
一种面向人机和谐的汽车躲避动障碍物控制方法.pdf

慧娇****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种面向人机和谐的汽车躲避动障碍物控制方法.pdf
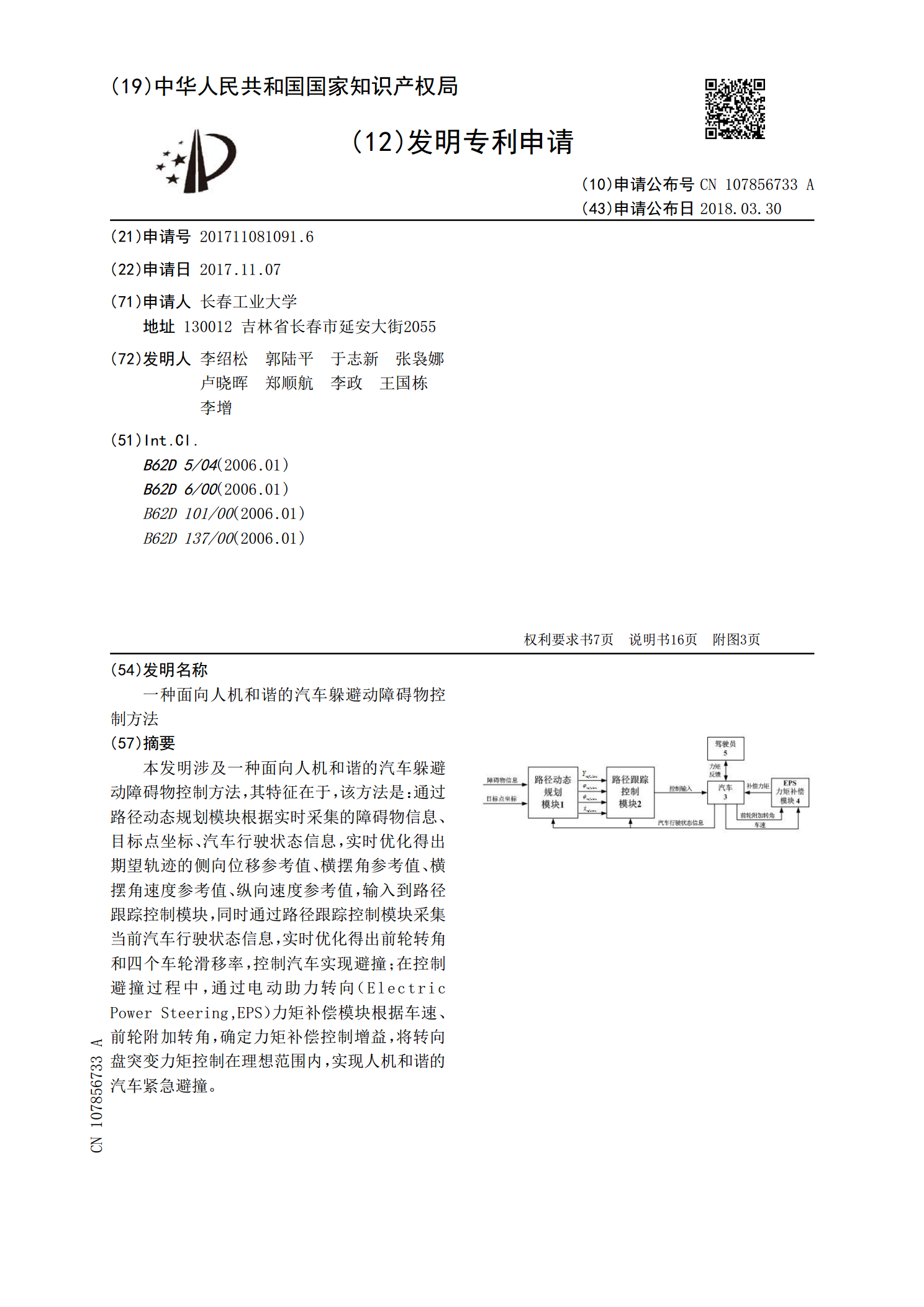
本发明涉及一种面向人机和谐的汽车躲避动障碍物控制方法,其特征在于,该方法是:通过路径动态规划模块根据实时采集的障碍物信息、目标点坐标、汽车行驶状态信息,实时优化得出期望轨迹的侧向位移参考值、横摆角参考值、横摆角速度参考值、纵向速度参考值,输入到路径跟踪控制模块,同时通过路径跟踪控制模块采集当前汽车行驶状态信息,实时优化得出前轮转角和四个车轮滑移率,控制汽车实现避撞;在控制避撞过程中,通过电动助力转向(ElectricPowerSteering,EPS)力矩补偿模块根据车速、前轮附加转角,确定力矩补偿控

一种躲避动障碍物的汽车紧急避撞一体式控制方法.pdf
本发明涉及一种躲避动障碍物的汽车紧急避撞一体式控制方法,其特征在于,该方法是利用路径动态规划与实时跟踪控制模块,根据实时采集的障碍物信息、目标点坐标、汽车行驶状态信息,实时优化得出汽车的前轮转角和四个车轮滑移率,进而控制汽车实现避撞;其中,障碍物信息包括由雷达传感器测量获得的障碍物外形轮廓的离散点坐标,汽车行驶状态信息包括由车速传感器测量获得的汽车纵向速度和侧向速度以及由陀螺仪测量获得的横摆角速度;在控制避撞过程中,通过电动助力转向(ElectricPowerSteering,EPS)力矩补偿模块根据

一种障碍物躲避装置及其使用方法.pdf
一种障碍物躲避装置及其使用方法,用于指示车体的宽度、车轮的指向及位置的激光指示设备Ⅰ;所述激光指示设备Ⅰ,包括:电源,用于给设备Ⅰ供电;激光二极管驱动电路,用于驱动激光二极管生成激光;激光点生成单元,用于生成激光;激光点阵面板,包括多个激光点生成单元;转向控制器,控制激光点阵面板和车轮同时向左转或向右转,并且转向角度相同;本申请通过控制车辆转向角度,避免了车体或者轮胎刮碰到或者轧到障碍物造成损伤。
一种考虑人机和谐的汽车紧急避撞分层式控制方法.pdf
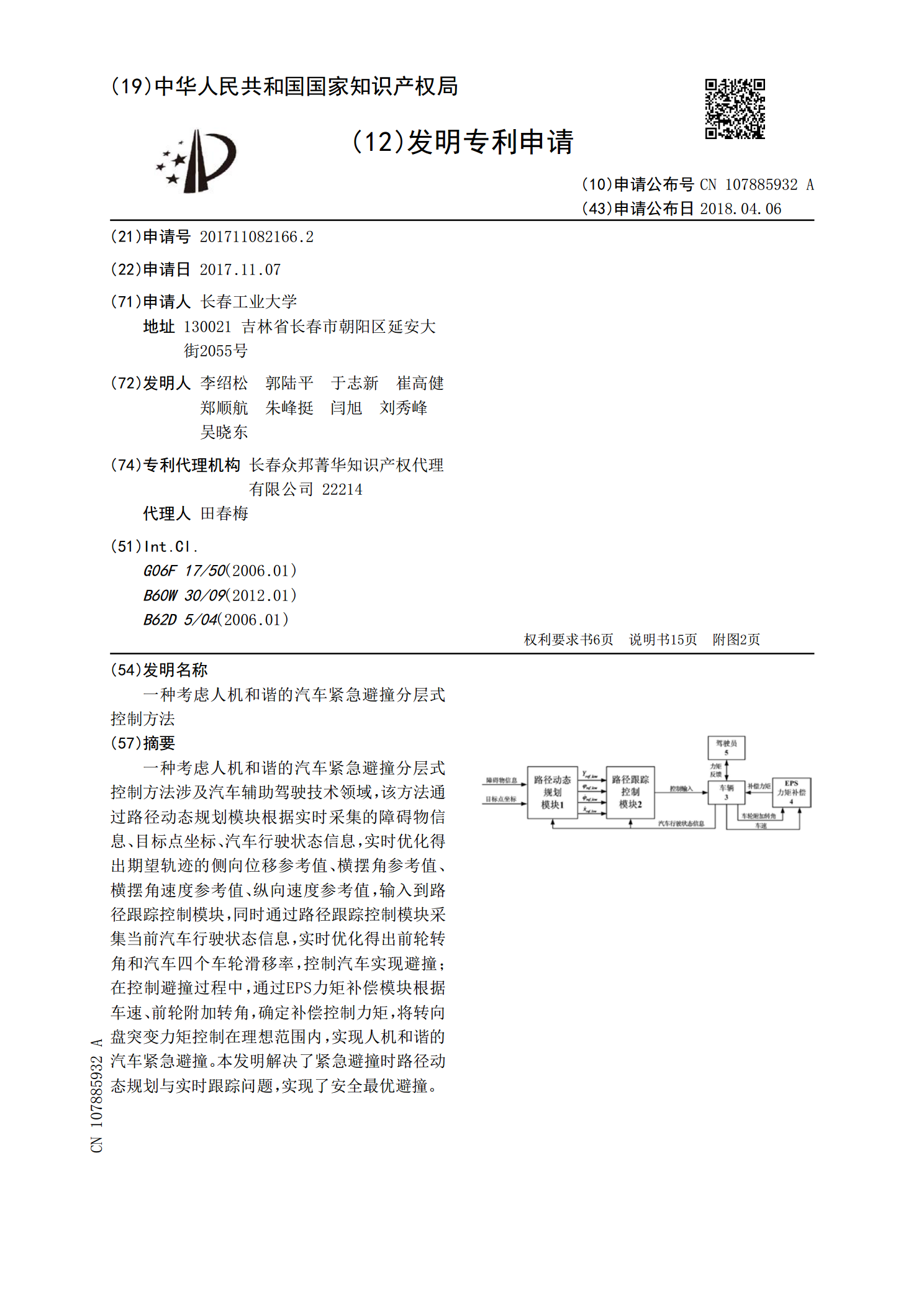
一种考虑人机和谐的汽车紧急避撞分层式控制方法涉及汽车辅助驾驶技术领域,该方法通过路径动态规划模块根据实时采集的障碍物信息、目标点坐标、汽车行驶状态信息,实时优化得出期望轨迹的侧向位移参考值、横摆角参考值、横摆角速度参考值、纵向速度参考值,输入到路径跟踪控制模块,同时通过路径跟踪控制模块采集当前汽车行驶状态信息,实时优化得出前轮转角和汽车四个车轮滑移率,控制汽车实现避撞;在控制避撞过程中,通过EPS力矩补偿模块根据车速、前轮附加转角,确定补偿控制力矩,将转向盘突变力矩控制在理想范围内,实现人机和谐的汽车紧急
一种用于躲避水面与障碍物的通路检测方法.pdf
本发明公开了一种用于躲避水面与障碍物的通路检测方法,用于引导盲人走到没有障碍物与水面的通路区域。该方法通过红色散斑投射器、两个红外相机、姿态角传感器等硬件实现。本发明大幅地提高了盲人避开障碍物与水面并选择通行方向的安全性与便捷性,利于盲人在出行中避开水面和障碍区域,找到正确的通路,具有环境适应性好可在运动情况下使用,学习成本低的优点。