
自动紧急制动方法及系统.pdf

雨巷****轶丽


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自动紧急制动方法及系统.pdf
本发明涉及车辆紧急制动领域,具体涉及一种自动紧急制动方法及系统。该方法包括:实时检测是否有紧急制动信号;如果是,获取车辆轮速并根据所述轮速计算当前车速;判断当前车速是否大于设定安全车速值;如果是,控制车辆进入紧急制动模式;否则,控制所述驻车执行器以平地力驻车。通过本发明,提高了车辆制动的安全性。

自动紧急制动系统及其控制方法.pdf
本发明涉及自动紧急制动系统及其控制方法,利用通过雷达传感器来检测的信息,并以自动方式执行紧急制动。本发明的自动紧急制动系统包括雷达传感器和电子控制单元。上述雷达传感器发送电波,并接收从车辆前方的物体反射回来的反射波来检测车辆前方的物体。上述电子控制单元从上述雷达传感器接收的物体检测信息,根据所接收到的上述物体检测信息,且预先设定的距离以内物体检测次数为预先设定的次数以上,则中止或保留自动紧急制动。

用于自动紧急制动的系统和方法.pdf
本发明公开了一种在车辆中实现的行人跟踪系统。该系统基于车辆的位置和速度因素以及行人的位置和速度参数来估计车辆和行人的轨迹。基于车辆和行人轨迹的估计,进而估计车辆和行人的交叉点。同时,该系统基于所估计的交叉点预估发生碰撞的时间,并确定行人在车辆路径中的轨迹。此外,该系统评估碰撞风险以选择行人作为目标,并基于所选择的目标生成减速驱动指令以使车辆减速,该减速驱动指令同时提供给自动紧急制动(AEB)驱动单元。
自动紧急制动数据采集方法、系统及车辆.pdf
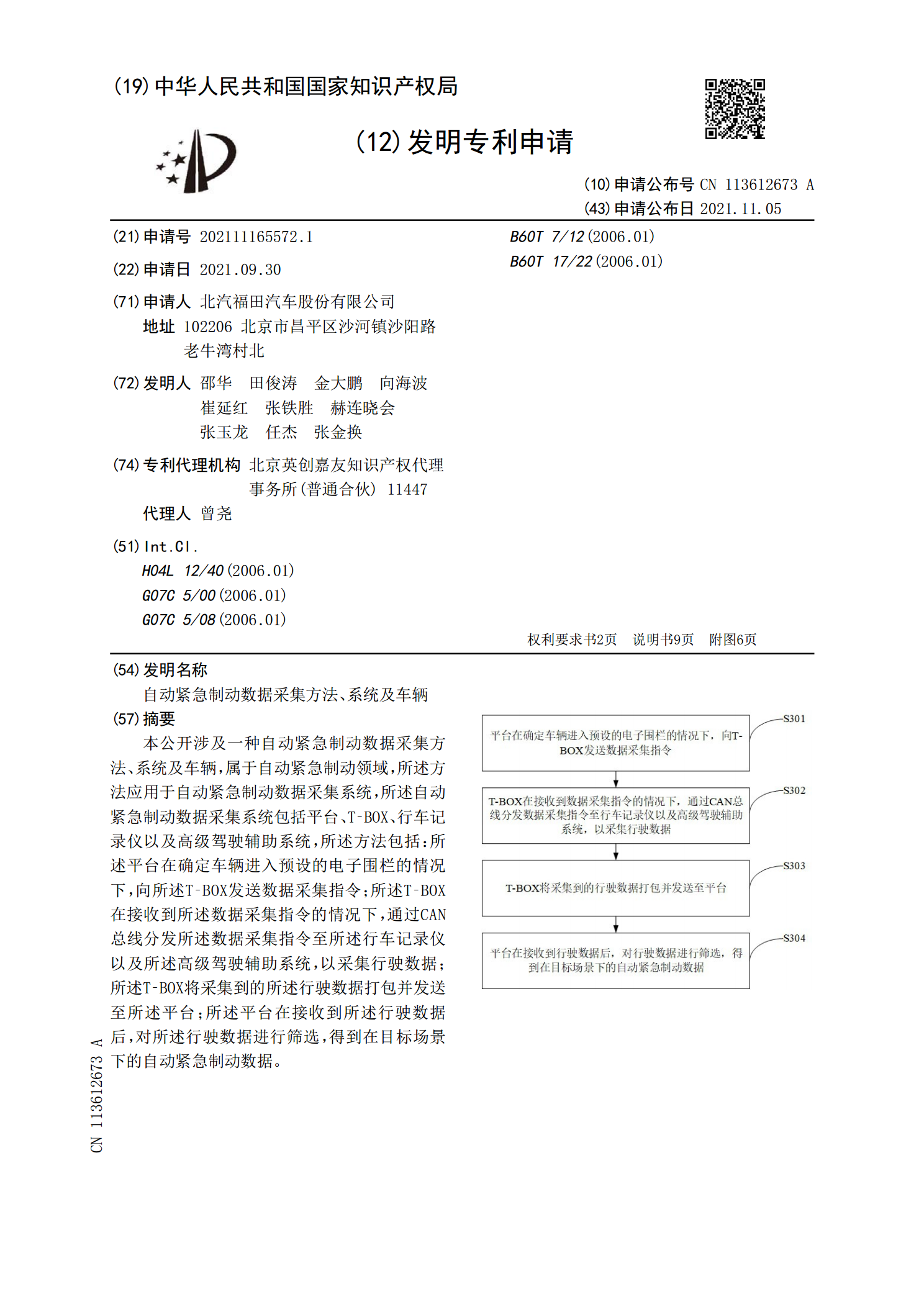
本公开涉及一种自动紧急制动数据采集方法、系统及车辆,属于自动紧急制动领域,所述方法应用于自动紧急制动数据采集系统,所述自动紧急制动数据采集系统包括平台、T‑BOX、行车记录仪以及高级驾驶辅助系统,所述方法包括:所述平台在确定车辆进入预设的电子围栏的情况下,向所述T‑BOX发送数据采集指令;所述T‑BOX在接收到所述数据采集指令的情况下,通过CAN总线分发所述数据采集指令至所述行车记录仪以及所述高级驾驶辅助系统,以采集行驶数据;所述T‑BOX将采集到的所述行驶数据打包并发送至所述平台;所述平台在接收到所述行

自动紧急制动系统.ppt
目录content3456789四、总结五、参考文献谢谢观看!欢迎老师同学批评指正