
一种飞机刹车控制系统.pdf

梦影****主a

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种飞机刹车控制系统.pdf
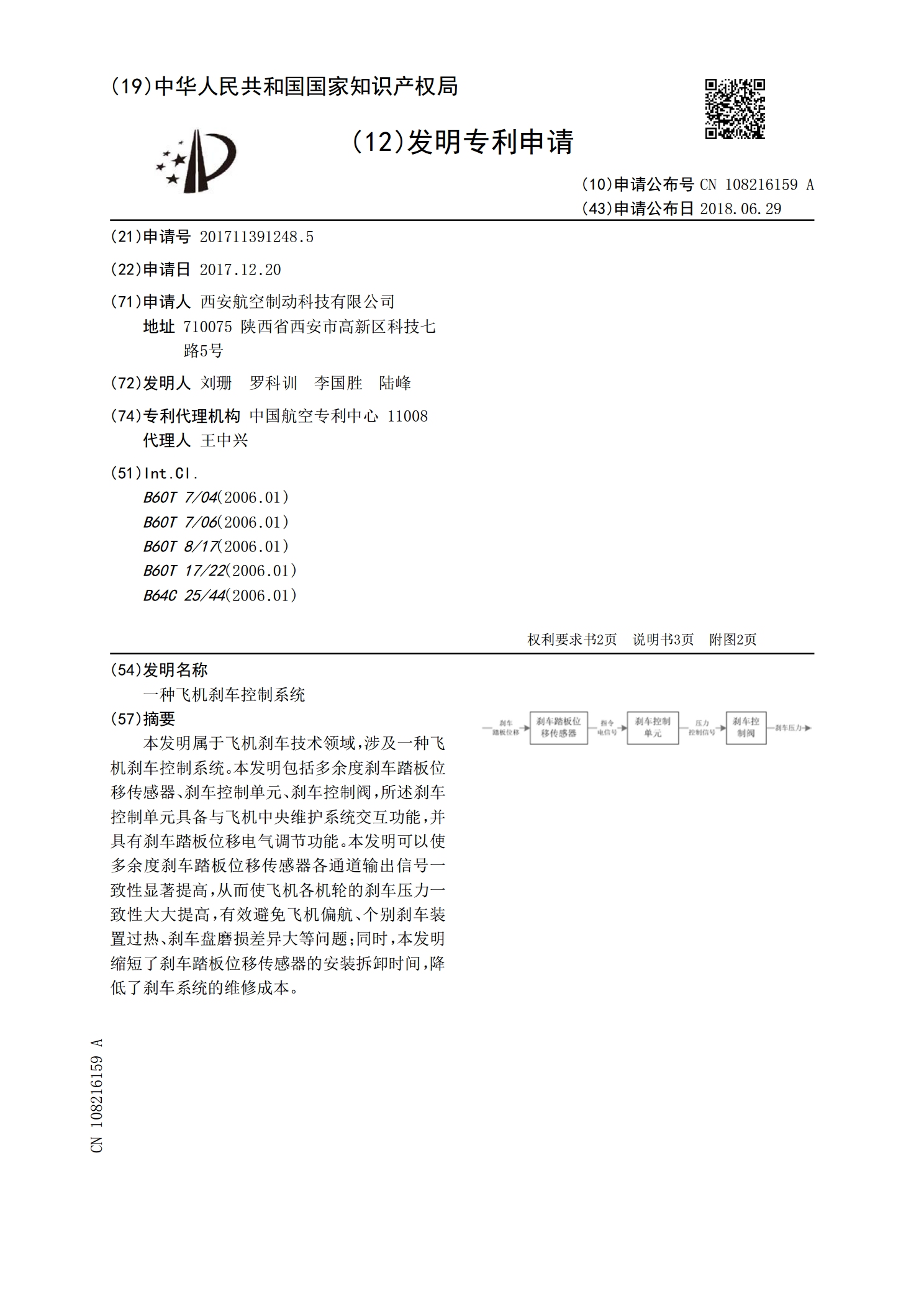
本发明属于飞机刹车技术领域,涉及一种飞机刹车控制系统。本发明包括多余度刹车踏板位移传感器、刹车控制单元、刹车控制阀,所述刹车控制单元具备与飞机中央维护系统交互功能,并具有刹车踏板位移电气调节功能。本发明可以使多余度刹车踏板位移传感器各通道输出信号一致性显著提高,从而使飞机各机轮的刹车压力一致性大大提高,有效避免飞机偏航、个别刹车装置过热、刹车盘磨损差异大等问题;同时,本发明缩短了刹车踏板位移传感器的安装拆卸时间,降低了刹车系统的维修成本。
一种飞机刹车的控制系统.pdf
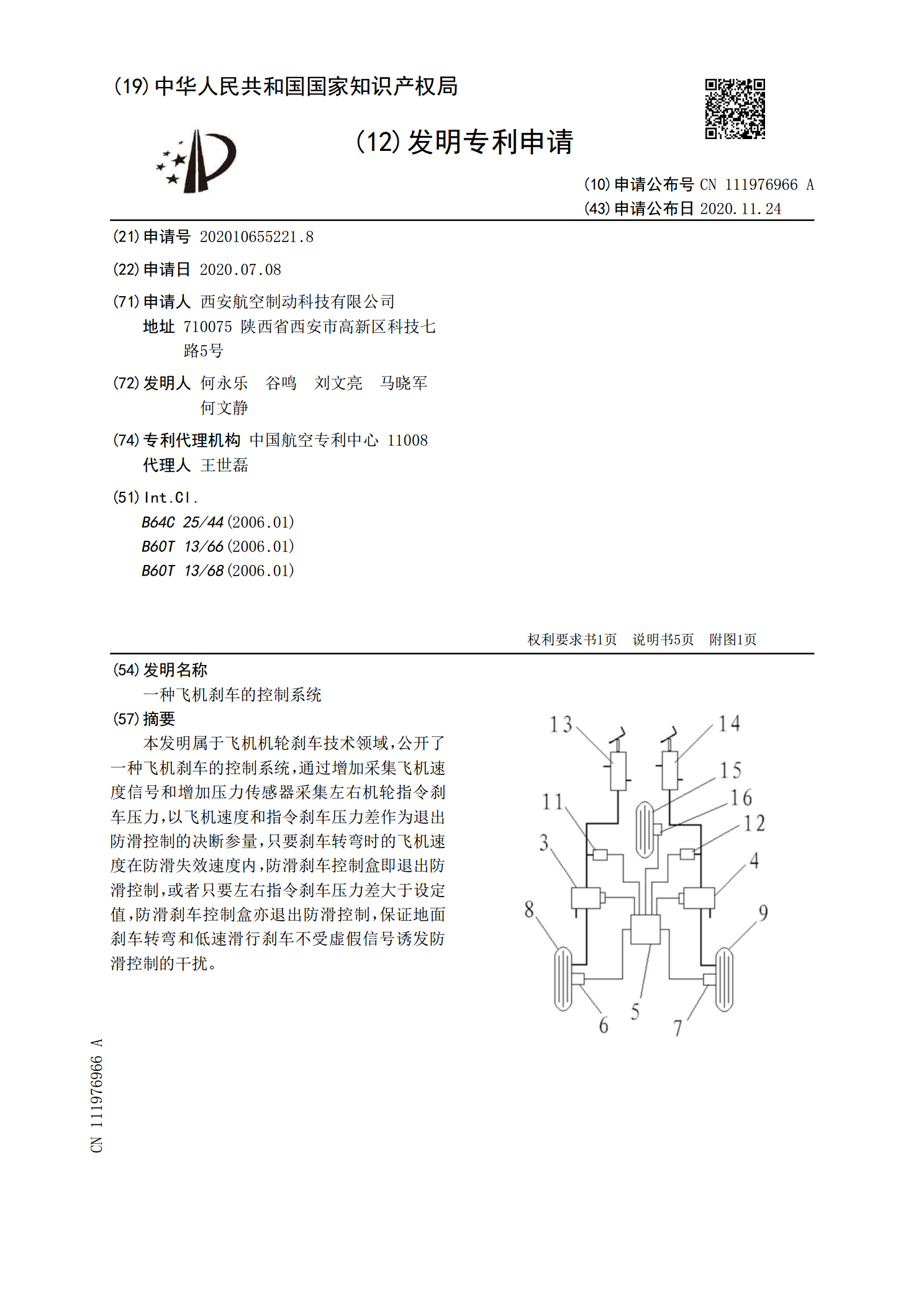
本发明属于飞机机轮刹车技术领域,公开了一种飞机刹车的控制系统,通过增加采集飞机速度信号和增加压力传感器采集左右机轮指令刹车压力,以飞机速度和指令刹车压力差作为退出防滑控制的决断参量,只要刹车转弯时的飞机速度在防滑失效速度内,防滑刹车控制盒即退出防滑控制,或者只要左右指令刹车压力差大于设定值,防滑刹车控制盒亦退出防滑控制,保证地面刹车转弯和低速滑行刹车不受虚假信号诱发防滑控制的干扰。

一种飞机刹车控制系统.pdf
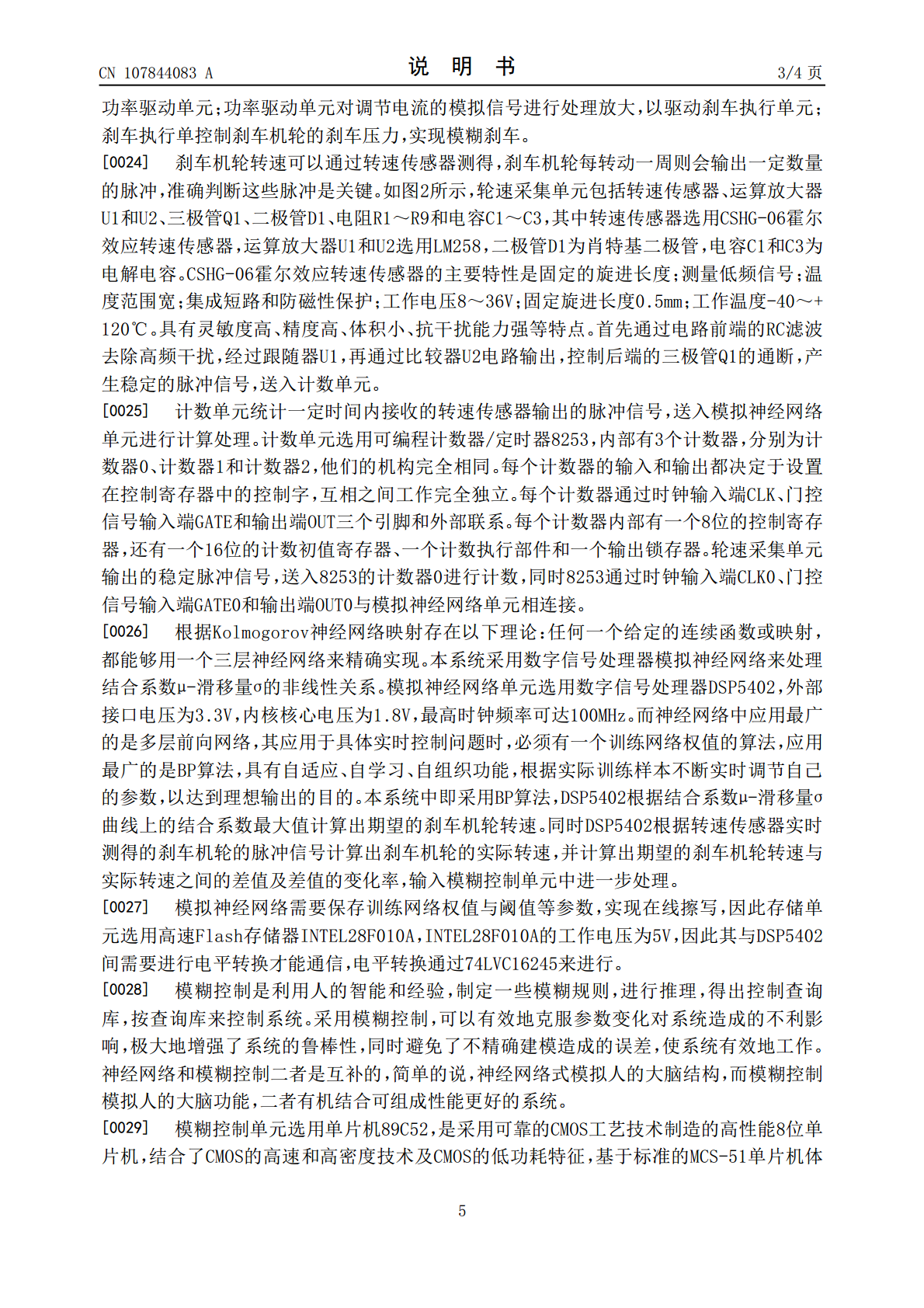
本发明提供了一种飞机刹车控制系统,包括轮速采集单元、计数单元、模拟神经网络单元、存储单元、模糊控制单元、数模转换单元、功率驱动单元和刹车执行单元。本发明通过用DSP模拟神经网络和单片机实现模糊控制相结合,组成DSP和单片机的双机系统,利用模拟神经网络计算出的期望机轮转速和转速传感器实际测得的机轮转速之间的差值对飞机的刹车执行机构进行自适应调节,实现模糊刹车,提高了原有飞机防滑刹车的性能,减少了制动距离和制动时间,受路面影响小,具有很好的控制鲁棒性,为神经网络和模糊控制在嵌入式系统中得到广泛的应用提供了新的
一种飞机刹车控制系统及方法.pdf
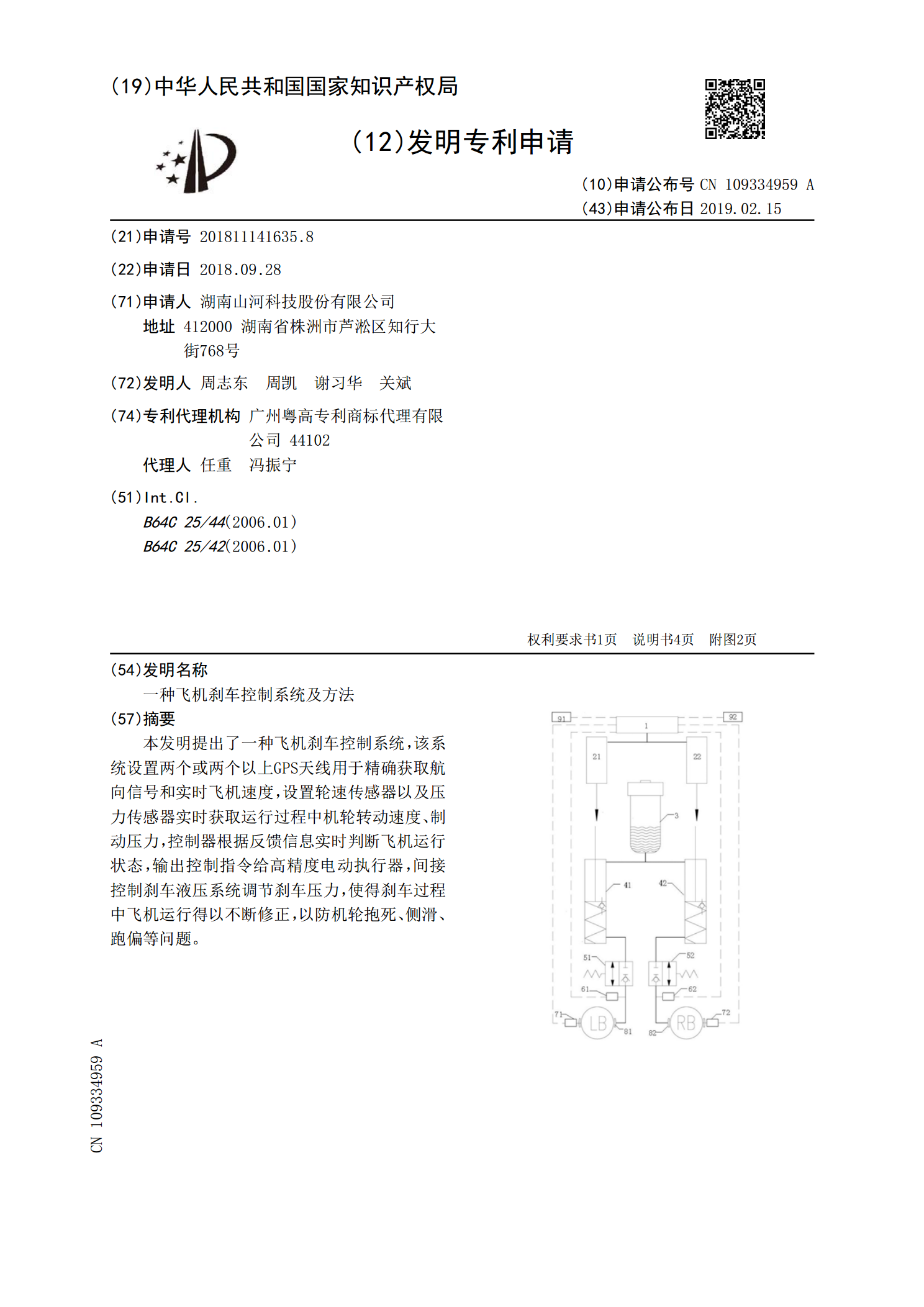
本发明提出了一种飞机刹车控制系统,该系统设置两个或两个以上GPS天线用于精确获取航向信号和实时飞机速度,设置轮速传感器以及压力传感器实时获取运行过程中机轮转动速度、制动压力,控制器根据反馈信息实时判断飞机运行状态,输出控制指令给高精度电动执行器,间接控制刹车液压系统调节刹车压力,使得刹车过程中飞机运行得以不断修正,以防机轮抱死、侧滑、跑偏等问题。
一种飞机防滑刹车控制系统.pdf
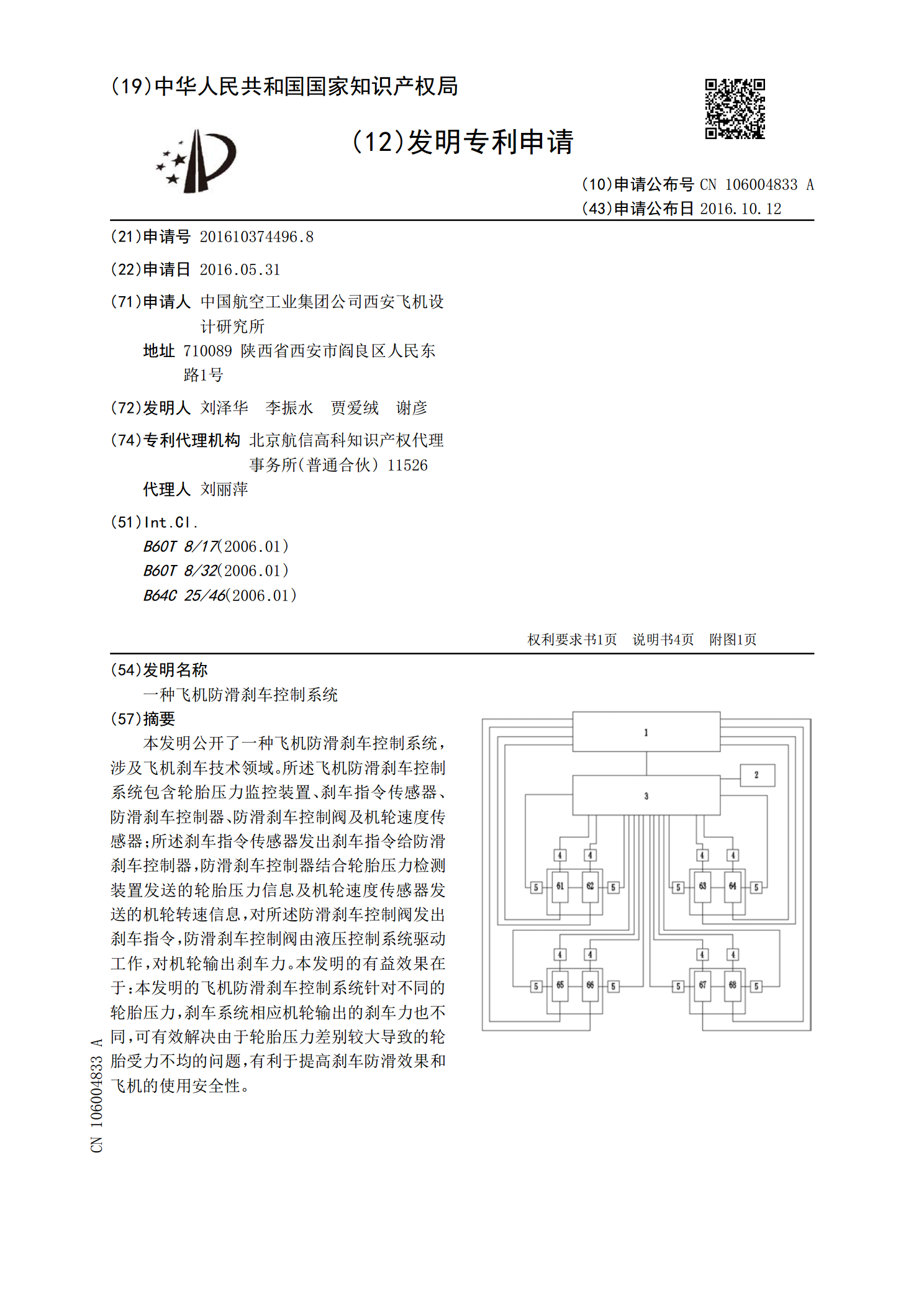
本发明公开了一种飞机防滑刹车控制系统,涉及飞机刹车技术领域。所述飞机防滑刹车控制系统包含轮胎压力监控装置、刹车指令传感器、防滑刹车控制器、防滑刹车控制阀及机轮速度传感器;所述刹车指令传感器发出刹车指令给防滑刹车控制器,防滑刹车控制器结合轮胎压力检测装置发送的轮胎压力信息及机轮速度传感器发送的机轮转速信息,对所述防滑刹车控制阀发出刹车指令,防滑刹车控制阀由液压控制系统驱动工作,对机轮输出刹车力。本发明的有益效果在于:本发明的飞机防滑刹车控制系统针对不同的轮胎压力,刹车系统相应机轮输出的刹车力也不同,可有效解