
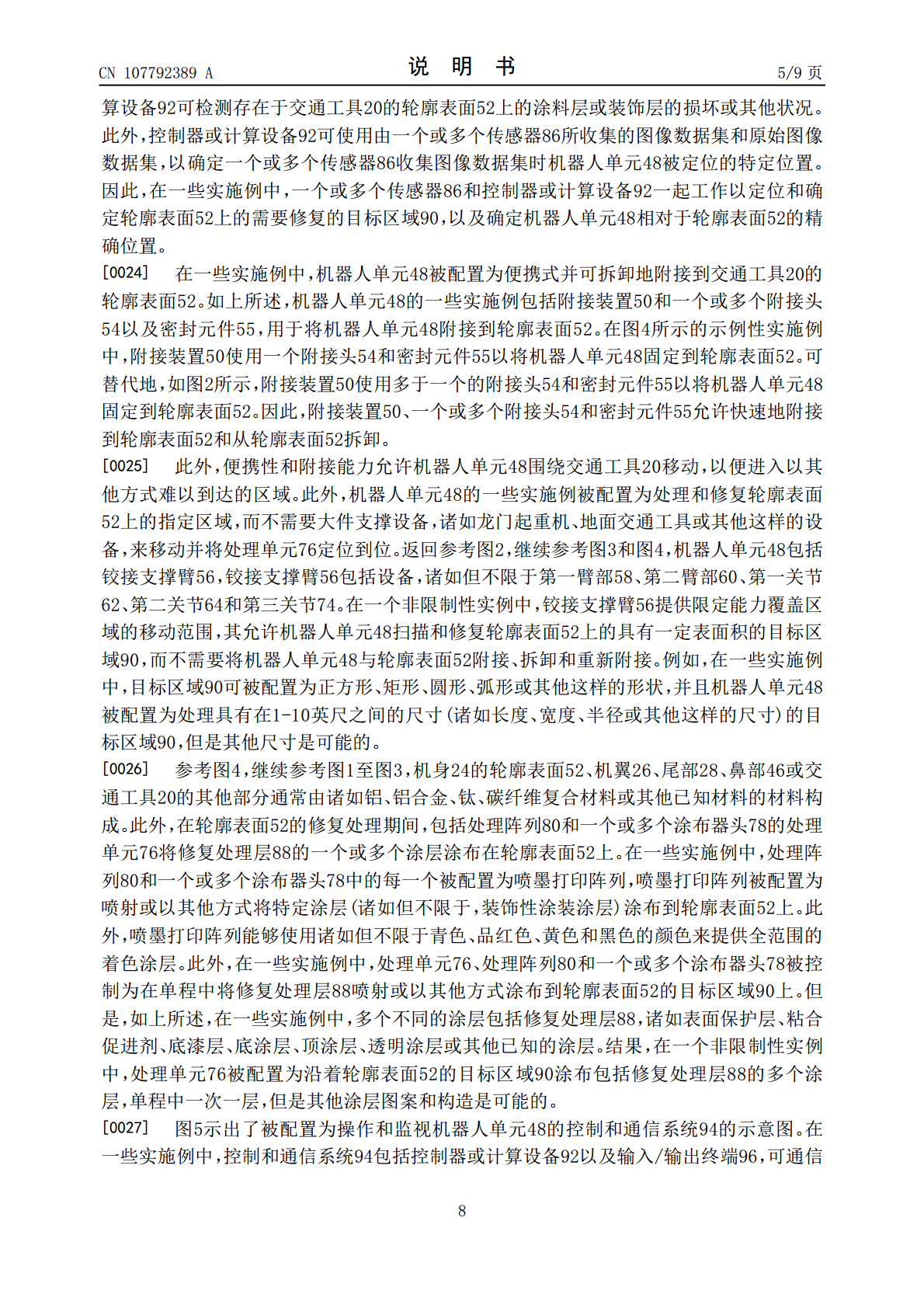
用于对轮廓表面进行表面处理的表面处理修复设备及方法.pdf

是你****盟主


1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于对轮廓表面进行表面处理的表面处理修复设备及方法.pdf
本申请公开了用于对轮廓表面进行表面处理的表面处理修复设备及方法。用于对轮廓表面施加表面处理的表面处理修复设备包括被配置为可拆卸地附接到轮廓表面的附接装置和耦接到附接装置的机器人单元。此外,处理单元可操作地安装在机器人单元上,并且包括形成处理阵列的多个涂布器头,并且每个涂布器头被配置为施加表面修复处理。至少一个传感器安装在处理单元上并且被配置为识别用于表面修复处理的目标区域,并且控制器可操作地耦接到机器人单元和处理单元。控制器被编程为控制机器人单元的移动以将处理阵列定位成与目标区域邻近,并且选择性地操作处理
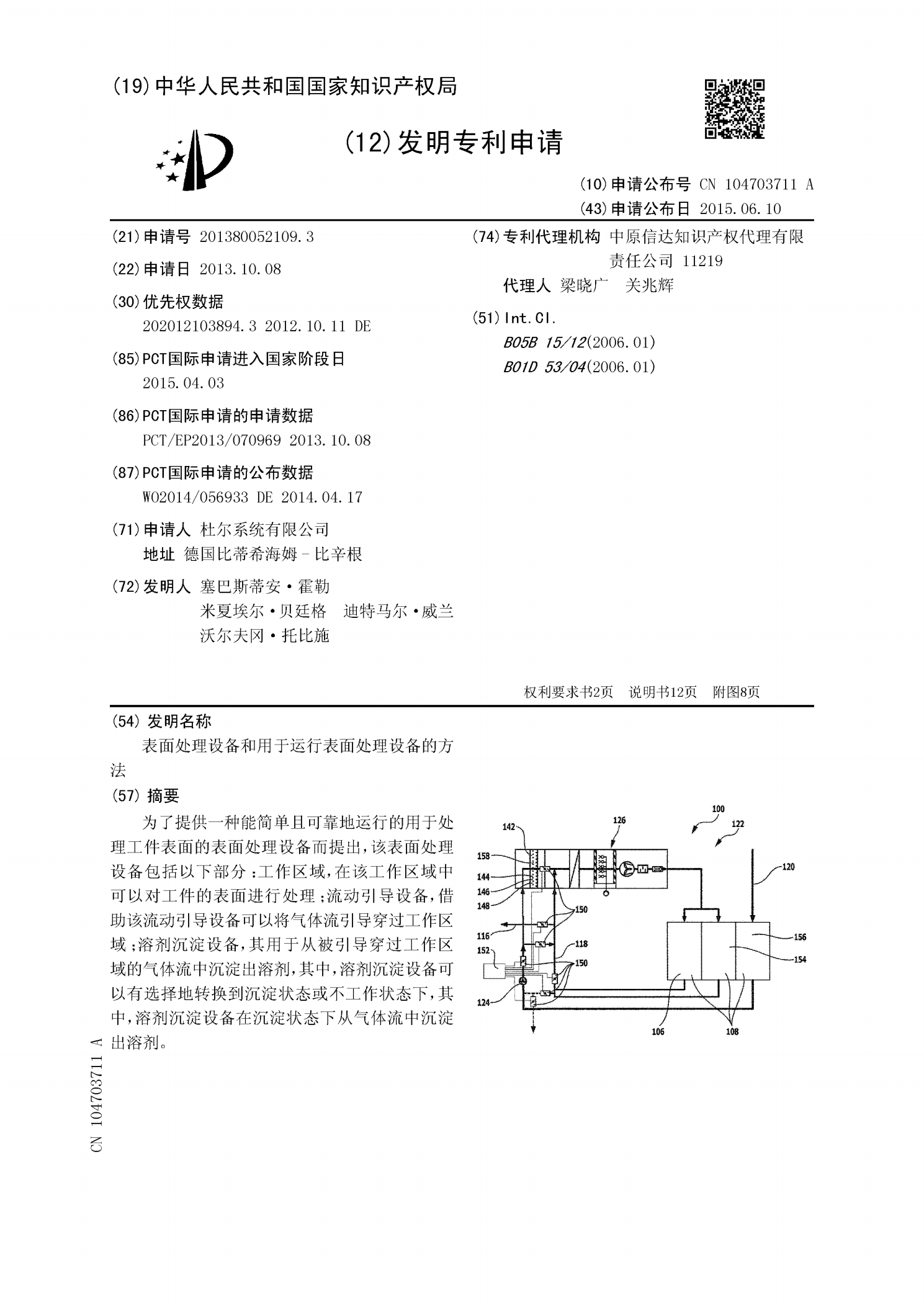
表面处理设备和用于运行表面处理设备的方法.pdf
为了提供一种能简单且可靠地运行的用于处理工件表面的表面处理设备而提出,该表面处理设备包括以下部分:工作区域,在该工作区域中可以对工件的表面进行处理;流动引导设备,借助该流动引导设备可以将气体流引导穿过工作区域;溶剂沉淀设备,其用于从被引导穿过工作区域的气体流中沉淀出溶剂,其中,溶剂沉淀设备可以有选择地转换到沉淀状态或不工作状态下,其中,溶剂沉淀设备在沉淀状态下从气体流中沉淀出溶剂。

用于对眼镜片的表面进行表面处理的方法.pdf
本发明涉及一种对眼镜片的表面进行表面处理的方法,该方法包括基于所述表面的几何特征确定所述镜片的固定转速(Vrot)的一个步骤,其特征在于,该确定该转速(Vrot)的步骤包括以下步骤:基于所述表面(12)的几何特征生成(102)所述表面的几何高度值的档案,所述档案以一个预先确定的参考点处的为零的几何高度值为中心;确定(103)表示所述表面上的几何高度值中的最大差(MaxHk)的一个值;从所述表面上的几何高度值中的所述最大差值(MaxHk)中和从该柱面在一个预先确定的远视控制点处的几何值中推导出(107)该转
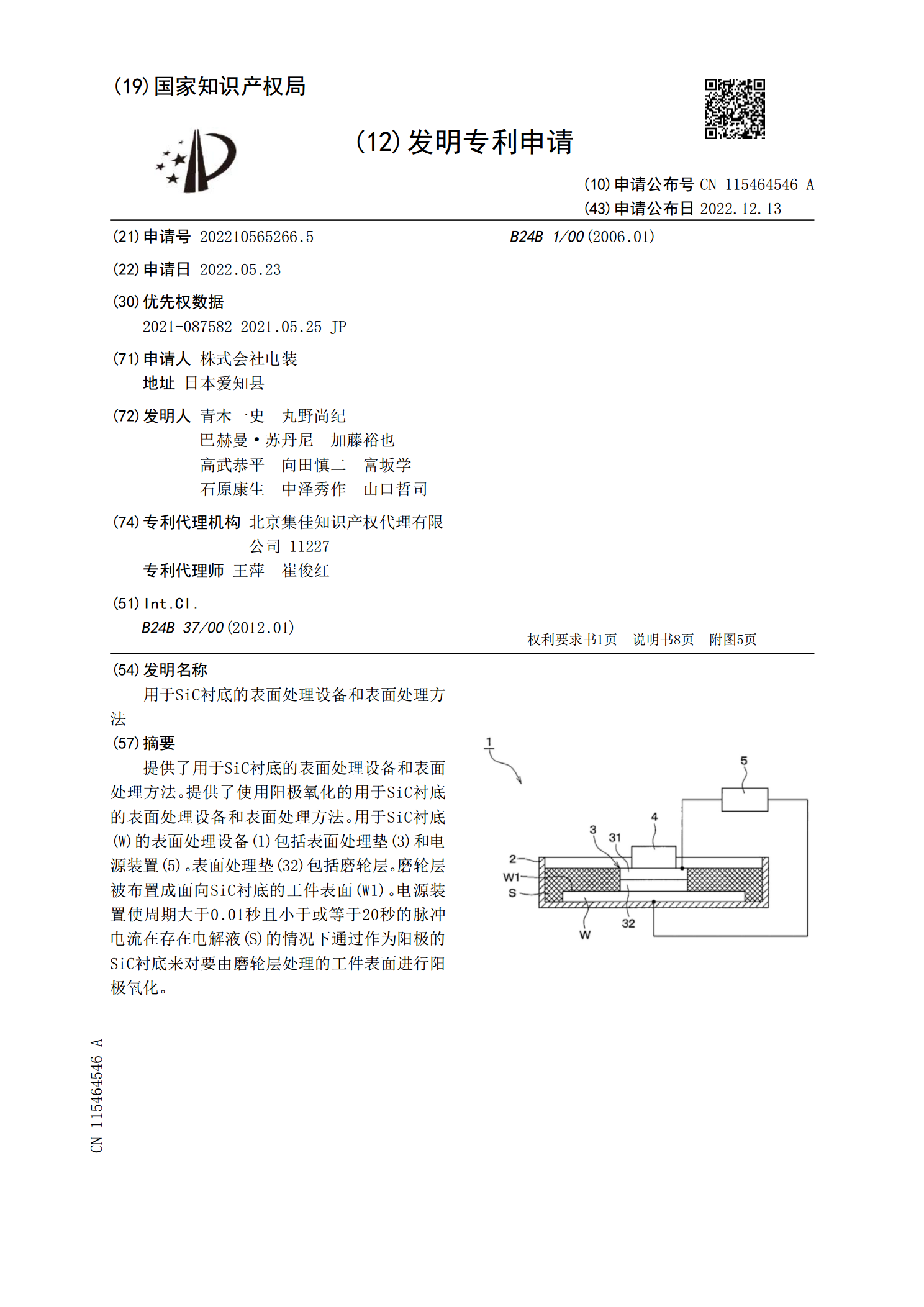
用于SiC衬底的表面处理设备和表面处理方法.pdf
提供了用于SiC衬底的表面处理设备和表面处理方法。提供了使用阳极氧化的用于SiC衬底的表面处理设备和表面处理方法。用于SiC衬底(W)的表面处理设备(1)包括表面处理垫(3)和电源装置(5)。表面处理垫(32)包括磨轮层。磨轮层被布置成面向SiC衬底的工件表面(W1)。电源装置使周期大于0.01秒且小于或等于20秒的脉冲电流在存在电解液(S)的情况下通过作为阳极的SiC衬底来对要由磨轮层处理的工件表面进行阳极氧化。
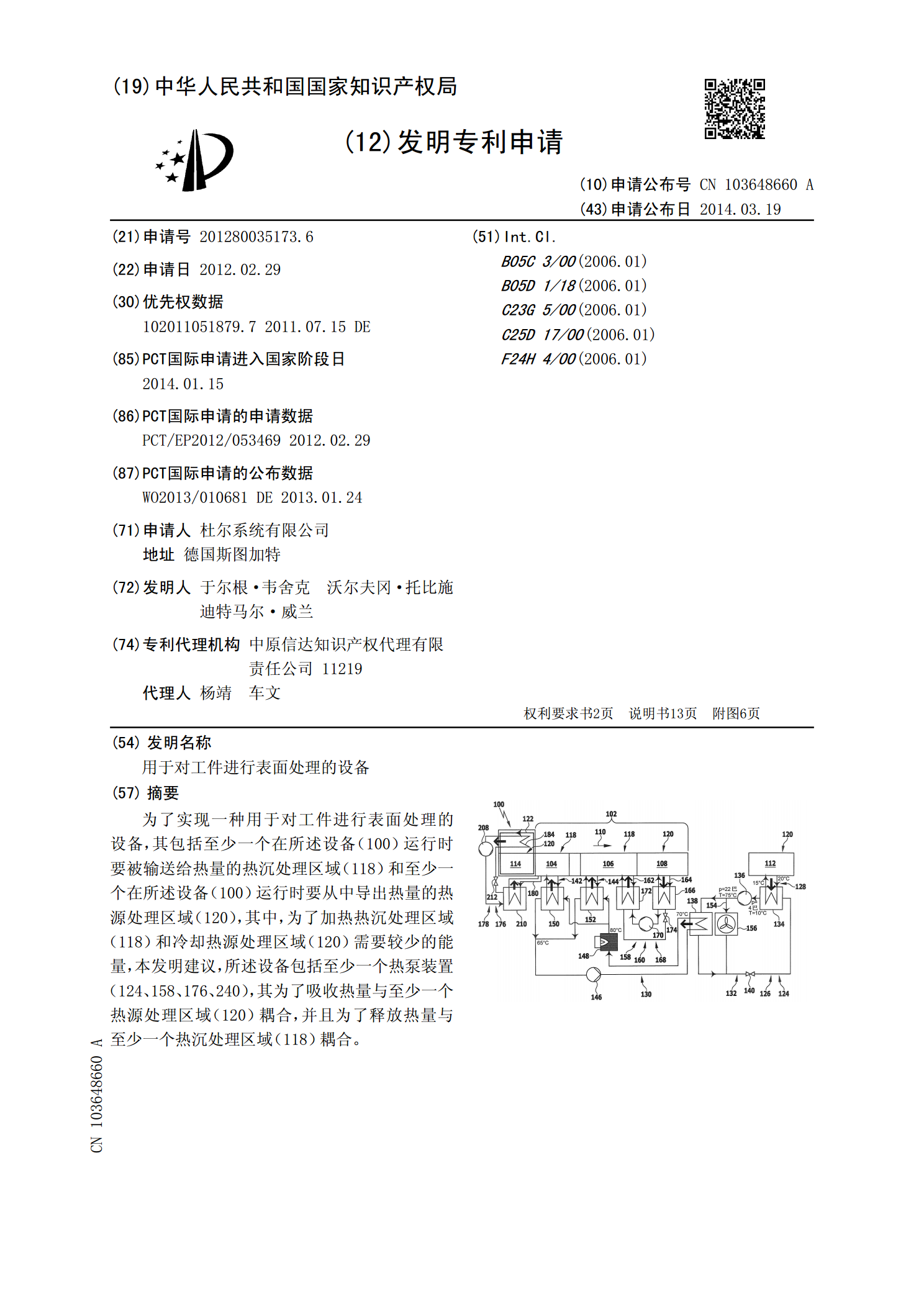
用于对工件进行表面处理的设备.pdf
为了实现一种用于对工件进行表面处理的设备,其包括至少一个在所述设备(100)运行时要被输送给热量的热沉处理区域(118)和至少一个在所述设备(100)运行时要从中导出热量的热源处理区域(120),其中,为了加热热沉处理区域(118)和冷却热源处理区域(120)需要较少的能量,本发明建议,所述设备包括至少一个热泵装置(124、158、176、240),其为了吸收热量与至少一个热源处理区域(120)耦合,并且为了释放热量与至少一个热沉处理区域(118)耦合。