
人字齿行星齿轮箱.pdf

努力****凌芹


1/5

2/5

3/5

4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
人字齿行星齿轮箱.pdf
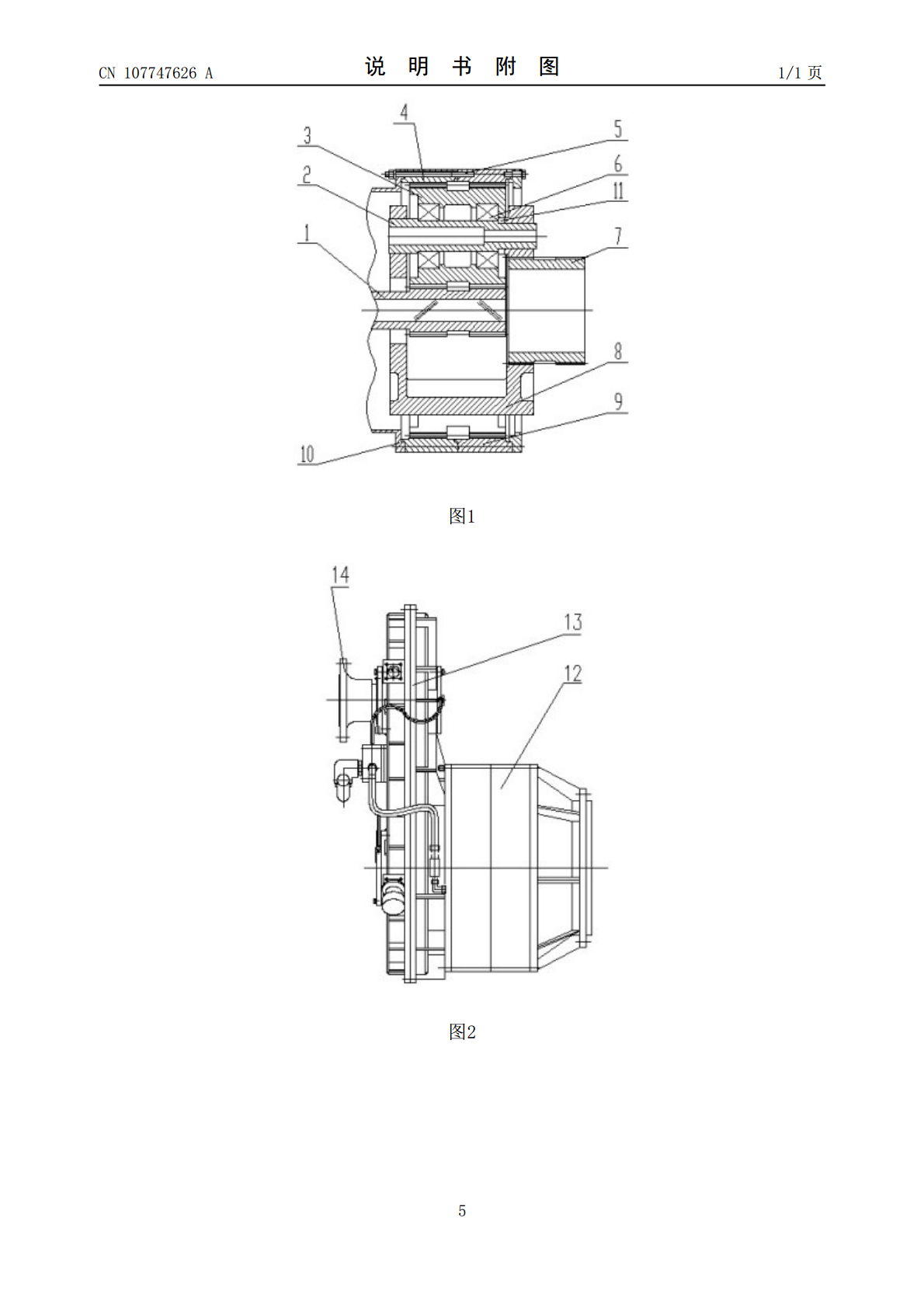
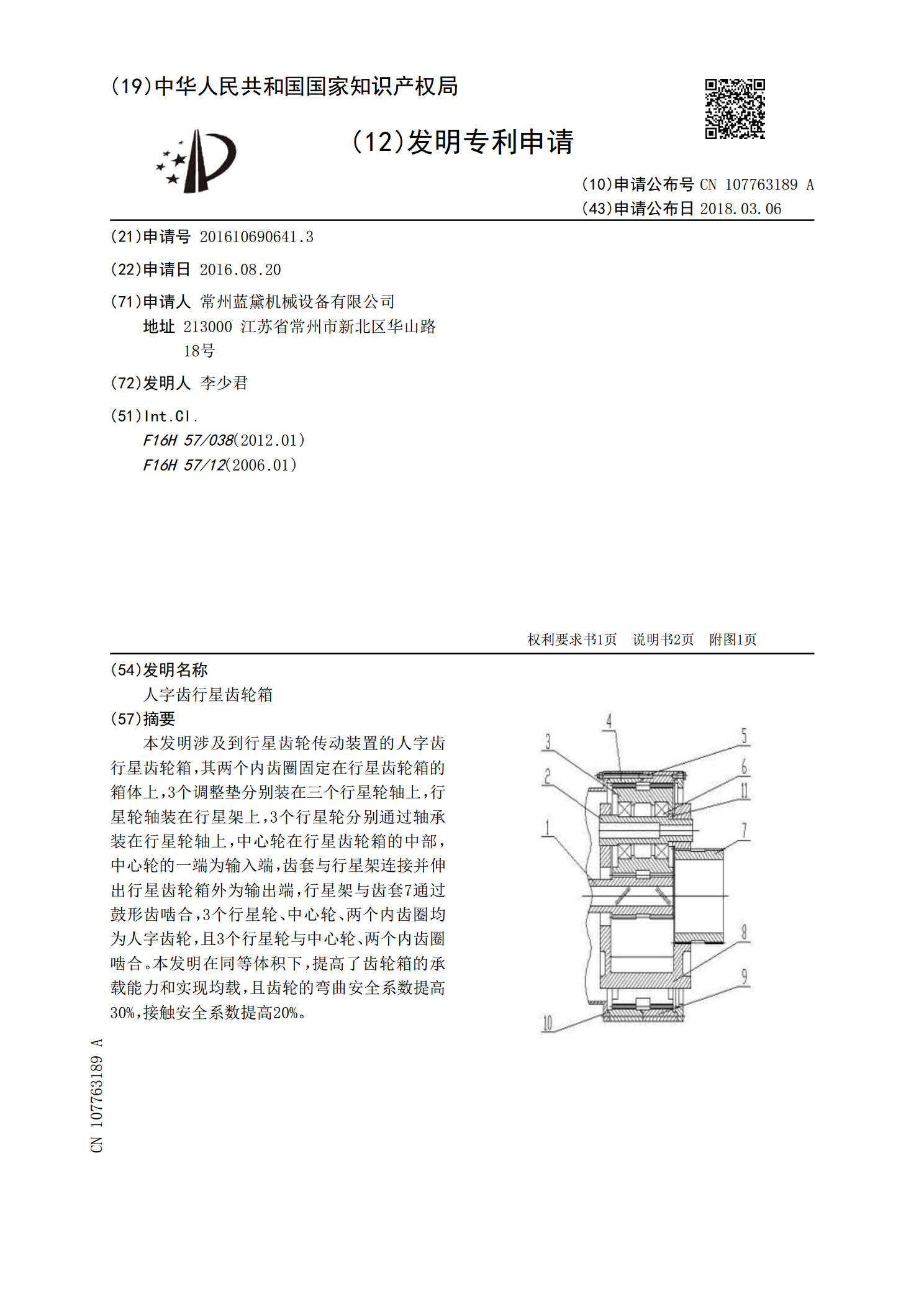
本发明涉及到行星齿轮传动装置的人字齿行星齿轮箱,其两个内齿圈固定在行星齿轮箱的箱体上,3个调整垫分别装在三个行星轮轴上,行星轮轴装在行星架上,3个行星轮分别通过轴承装在行星轮轴上,中心轮在行星齿轮箱的中部,中心轮的一端为输入端,齿套与行星架连接并伸出行星齿轮箱外为输出端,行星架与齿套7通过鼓形齿啮合,3个行星轮、中心轮、两个内齿圈均为人字齿轮,且3个行星轮与中心轮、两个内齿圈啮合。本发明在同等体积下,提高了齿轮箱的承载能力和实现均载,且齿轮的弯曲安全系数提高30%,接触安全系数提高20%。
人字齿行星齿轮箱.pdf
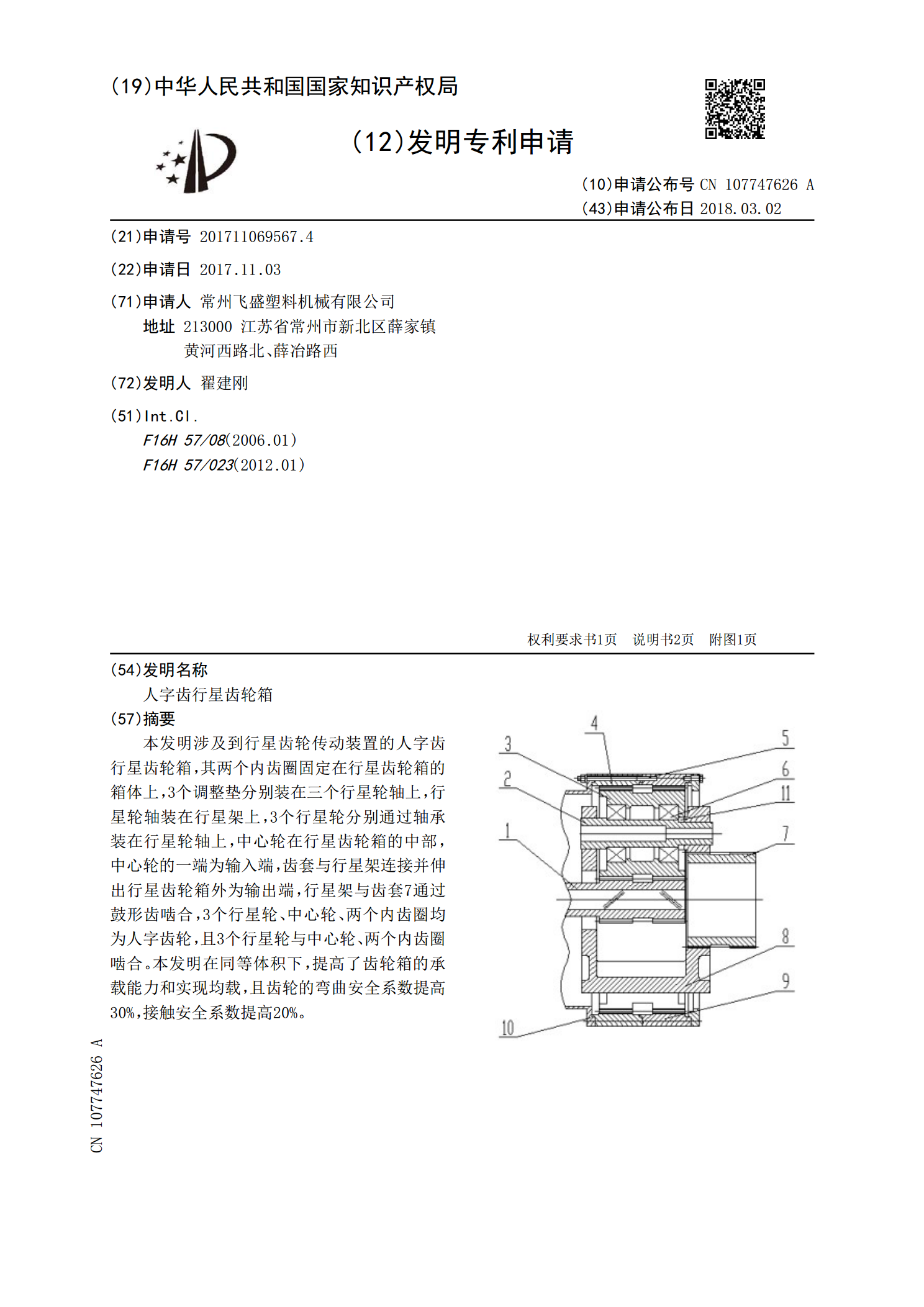
本发明涉及到行星齿轮传动装置的人字齿行星齿轮箱,其两个内齿圈固定在行星齿轮箱的箱体上,3个调整垫分别装在三个行星轮轴上,行星轮轴装在行星架上,3个行星轮分别通过轴承装在行星轮轴上,中心轮在行星齿轮箱的中部,中心轮的一端为输入端,齿套与行星架连接并伸出行星齿轮箱外为输出端,行星架与齿套7通过鼓形齿啮合,3个行星轮、中心轮、两个内齿圈均为人字齿轮,且3个行星轮与中心轮、两个内齿圈啮合。本发明在同等体积下,提高了齿轮箱的承载能力和实现均载,且齿轮的弯曲安全系数提高30%,接触安全系数提高20%。

人字齿行星齿轮箱.pdf
本发明涉及到行星齿轮传动装置的人字齿行星齿轮箱,其两个内齿圈固定在行星齿轮箱的箱体上,3个调整垫分别装在三个行星轮轴上,行星轮轴装在行星架上,3个行星轮分别通过轴承装在行星轮轴上,中心轮在行星齿轮箱的中部,中心轮的一端为输入端,齿套与行星架连接并伸出行星齿轮箱外为输出端,行星架与齿套7通过鼓形齿啮合,3个行星轮、中心轮、两个内齿圈均为人字齿轮,且3个行星轮与中心轮、两个内齿圈啮合。本发明在同等体积下,提高了齿轮箱的承载能力和实现均载,且齿轮的弯曲安全系数提高30%,接触安全系数提高20%。

人字齿行星减速器.pdf
本发明公开了一种人字齿行星减速器,包括机壳、输入轴、输出轴以及由太阳轮、行星轮和内齿圈构成的行星齿轮副,其特征是,所述行星齿轮副中的太阳轮、行星轮和内齿圈中的齿为人字齿,所述内齿圈由沿圆周方向分为至少两节的齿圈节拼装而成。本发明采用多节分段式内齿圈结构,解决了实际生产中矿用提升绞车使用的立式承载传扭用的大功率减速机采用直齿、斜齿和人字齿存在的各种问题。本发明特别适合矿用提升绞车使用,还适用于各种大小型工程机械。
人字齿双分流齿轮箱.pdf
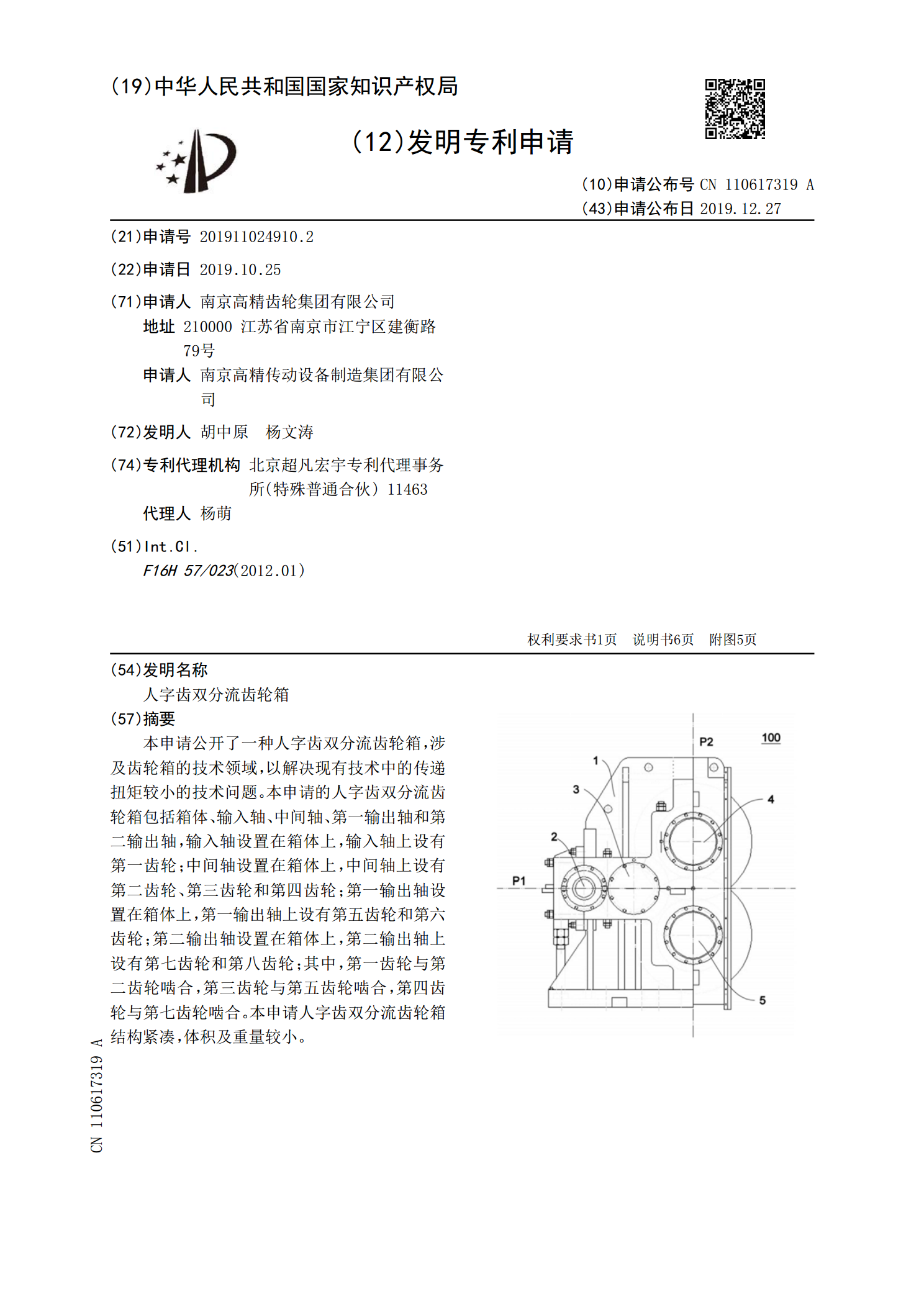
本申请公开了一种人字齿双分流齿轮箱,涉及齿轮箱的技术领域,以解决现有技术中的传递扭矩较小的技术问题。本申请的人字齿双分流齿轮箱包括箱体、输入轴、中间轴、第一输出轴和第二输出轴,输入轴设置在箱体上,输入轴上设有第一齿轮;中间轴设置在箱体上,中间轴上设有第二齿轮、第三齿轮和第四齿轮;第一输出轴设置在箱体上,第一输出轴上设有第五齿轮和第六齿轮;第二输出轴设置在箱体上,第二输出轴上设有第七齿轮和第八齿轮;其中,第一齿轮与第二齿轮啮合,第三齿轮与第五齿轮啮合,第四齿轮与第七齿轮啮合。本申请人字齿双分流齿轮箱结构紧凑