
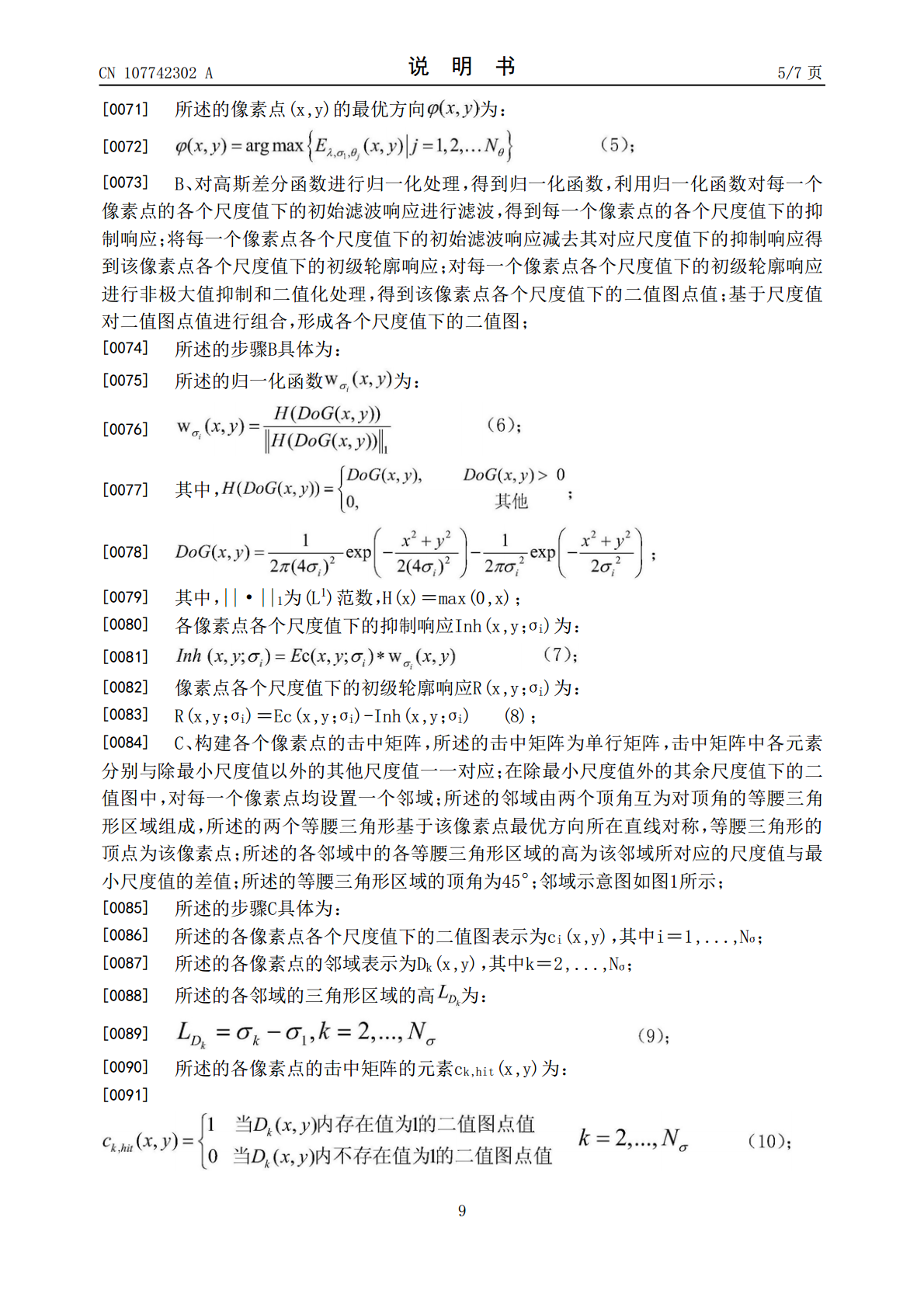
基于初级视皮层多尺度轮廓融合的轮廓检测方法.pdf

甲申****66

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于初级视皮层多尺度轮廓融合的轮廓检测方法.pdf
本发明旨在提供一种基于初级视皮层多尺度轮廓融合的轮廓检测方法,包括以下步骤:A、输入经灰度处理的待检测图像,预设Gabor滤波器组进行滤波得到各像素点各个尺度值下的初始滤波响应和最优方向;B、计算各像素点各个尺度值下的抑制响应,进而得到各像素点各个尺度值下的初级轮廓响及二值图点值;C、构建各像素点的击中矩阵和以该像素点为中心的多个邻域,根据邻域计算得到各像素点的击中矩阵的元素值;D、将各尺度值代入正态分布函数,得到各尺度值的权重函数值;进而计算得到该像素点的终极轮廓响应;E、对各像素点的终极轮廓响应进行处
基于初级视觉皮层固视微动机制的轮廓检测方法.pdf
本发明旨在提供一种基于初级视觉皮层固视微动机制的轮廓检测方法,包括以下步骤:A、输入经灰度处理得到的待检测图像,预设多个方向参数的高斯一阶导函数,预设高斯一阶导函数的模板中心的轴向偏移量,预设四个高斯一阶导函数的偏移中心,计算得到对应的四个高斯一阶导偏移函数;B、对于待检测图像的各像素点,计算得到各像素点的经典感受野响应;C、预设距离权重函数、抑制系数,计算得到各个像素点的抑制响应;D、将各个像素点的经典感受野响应减去该像素点的抑制响应,得到各像素点的轮廓响应,进而得到最终轮廓图。该轮廓检测方法克服现有技
基于尺度线索抑制的轮廓检测方法.pdf
本发明旨在提供一种基于尺度线索抑制的轮廓检测方法,包括以下步骤:A、输入经灰度处理的待检测图像,预设抑制强度,预设均分圆周的多个方向参数,进行二维高斯一阶导函数滤波,获得各像素点的经典感受野刺激响应;B、预设高斯差分函数并进行归一化处理,得到归一化的高斯差分滤波函数;C、利用归一化的高斯差分滤波函数分别计算各像素点的归一化高斯差分滤波值;D、预设尺度线索的高尺度值、低尺度值,预设阈值,确定各像素点的尺度线索;E、分别计算各像素点的抑制响应;将各像素点的经典感受野刺激响应减去该像素点的抑制响应并进行处理得到
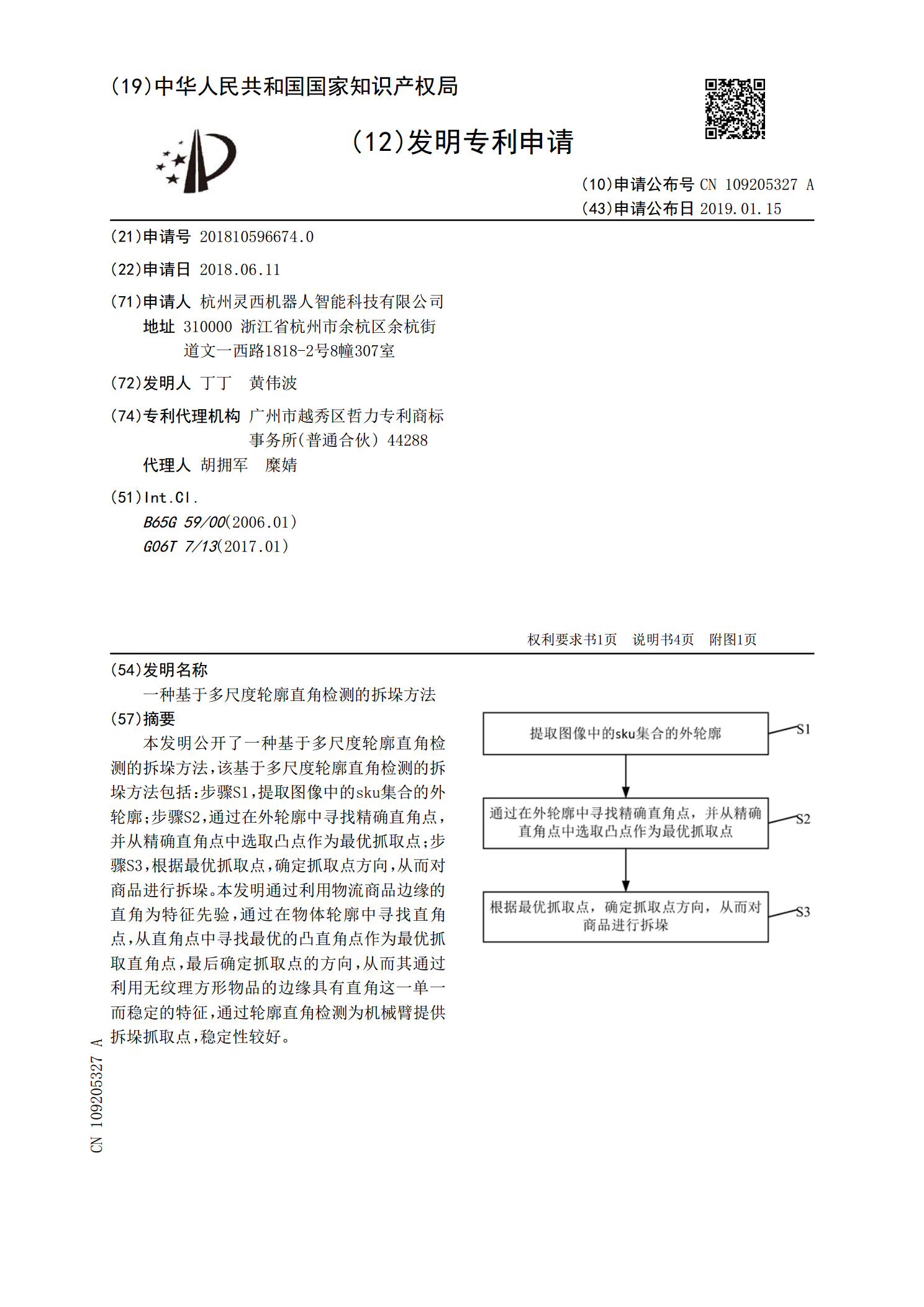
一种基于多尺度轮廓直角检测的拆垛方法.pdf
本发明公开了一种基于多尺度轮廓直角检测的拆垛方法,该基于多尺度轮廓直角检测的拆垛方法包括:步骤S1,提取图像中的sku集合的外轮廓;步骤S2,通过在外轮廓中寻找精确直角点,并从精确直角点中选取凸点作为最优抓取点;步骤S3,根据最优抓取点,确定抓取点方向,从而对商品进行拆垛。本发明通过利用物流商品边缘的直角为特征先验,通过在物体轮廓中寻找直角点,从直角点中寻找最优的凸直角点作为最优抓取直角点,最后确定抓取点的方向,从而其通过利用无纹理方形物品的边缘具有直角这一单一而稳定的特征,通过轮廓直角检测为机械臂提供拆
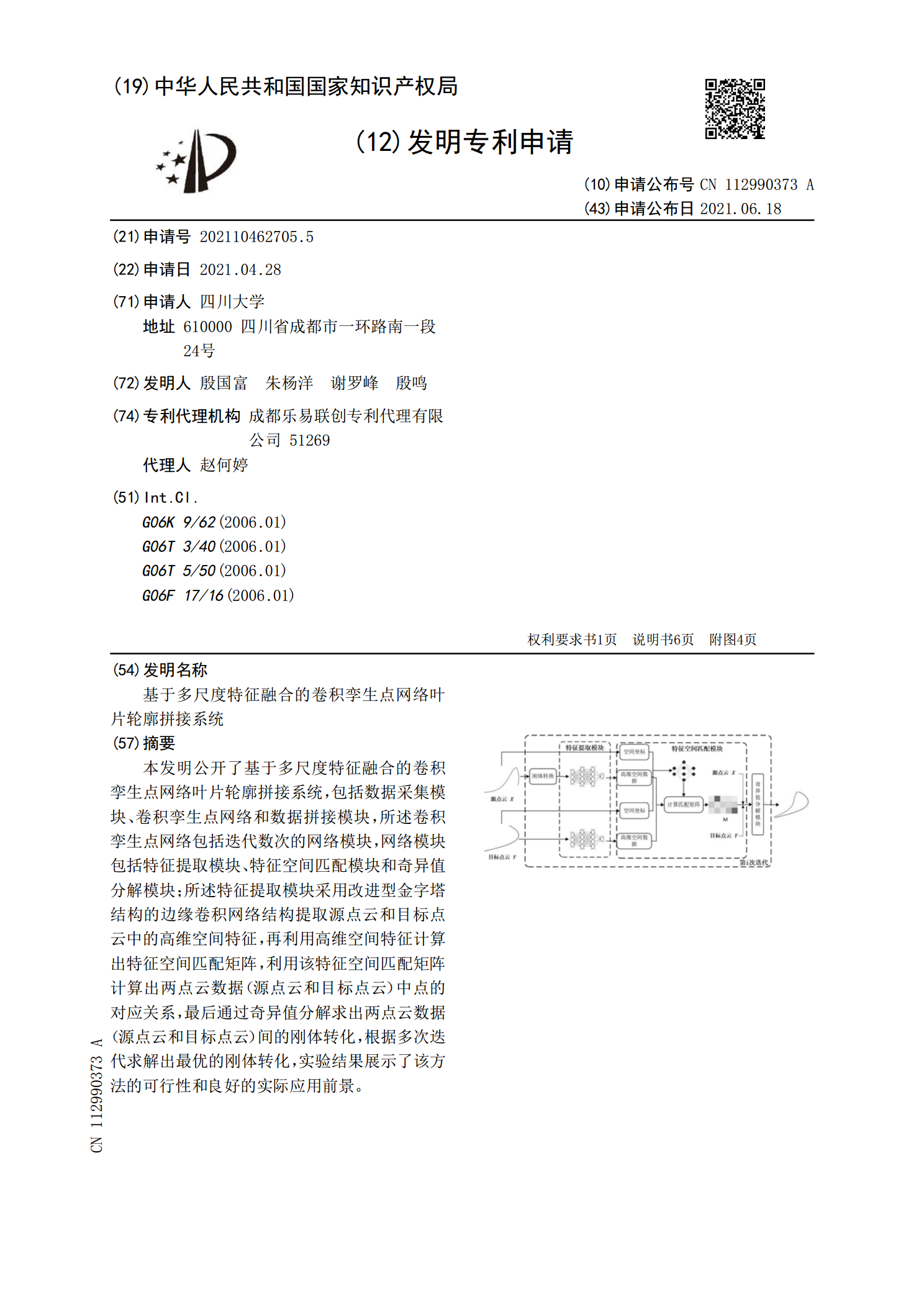
基于多尺度特征融合的卷积孪生点网络叶片轮廓拼接系统.pdf
本发明公开了基于多尺度特征融合的卷积孪生点网络叶片轮廓拼接系统,包括数据采集模块、卷积孪生点网络和数据拼接模块,所述卷积孪生点网络包括迭代数次的网络模块,网络模块包括特征提取模块、特征空间匹配模块和奇异值分解模块;所述特征提取模块采用改进型金字塔结构的边缘卷积网络结构提取源点云和目标点云中的高维空间特征,再利用高维空间特征计算出特征空间匹配矩阵,利用该特征空间匹配矩阵计算出两点云数据(源点云和目标点云)中点的对应关系,最后通过奇异值分解求出两点云数据(源点云和目标点云)间的刚体转化,根据多次迭代求解出最优