
一种双驱动履带差速行走机构.pdf

山梅****ai

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种双驱动履带差速行走机构.pdf
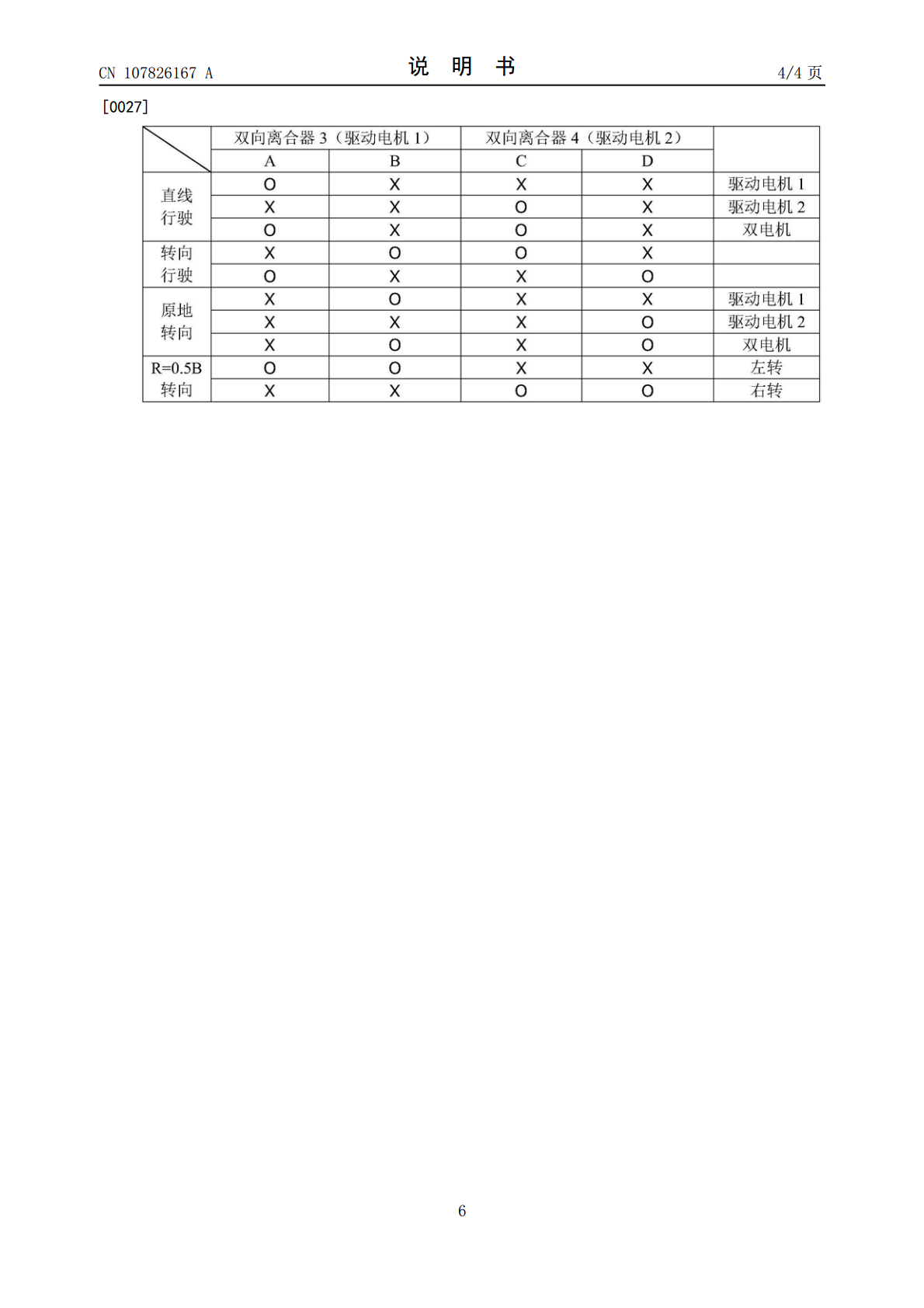
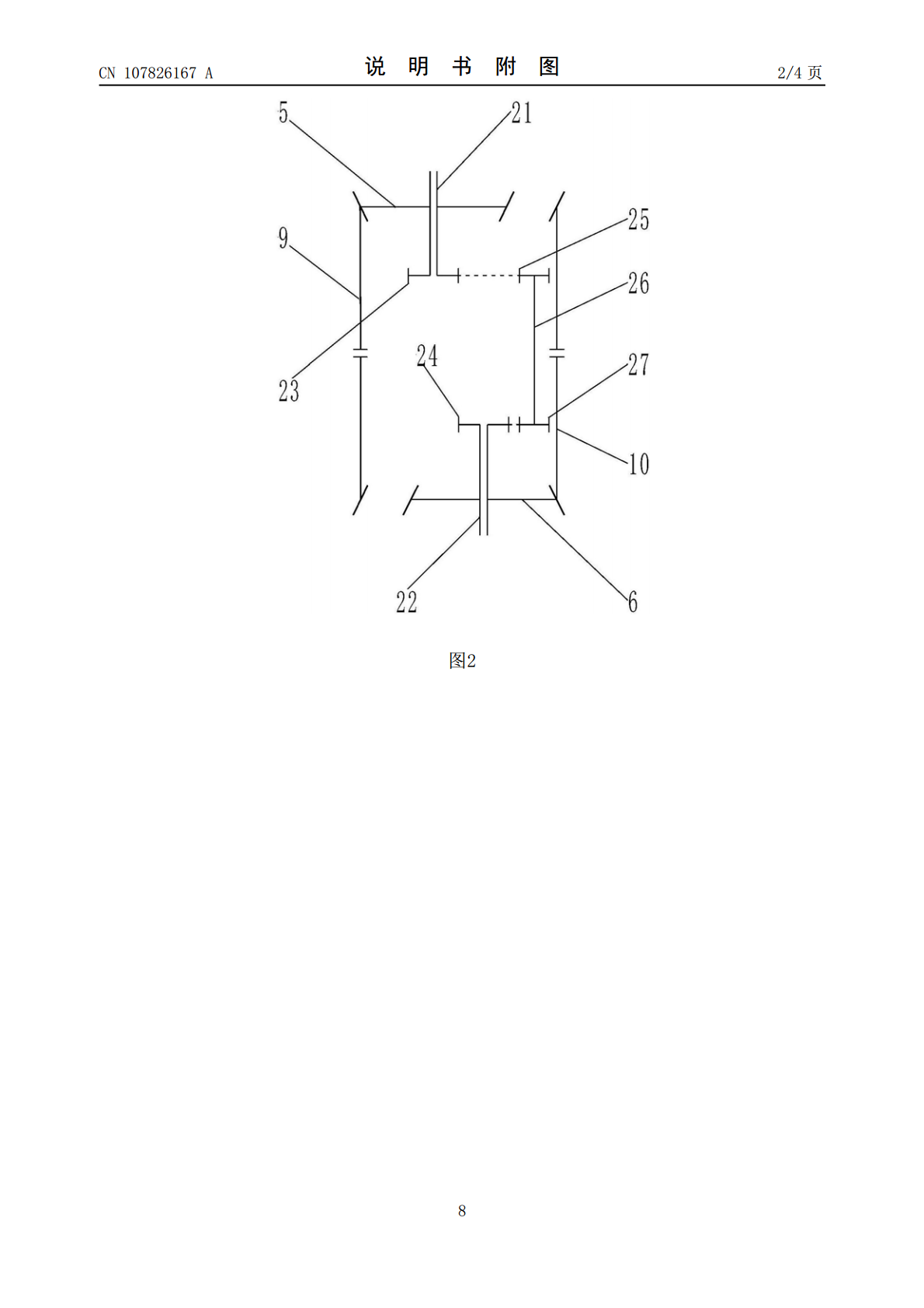
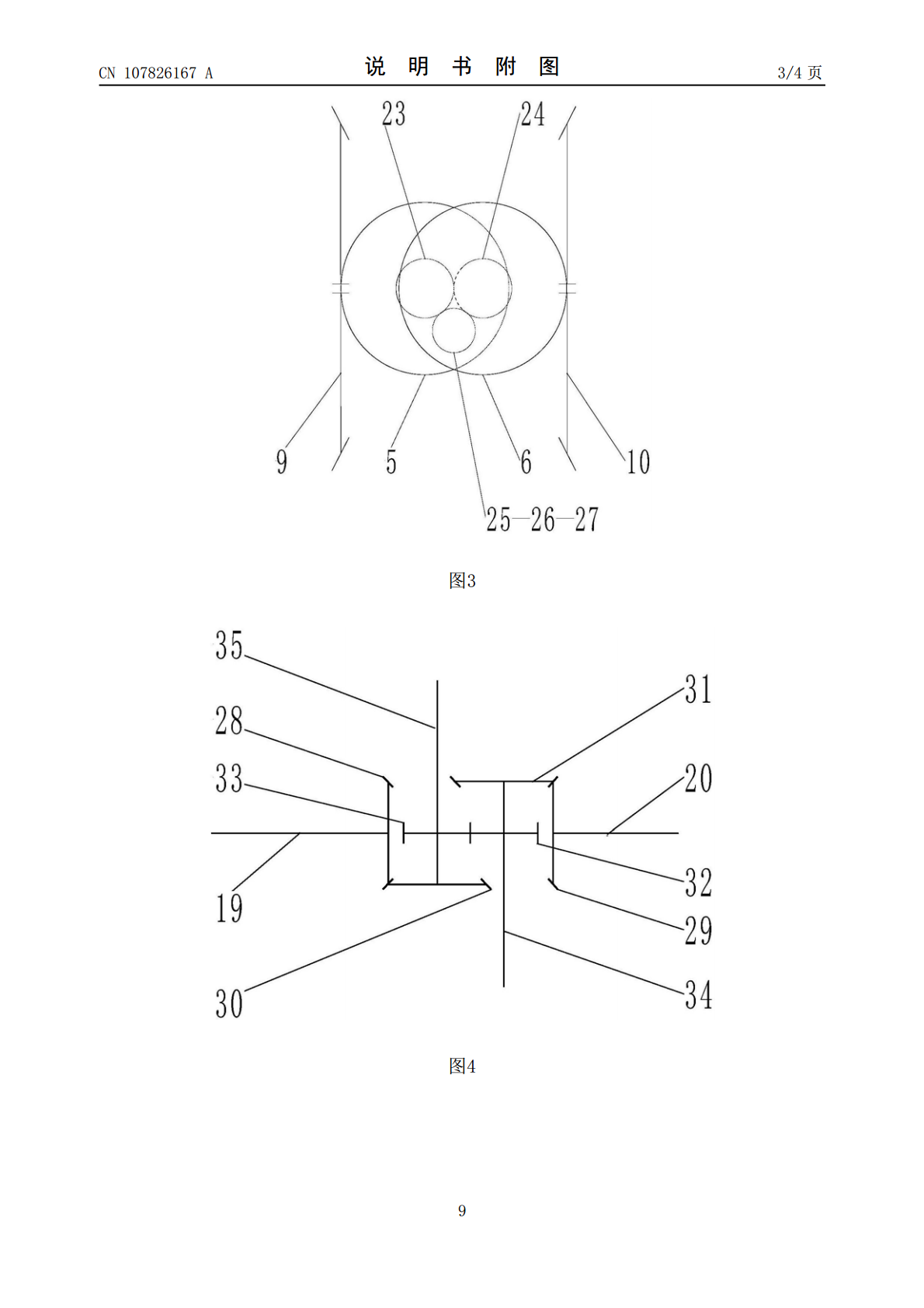
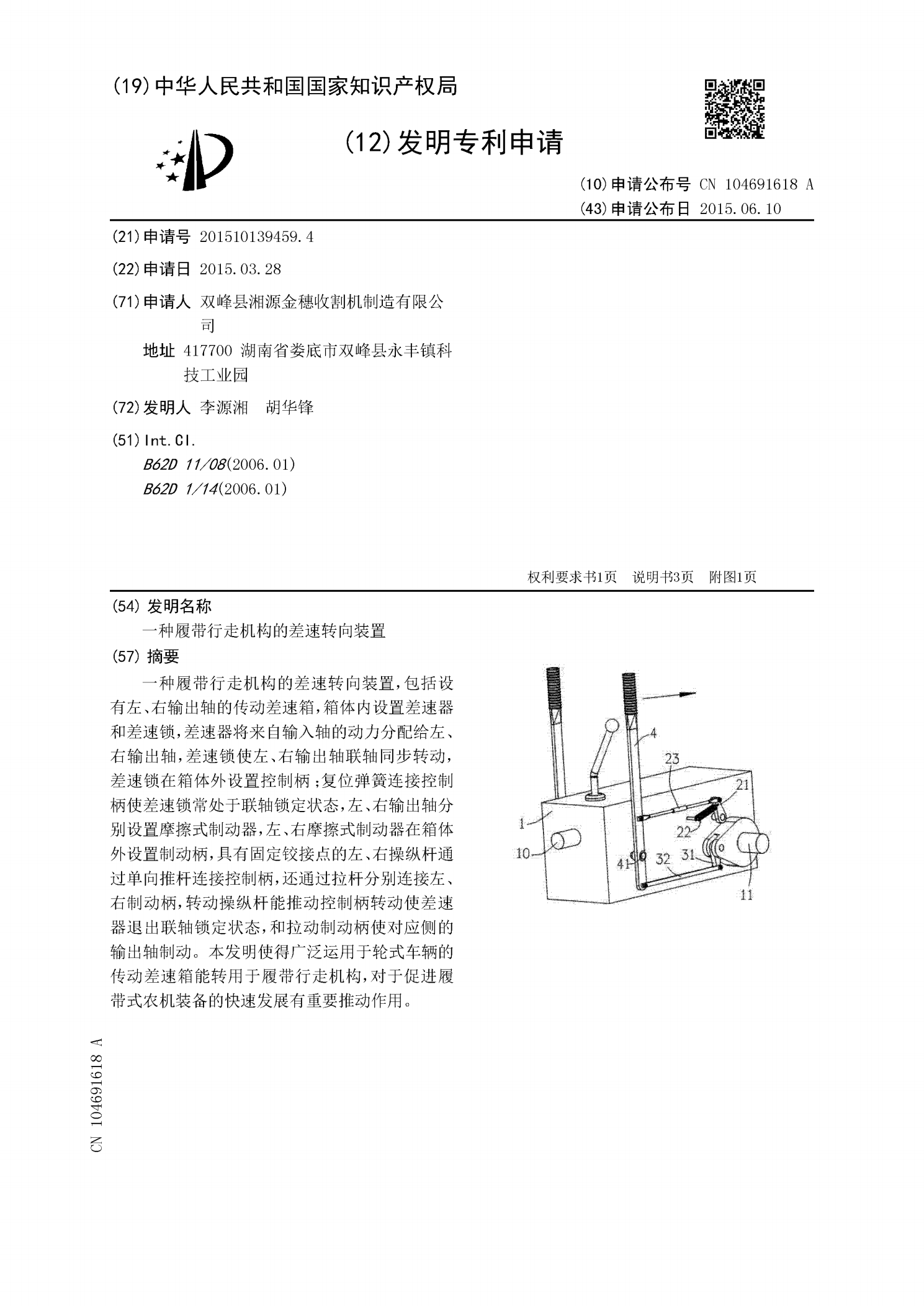
本发明涉及一种双驱动履带差速行走机构,属于工程机械技术领域。本发明由两个电动机、两组双向离合器、差速机构、主传动机构、两组动力耦合机构组成,两个电动机分别通过两组双向离合器与主传动机构的主锥齿轮以及差速机构相连,每个电动机通过对双向离合器的控制均可以独立实现履带车辆的直线行驶、原地转向及转向行驶,两个电动机可以相互替代,并且能够同时或分别进行直线行驶及转向的动力输入,每个电动机均采用变频驱动技术来实现对履带车辆转弯半径的控制,本发明结构紧凑、布置合理、控制简单、可靠性高。
一种履带行走机构的差速转向装置.pdf
一种履带行走机构的差速转向装置,包括设有左、右输出轴的传动差速箱,箱体内设置差速器和差速锁,差速器将来自输入轴的动力分配给左、右输出轴,差速锁使左、右输出轴联轴同步转动,差速锁在箱体外设置控制柄;复位弹簧连接控制柄使差速锁常处于联轴锁定状态,左、右输出轴分别设置摩擦式制动器,左、右摩擦式制动器在箱体外设置制动柄,具有固定铰接点的左、右操纵杆通过单向推杆连接控制柄,还通过拉杆分别连接左、右制动柄,转动操纵杆能推动控制柄转动使差速器退出联轴锁定状态,和拉动制动柄使对应侧的输出轴制动。本发明使得广泛运用于轮式车
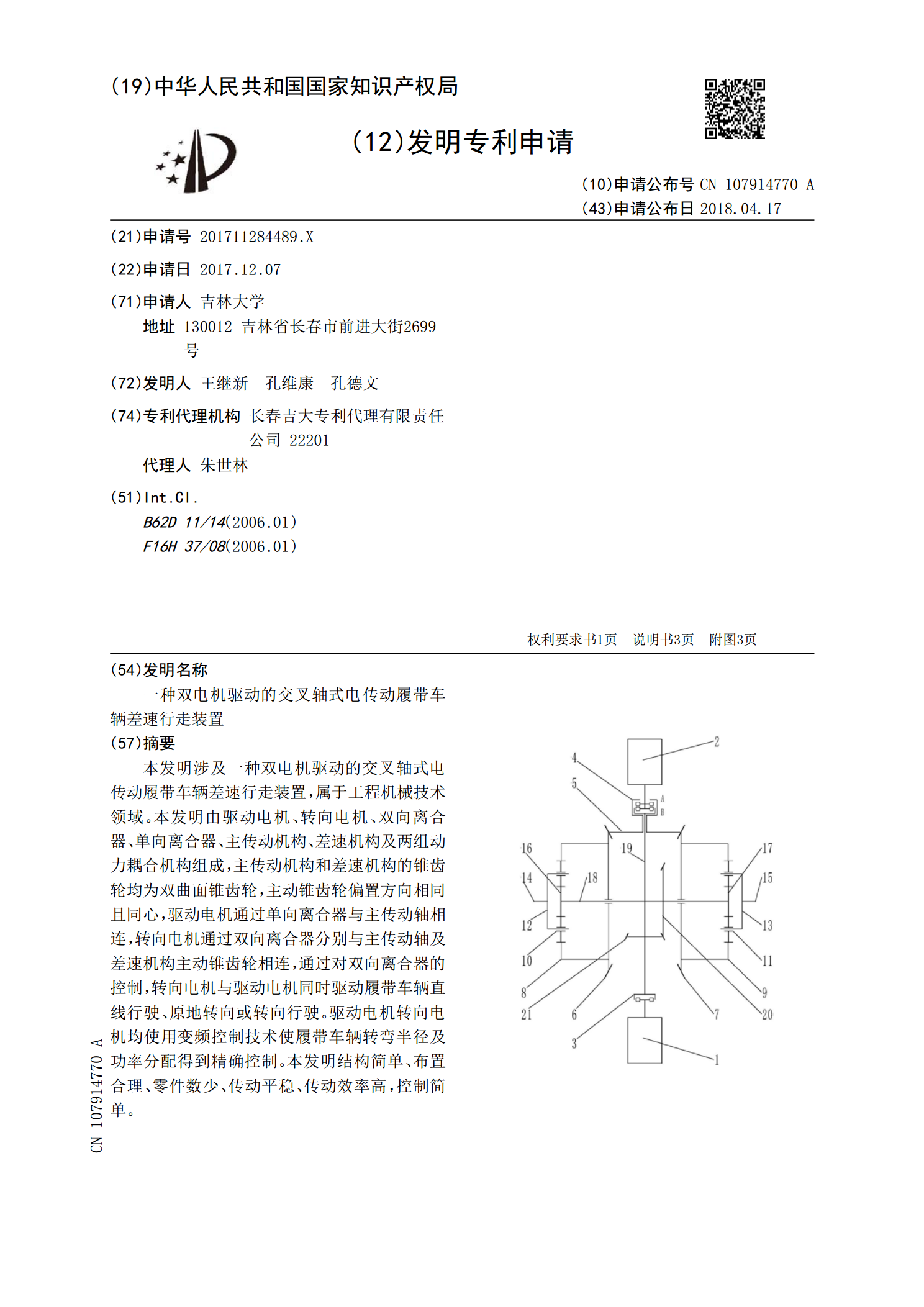
一种双电机驱动的交叉轴式电传动履带车辆差速行走装置.pdf
本发明涉及一种双电机驱动的交叉轴式电传动履带车辆差速行走装置,属于工程机械技术领域。本发明由驱动电机、转向电机、双向离合器、单向离合器、主传动机构、差速机构及两组动力耦合机构组成,主传动机构和差速机构的锥齿轮均为双曲面锥齿轮,主动锥齿轮偏置方向相同且同心,驱动电机通过单向离合器与主传动轴相连,转向电机通过双向离合器分别与主传动轴及差速机构主动锥齿轮相连,通过对双向离合器的控制,转向电机与驱动电机同时驱动履带车辆直线行驶、原地转向或转向行驶。驱动电机转向电机均使用变频控制技术使履带车辆转弯半径及功率分配得到

一种双输入旋转差速驱动装置.pdf
本发明提供了一种双输入旋转差速驱动装置,该装置具有输入Ⅰ轴和输入Ⅱ轴两个独立的输入端,可分别与两个具有不同转速的电机相连,作为该装置两个独立旋转输入。两输入最终分别利用第一输入组件、第二输入组件驱动后行星齿轮组的内齿圈及前行星齿轮组的前太阳轮转动,在前太阳轮和浮动内齿圈的共同作用下,前行星轮不仅发生自转,而且当前太阳轮和浮动内齿圈之间存在速度差时,会驱动前行星轮带动前轴架进行公转转动,从而实现差速驱动输出。本发明基于双输入-单输出的差速驱动,两个独立输入端工作在速度控制模式下,可实现该装置的旋转输出的灵活
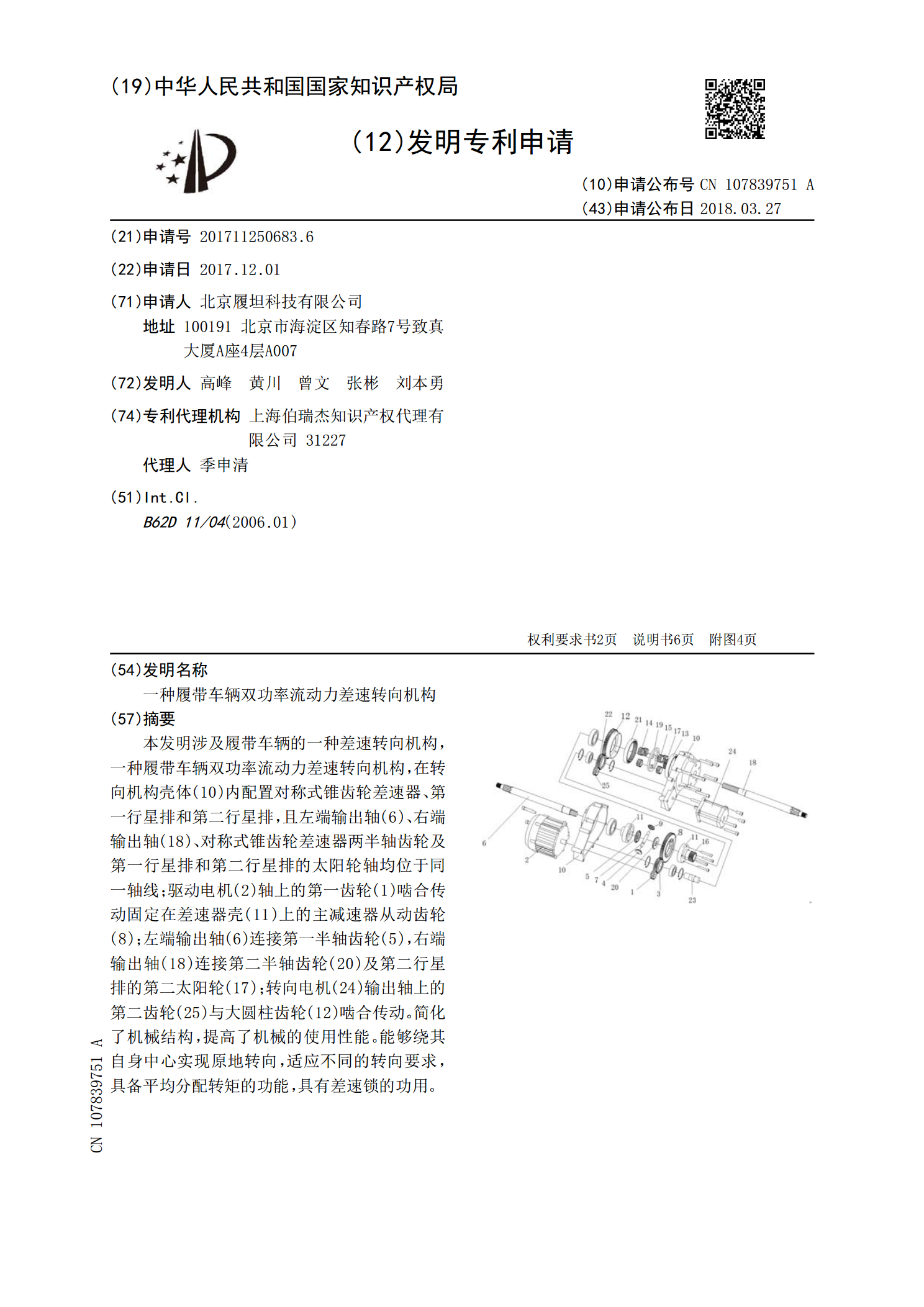
一种履带车辆双功率流动力差速转向机构.pdf
本发明涉及履带车辆的一种差速转向机构,一种履带车辆双功率流动力差速转向机构,在转向机构壳体(10)内配置对称式锥齿轮差速器、第一行星排和第二行星排,且左端输出轴(6)、右端输出轴(18)、对称式锥齿轮差速器两半轴齿轮及第一行星排和第二行星排的太阳轮轴均位于同一轴线;驱动电机(2)轴上的第一齿轮(1)啮合传动固定在差速器壳(11)上的主减速器从动齿轮(8);左端输出轴(6)连接第一半轴齿轮(5),右端输出轴(18)连接第二半轴齿轮(20)及第二行星排的第二太阳轮(17);转向电机(24)输出轴上的第二齿轮(