
一种用于躲避水面与障碍物的通路检测方法.pdf

一吃****继勇


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于躲避水面与障碍物的通路检测方法.pdf
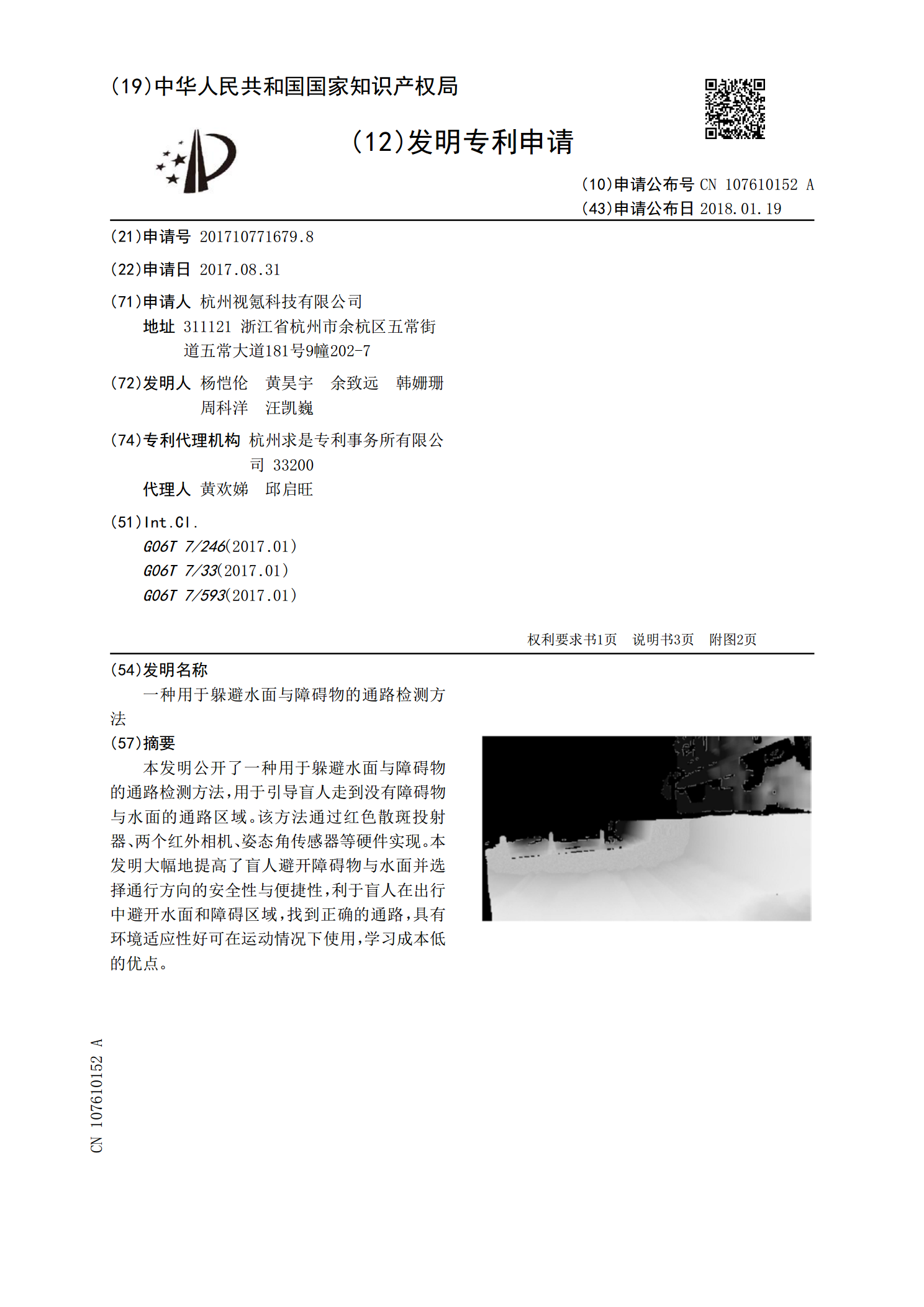
本发明公开了一种用于躲避水面与障碍物的通路检测方法,用于引导盲人走到没有障碍物与水面的通路区域。该方法通过红色散斑投射器、两个红外相机、姿态角传感器等硬件实现。本发明大幅地提高了盲人避开障碍物与水面并选择通行方向的安全性与便捷性,利于盲人在出行中避开水面和障碍区域,找到正确的通路,具有环境适应性好可在运动情况下使用,学习成本低的优点。
一种用于躲避水面与障碍物的盲人辅助眼镜.pdf
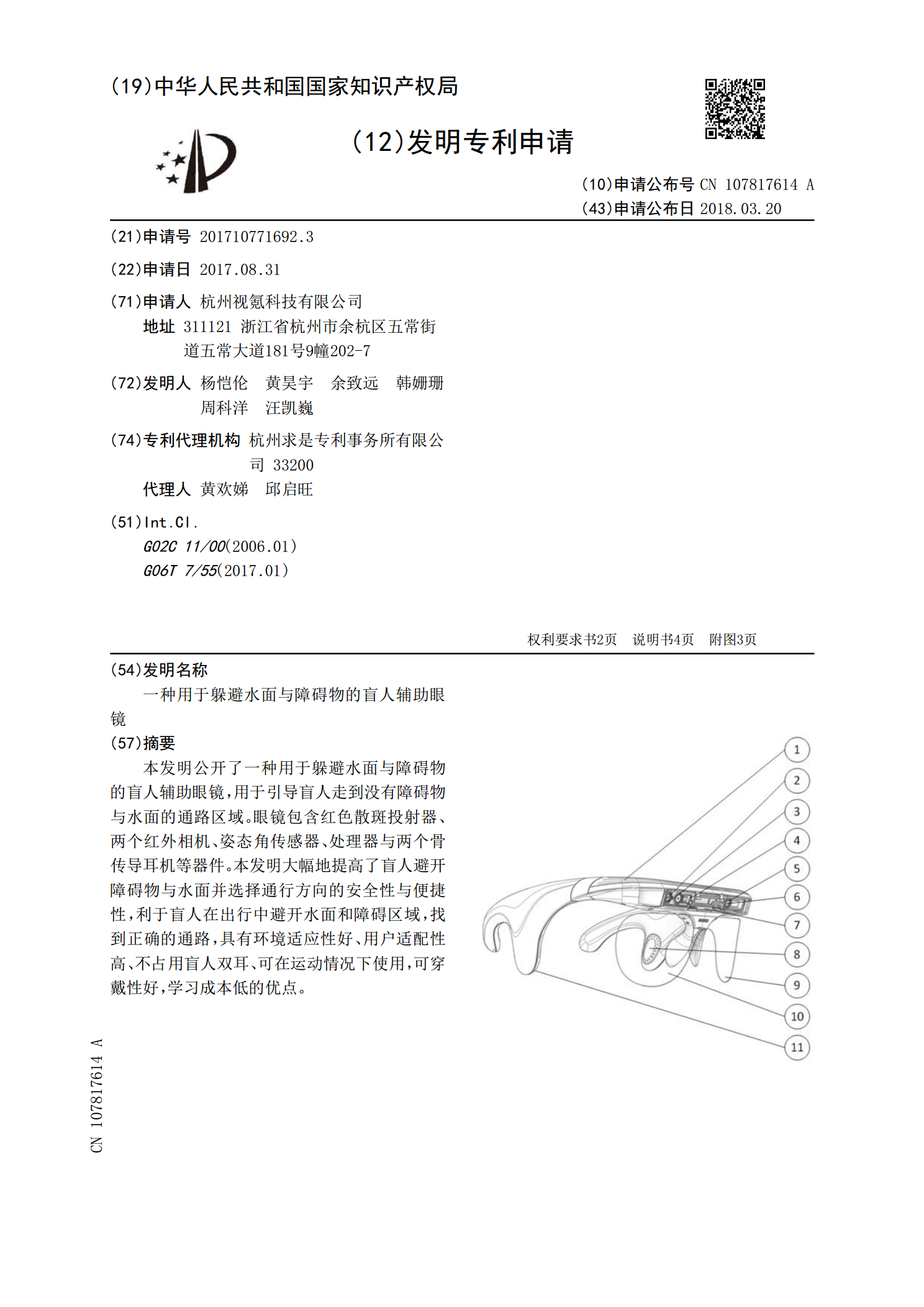
本发明公开了一种用于躲避水面与障碍物的盲人辅助眼镜,用于引导盲人走到没有障碍物与水面的通路区域。眼镜包含红色散斑投射器、两个红外相机、姿态角传感器、处理器与两个骨传导耳机等器件。本发明大幅地提高了盲人避开障碍物与水面并选择通行方向的安全性与便捷性,利于盲人在出行中避开水面和障碍区域,找到正确的通路,具有环境适应性好、用户适配性高、不占用盲人双耳、可在运动情况下使用,可穿戴性好,学习成本低的优点。

一种障碍物躲避装置及其使用方法.pdf
一种障碍物躲避装置及其使用方法,用于指示车体的宽度、车轮的指向及位置的激光指示设备Ⅰ;所述激光指示设备Ⅰ,包括:电源,用于给设备Ⅰ供电;激光二极管驱动电路,用于驱动激光二极管生成激光;激光点生成单元,用于生成激光;激光点阵面板,包括多个激光点生成单元;转向控制器,控制激光点阵面板和车轮同时向左转或向右转,并且转向角度相同;本申请通过控制车辆转向角度,避免了车体或者轮胎刮碰到或者轧到障碍物造成损伤。

一种用于无人驾驶的障碍物检测方法及障碍物检测装置.pdf
本说明书公开了一种用于无人驾驶的障碍物检测方法及障碍物检测装置,涉及无人驾驶领域,获获取无人驾驶设备采集到的点云数据,并确定障碍物在该点云数据中对应的待定检测范围,以及确定该待定检测范围内的点云数据,作为目标点云数据,基于规范点云数据,对该目标点云数据进行数据增强,得到增强后点云数据。而后,确定增强后点云数据对应的点云特征,并根据该点云特征针对该障碍物进行范围检测,得到优化后检测范围,以及基于该优化后检测范围,针对该障碍物进行障碍物检测,从而使得增强后点云数据稠密化,并且部分缺失被填充,使得通过该增强后点

障碍物检测方法、应用于车辆的障碍物检测设备.pdf
本发明提供一种障碍物检测方法、应用于车辆的障碍物检测设备。该方法包括:根据雷达传感器获取的点云数据和图像传感器采集的图像信息,确定目标点云数据;分别对目标点云数据和图像信息进行障碍物识别,得到目标点云数据对应的第一障碍物信息和图像信息对应的第二障碍物信息;将第一障碍物信息与第二障碍物信息进行障碍物融合,确定目标障碍物。本发明能够提高目标障碍物的检测精度。