定位系统及方法,该系统包括内检测器机体和计算机,所述内检测器机体包括控制器、里程轮和MEMS陀螺仪;所述控制器用于采集所述里程轮和所述MEMS陀螺仪的数据信息,并将所述数据信息传输至所述计算机,所述计算机根据所述数据计算所述内检测器机体的位置。本发明能够提高内检测器的定位精度以及检测结果的位置判别精度。
一种用于管道内检测器的定位装置.pdf
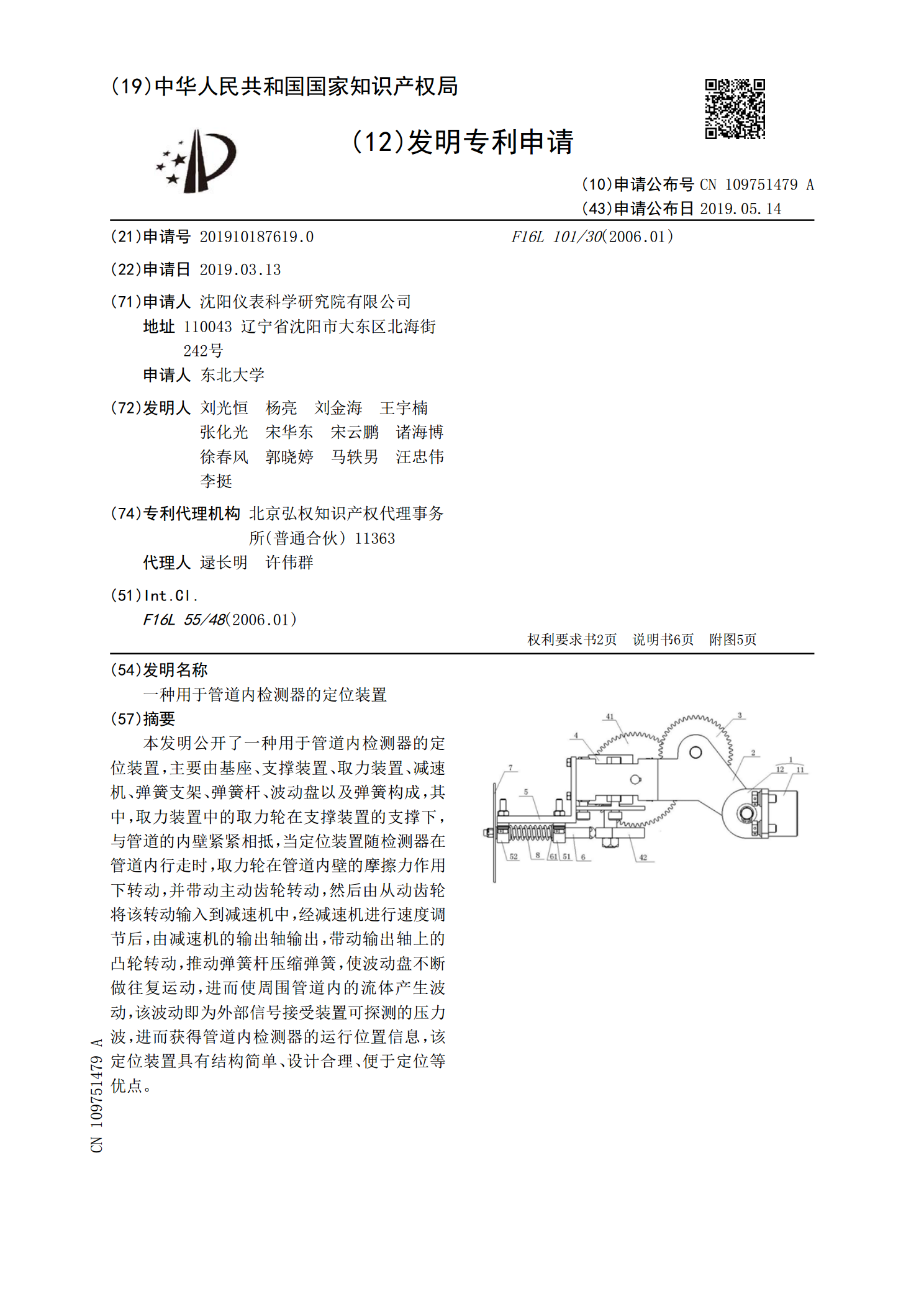
本发明公开了一种用于管道内检测器的定位装置,主要由基座、支撑装置、取力装置、减速机、弹簧支架、弹簧杆、波动盘以及弹簧构成,其中,取力装置中的取力轮在支撑装置的支撑下,与管道的内壁紧紧相抵,当定位装置随检测器在管道内行走时,取力轮在管道内壁的摩擦力作用下转动,并带动主动齿轮转动,然后由从动齿轮将该转动输入到减速机中,经减速机进行速度调节后,由减速机的输出轴输出,带动输出轴上的凸轮转动,推动弹簧杆压缩弹簧,使波动盘不断做往复运动,进而使周围管道内的流体产生波动,该波动即为外部信号接受装置可探测的压力波,进而获