
一种满足火箭发动机涡轮泵装配及使用的高速动平衡方法.pdf

飞飙****ng


1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种满足火箭发动机涡轮泵装配及使用的高速动平衡方法.pdf
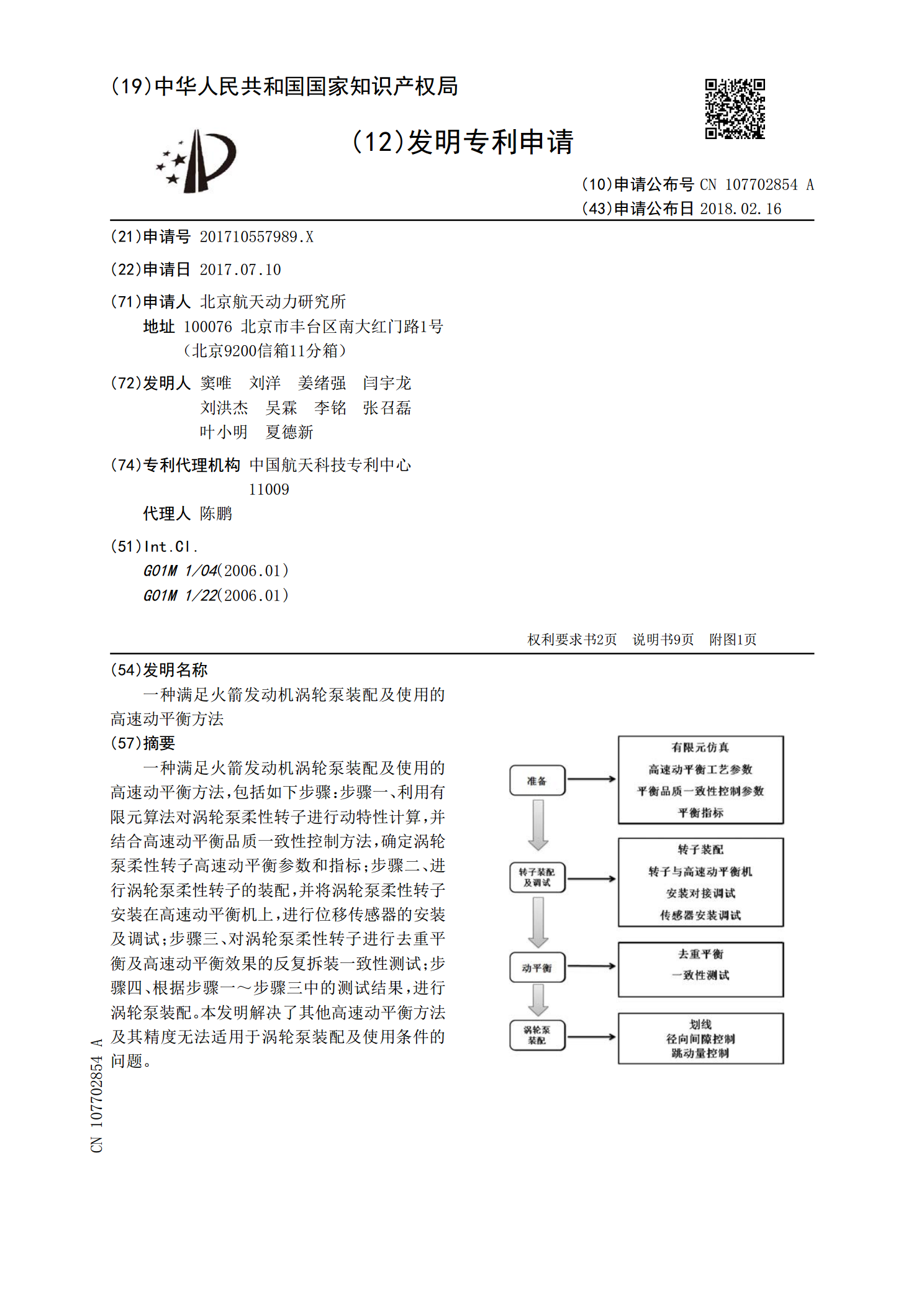
一种满足火箭发动机涡轮泵装配及使用的高速动平衡方法,包括如下步骤:步骤一、利用有限元算法对涡轮泵柔性转子进行动特性计算,并结合高速动平衡品质一致性控制方法,确定涡轮泵柔性转子高速动平衡参数和指标;步骤二、进行涡轮泵柔性转子的装配,并将涡轮泵柔性转子安装在高速动平衡机上,进行位移传感器的安装及调试;步骤三、对涡轮泵柔性转子进行去重平衡及高速动平衡效果的反复拆装一致性测试;步骤四、根据步骤一~步骤三中的测试结果,进行涡轮泵装配。本发明解决了其他高速动平衡方法及其精度无法适用于涡轮泵装配及使用条件的问题。
一种液体火箭发动机涡轮泵柔性转子高速动平衡支承装置.pdf
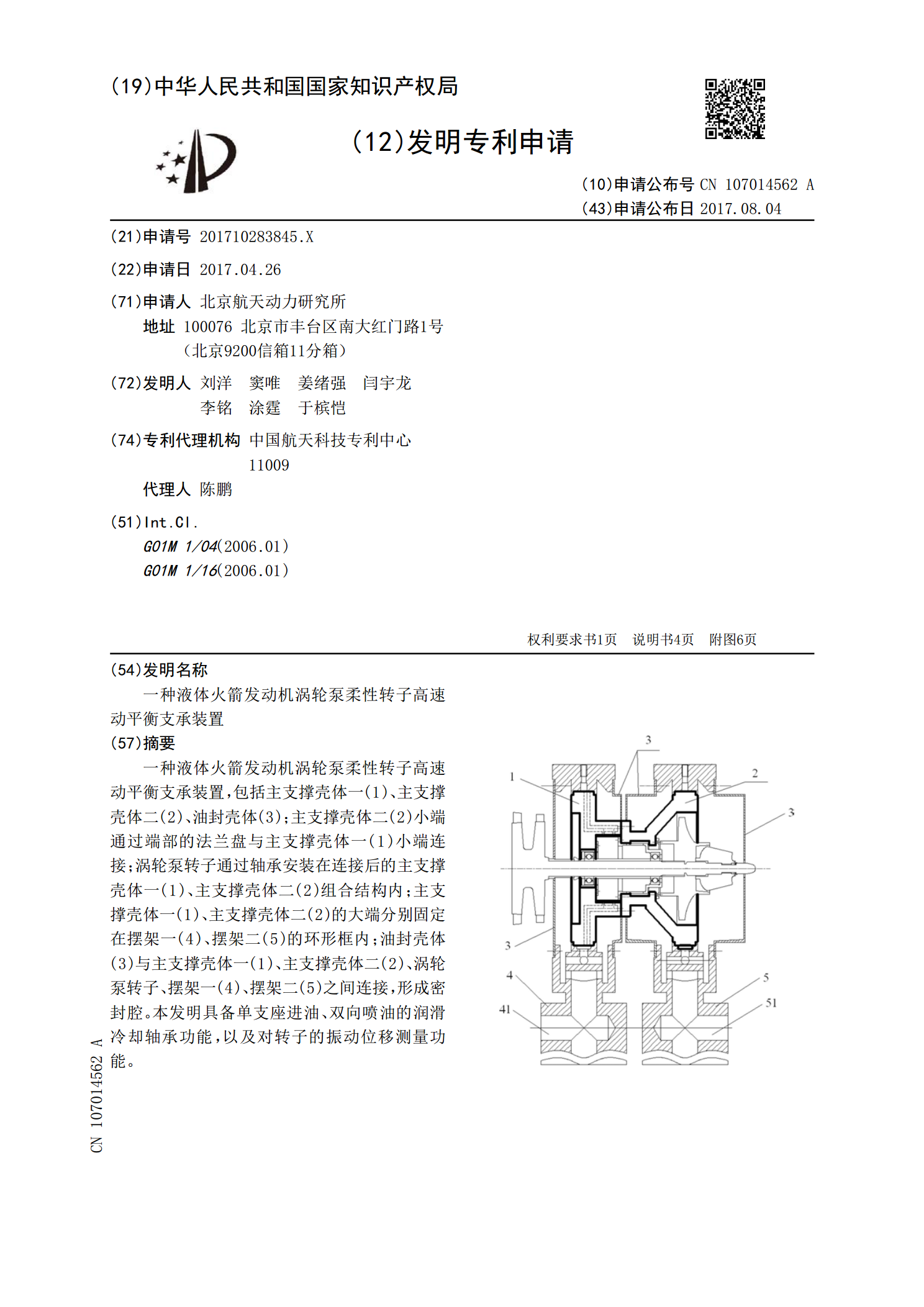
一种液体火箭发动机涡轮泵柔性转子高速动平衡支承装置,包括主支撑壳体一(1)、主支撑壳体二(2)、油封壳体(3);主支撑壳体二(2)小端通过端部的法兰盘与主支撑壳体一(1)小端连接;涡轮泵转子通过轴承安装在连接后的主支撑壳体一(1)、主支撑壳体二(2)组合结构内;主支撑壳体一(1)、主支撑壳体二(2)的大端分别固定在摆架一(4)、摆架二(5)的环形框内;油封壳体(3)与主支撑壳体一(1)、主支撑壳体二(2)、涡轮泵转子、摆架一(4)、摆架二(5)之间连接,形成密封腔。本发明具备单支座进油、双向喷油的润滑冷却

液体火箭发动机涡轮泵转子的新型动平衡方法研究.docx
液体火箭发动机涡轮泵转子的新型动平衡方法研究液体火箭发动机是一种高能动力装置,其发动机中的涡轮泵是一个十分重要的部件,具有转速高、承受负载大等特点。然而,转子的不平衡会导致结构强度下降、寿命缩短、性能降低、噪声污染和安全隐患等诸多问题。因此,研究新型动平衡方法对于液体火箭发动机的可靠运行和提高发动机性能具有重要意义。传统的动平衡方法,如静、动平衡和飞轮旋转、中心位移法等,存在着操作难度大、测量不准确、时间久等问题。因此,研究新型动平衡方法成为了我们所关注的重点。一种新型动平衡方法是动态平衡算法。该方法是在
火箭发动机盘轴一体涡轮泵转子高速动平衡驱动联接装置.pdf
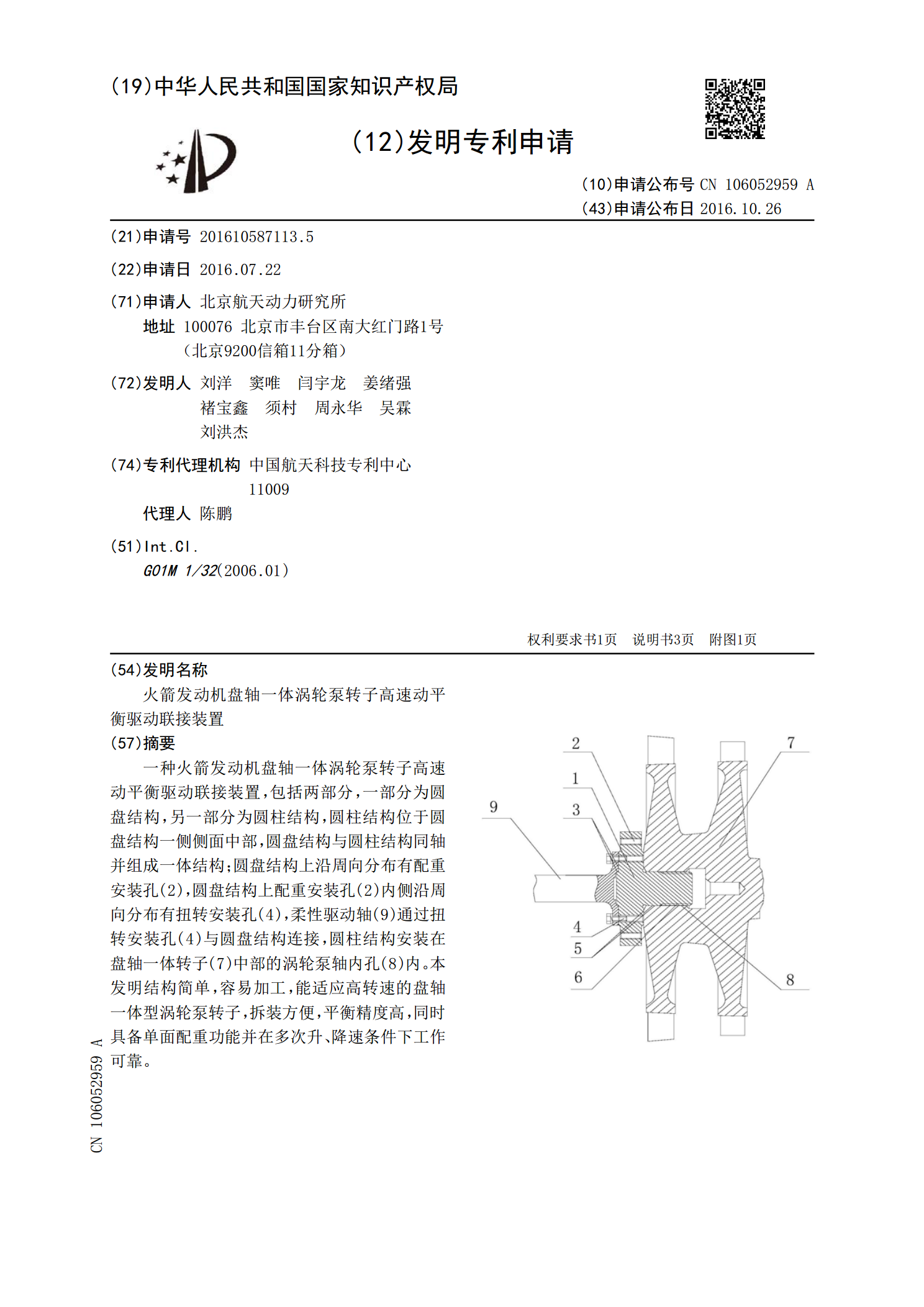
一种火箭发动机盘轴一体涡轮泵转子高速动平衡驱动联接装置,包括两部分,一部分为圆盘结构,另一部分为圆柱结构,圆柱结构位于圆盘结构一侧侧面中部,圆盘结构与圆柱结构同轴并组成一体结构;圆盘结构上沿周向分布有配重安装孔(2),圆盘结构上配重安装孔(2)内侧沿周向分布有扭转安装孔(4),柔性驱动轴(9)通过扭转安装孔(4)与圆盘结构连接,圆柱结构安装在盘轴一体转子(7)中部的涡轮泵轴内孔(8)内。本发明结构简单,容易加工,能适应高转速的盘轴一体型涡轮泵转子,拆装方便,平衡精度高,同时具备单面配重功能并在多次升、降速
一种涡轮泵柔性转子高速动平衡品质一致性控制方法.pdf
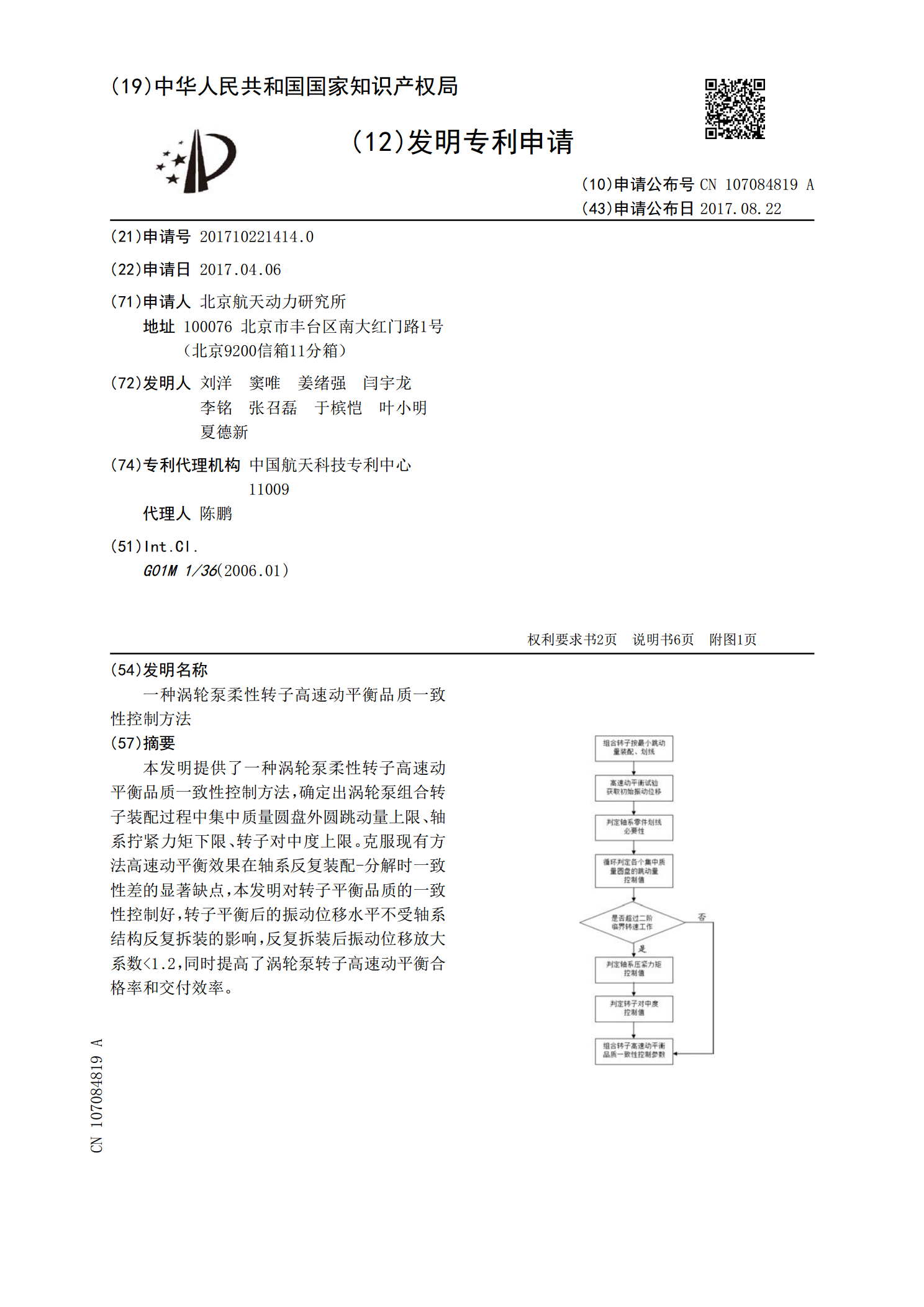
本发明提供了一种涡轮泵柔性转子高速动平衡品质一致性控制方法,确定出涡轮泵组合转子装配过程中集中质量圆盘外圆跳动量上限、轴系拧紧力矩下限、转子对中度上限。克服现有方法高速动平衡效果在轴系反复装配‑分解时一致性差的显著缺点,本发明对转子平衡品质的一致性控制好,转子平衡后的振动位移水平不受轴系结构反复拆装的影响,反复拆装后振动位移放大系数