
超声旋转扫描成像装置和方法.pdf

猫巷****傲柏

1/6
2/6
3/6
4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

超声旋转扫描成像装置和方法.pdf
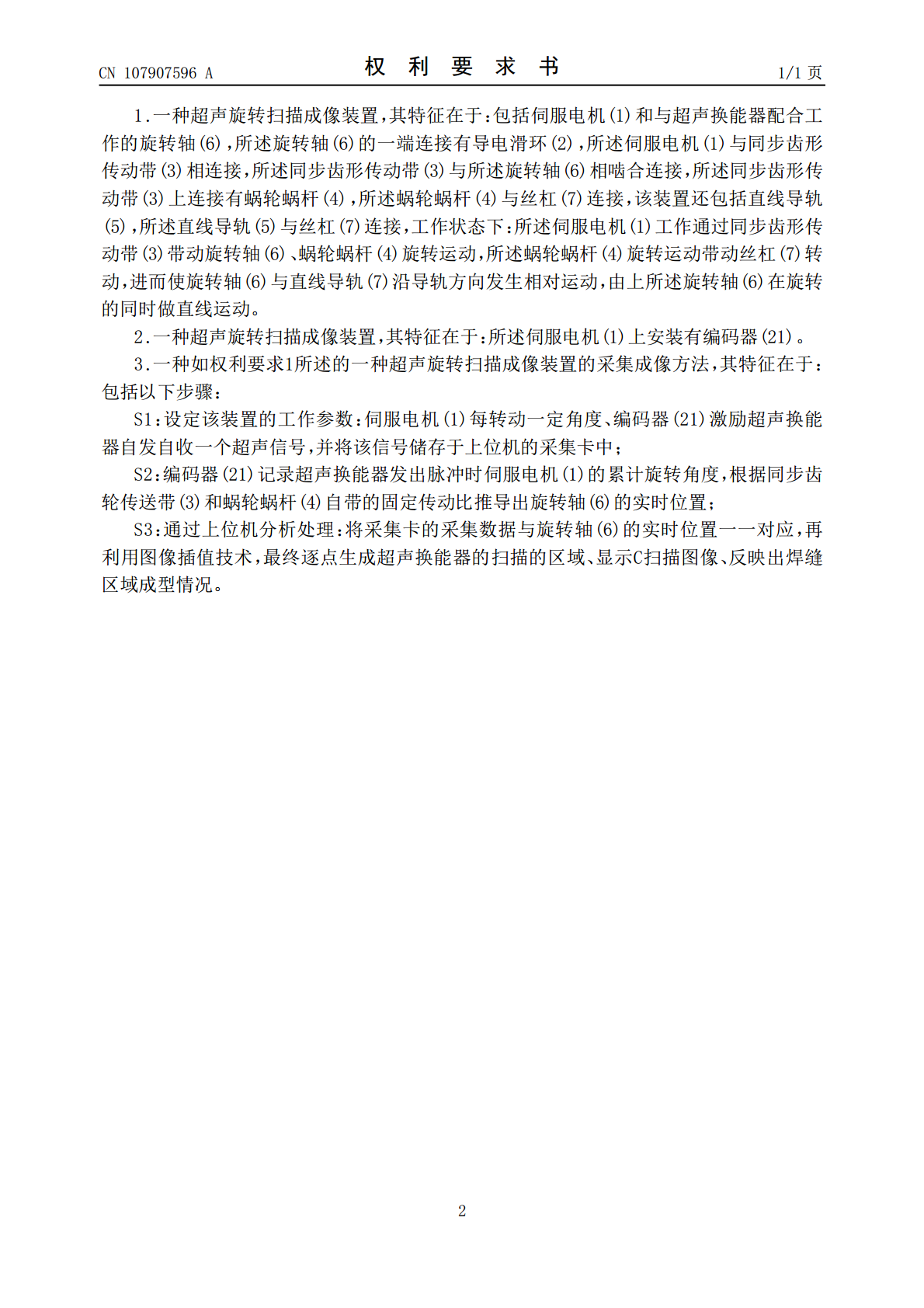
本发明公开了一种超声旋转扫描成像装置和方法,本装置仅用一个电机实现了旋转运动和直线运动相结合扫查方式,具体通过特殊的蜗轮蜗杆和齿轮组结构保证旋转运动和水平平移的高度匹配。工作状态下:所述伺服电机工作通过同步齿形传动带带动旋转轴、蜗轮蜗杆旋转运动,所述蜗轮蜗杆旋转运动带动丝杠转动,进而使旋转轴与直线导轨沿导轨方向发生相对运动,由上所述旋转轴在旋转的同时做直线运动。并在高速旋转直线运动时,实现超声信号同步触发和采集,确保数据点和采集位置的准确对应,便于超声扫描成像,该装置可用于搭接结构点焊、激光焊成像检测。
超声造影成像方法、超声成像装置和存储介质.pdf
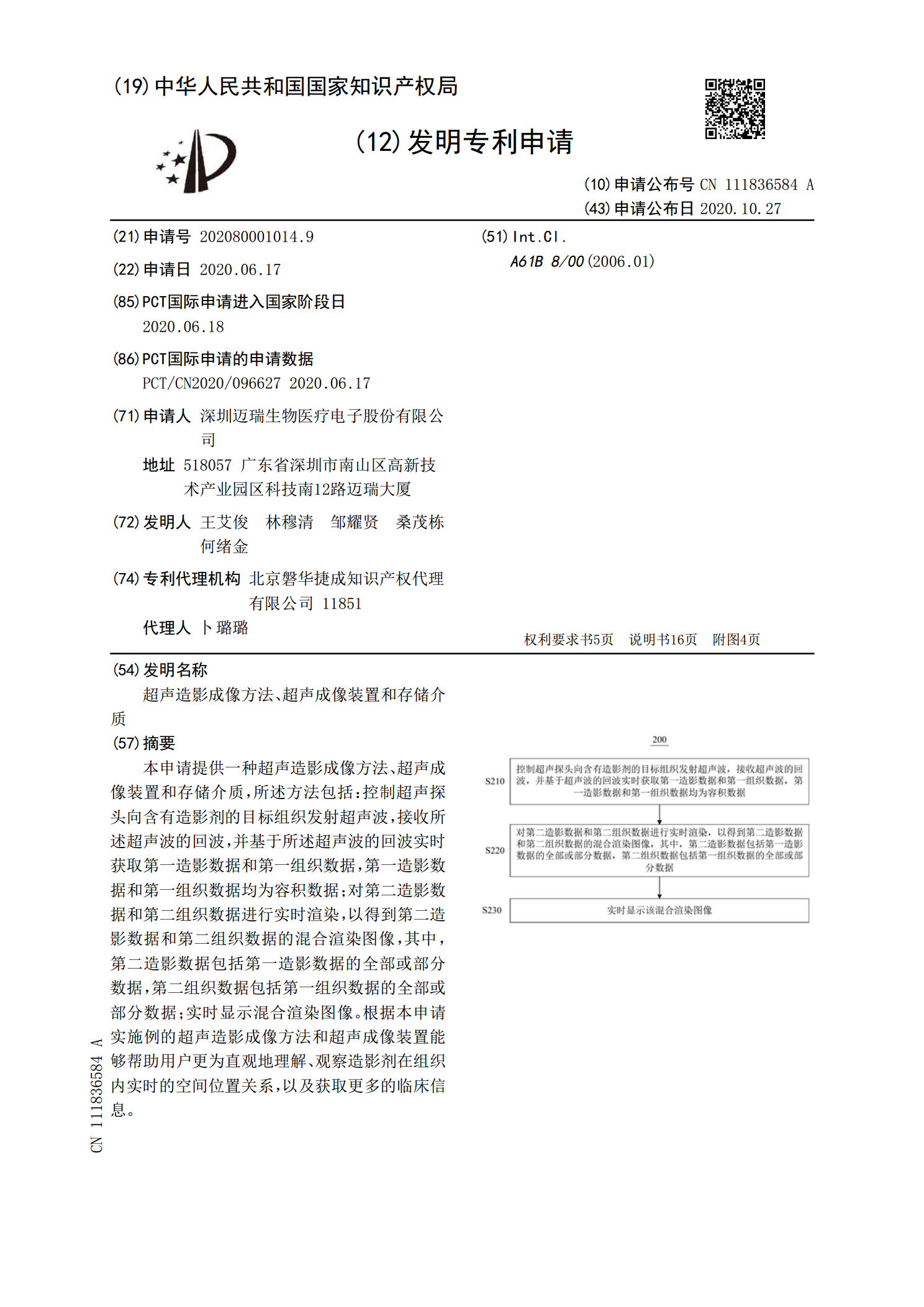
本申请提供一种超声造影成像方法、超声成像装置和存储介质,所述方法包括:控制超声探头向含有造影剂的目标组织发射超声波,接收所述超声波的回波,并基于所述超声波的回波实时获取第一造影数据和第一组织数据,第一造影数据和第一组织数据均为容积数据;对第二造影数据和第二组织数据进行实时渲染,以得到第二造影数据和第二组织数据的混合渲染图像,其中,第二造影数据包括第一造影数据的全部或部分数据,第二组织数据包括第一组织数据的全部或部分数据;实时显示混合渲染图像。根据本申请实施例的超声造影成像方法和超声成像装置能够帮助用户更为
超声成像方法、装置、超声成像设备和存储介质.pdf
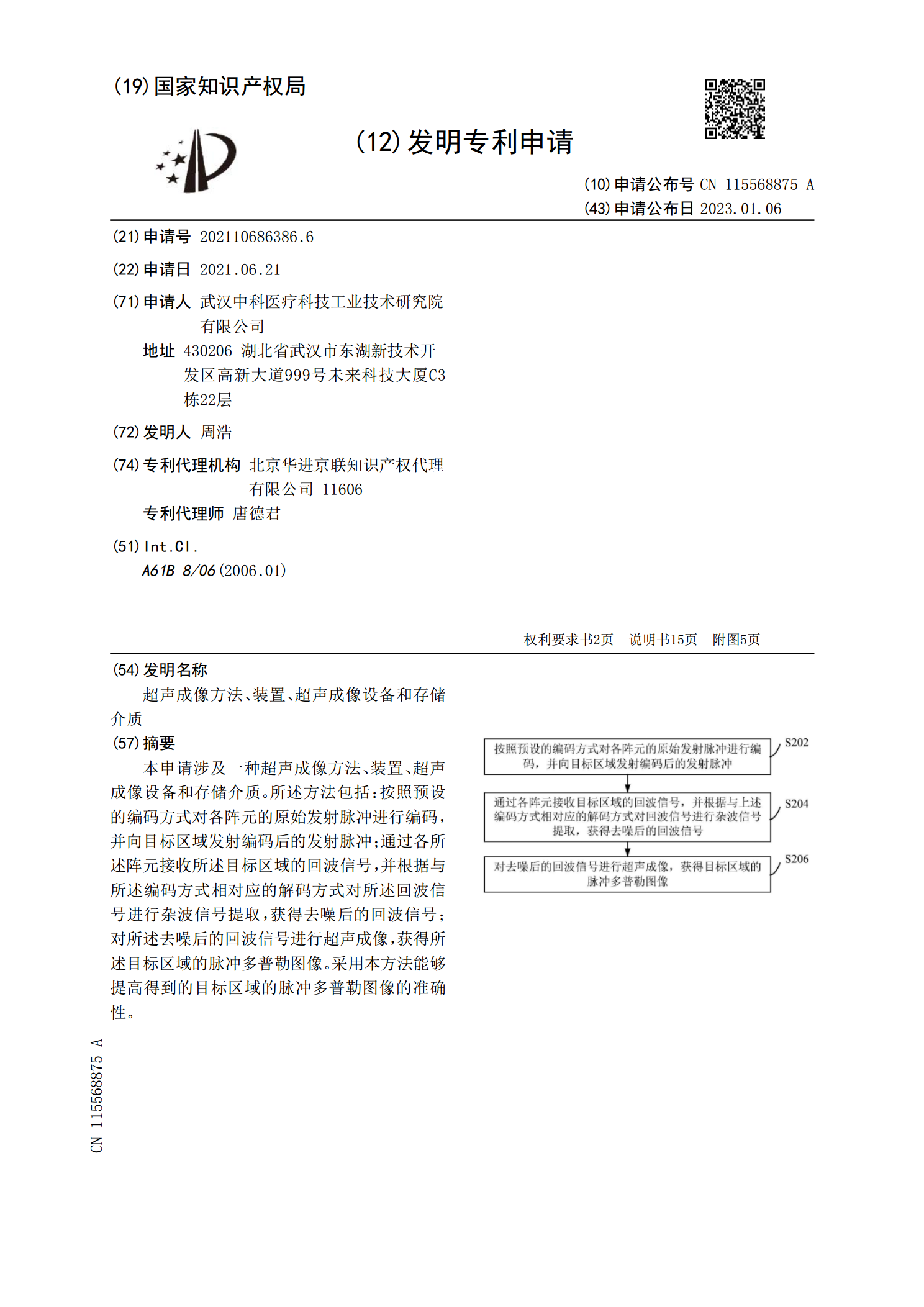
本申请涉及一种超声成像方法、装置、超声成像设备和存储介质。所述方法包括:按照预设的编码方式对各阵元的原始发射脉冲进行编码,并向目标区域发射编码后的发射脉冲;通过各所述阵元接收所述目标区域的回波信号,并根据与所述编码方式相对应的解码方式对所述回波信号进行杂波信号提取,获得去噪后的回波信号;对所述去噪后的回波信号进行超声成像,获得所述目标区域的脉冲多普勒图像。采用本方法能够提高得到的目标区域的脉冲多普勒图像的准确性。

超声造影成像方法和装置.pdf
本发明提供了一种超声造影成像方法和装置,该方法包括:控制第一超声探头向目标对象的肝脏区域发射第一超声波;基于第一超声回波信号生成第一超声图像,获取第一超声图像上的感兴趣区域,以用于确定肝脏区域内待进行造影成像的位置区域;在造影剂被注射到目标对象的情况下,控制第一超声探头向位置区域发射第二超声波;在造影剂注射后且满足预设条件时,控制第二超声探头向肝脏区域的门静脉区域发射第三超声波,第三超声波用于爆破门静脉中造影剂产生的微泡,第二超声波的发射和第三超声波的发射是交替进行的或是各自独立进行的;基于第二超声回波信
一种微凸超声成像扫描装置、系统和方法.pdf
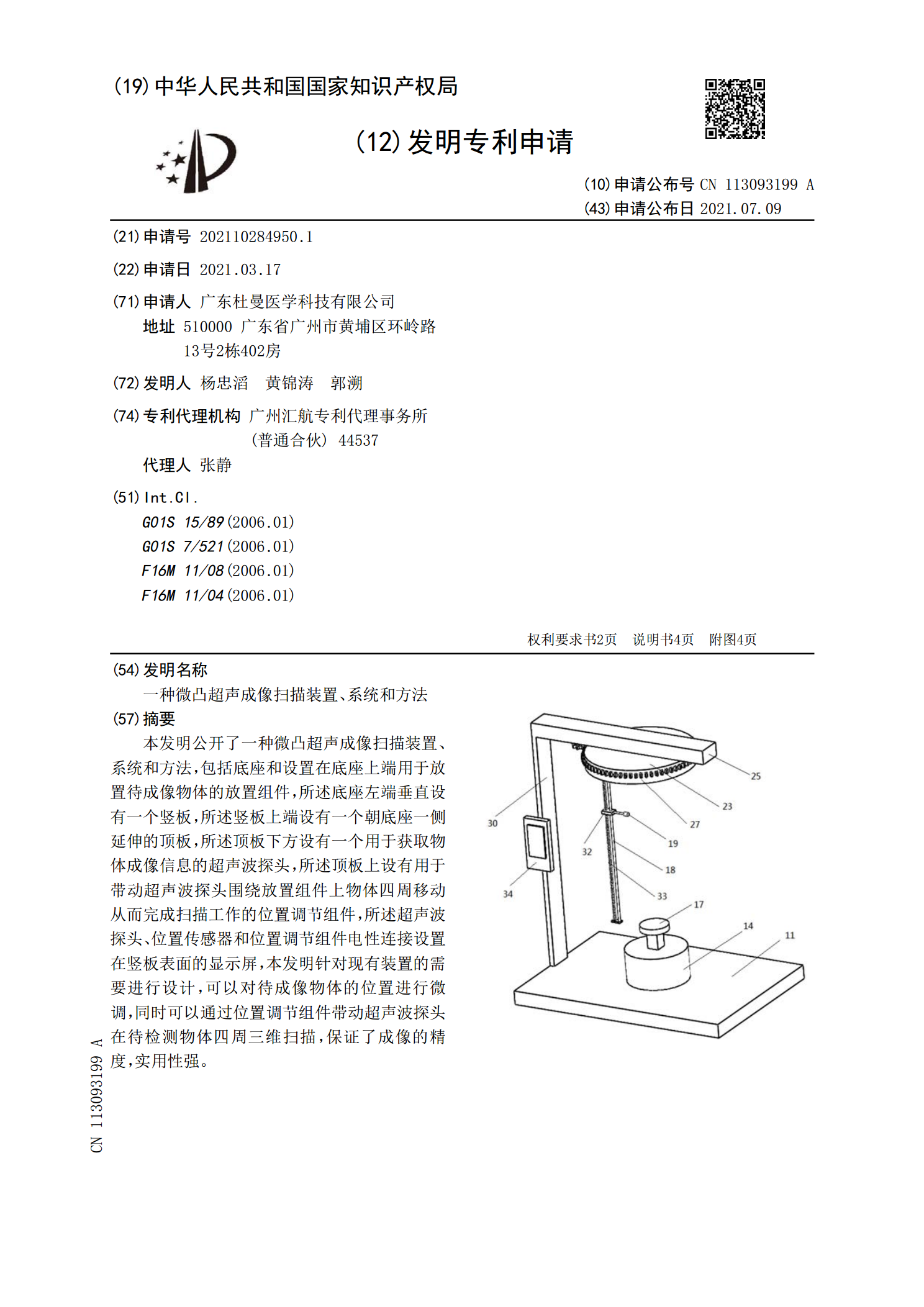
本发明公开了一种微凸超声成像扫描装置、系统和方法,包括底座和设置在底座上端用于放置待成像物体的放置组件,所述底座左端垂直设有一个竖板,所述竖板上端设有一个朝底座一侧延伸的顶板,所述顶板下方设有一个用于获取物体成像信息的超声波探头,所述顶板上设有用于带动超声波探头围绕放置组件上物体四周移动从而完成扫描工作的位置调节组件,所述超声波探头、位置传感器和位置调节组件电性连接设置在竖板表面的显示屏,本发明针对现有装置的需要进行设计,可以对待成像物体的位置进行微调,同时可以通过位置调节组件带动超声波探头在待检测物体四