
多自由度中空协作机械臂采用的关节模块.pdf

佳宁****么啦


1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

多自由度中空协作机械臂采用的关节模块.pdf
本发明公开了一种多自由度中空协作机械臂用的关节模块,包括外壳,外壳顶部安装端盖,外壳内上部固定金属支架,金属支架固定有套筒,套筒顶面固定电磁铁端盖,电磁铁端盖固定电磁铁。制动轴上部设置在电磁铁下面的套筒内,下部固定制动体,套筒和制动体之间的制动轴套有弹簧,制动体底壁和外壳内腔底壁附着摩擦材料。减速器固定在外壳底部,其波发生器上固定有减速器带轮和刹车片,伺服电机滑块机构可在金属支架上滑动,依靠螺钉固定,伺服电机轴上固定有带轮,减速器带轮和伺服电机带轮通过同步齿形带相连;外壳侧壁上设置一凸台,开有阶梯孔,阶梯

一种七自由度协作机械臂用的模块化关节.pdf
本发明公开了一种七自由度协作机械臂用的模块化关节,包括外壳,外壳顶部安装有端盖,外壳内上部固定有金属支架,金属支架的顶面固定有伺服电机固定板,伺服电机固定板顶部固定有伺服电机,底壁固定失电制动器,电机齿轮凸台插在失电制动器转子凹槽内,电机齿轮套装固定在电机轴上,减速器固定在外壳底部,减速器波发生器上部固定有减速器齿轮,波发生器轴段上套有一底部密封圈,减速器柔轮底面开有多个连接另一模块化关节用的螺纹孔,减速器齿轮和电机齿轮彼此啮合配合;外壳的侧壁上设置有一凸台,开有阶梯孔,阶梯孔的轴线与减速器轴线共面并相互

两个自由度的机械臂关节模块.pdf
两个自由度的机械臂关节模块,它涉及一种机械臂关节模块。本发明的目的是为解决目前现有机械臂关节为单轴组合构成,几个自由度间不同心,控制难度大和连接复杂的问题。第一输出转盘与第一输出转轴传动连接,第一输出转轴固定在第一固定架上,第一随动转盘装在第二侧壁上,第一齿轮与第一输出转轴固接,第一齿轮与第一减速机构的输入端啮合,第一减速机构的输出端与第二齿轮啮合,第一减速机构固装在第一固定架上,第二齿轮装在第一电机的输出轴上;第二输出转盘的传动结构与第一输出转盘相同,第二输出转盘与第一输出转盘垂直设置。本发

集成两自由度的紧凑型机械臂关节模块.pdf
本发明提出的集成两自由度的紧凑型机械臂关节模块包括电机减速器导轨单元、齿轮齿条传动单元、箱体支撑单元、驱动控制单元与外部连接单元。电机减速器导轨单元和齿轮齿条传动单元由箱体支撑单元完成定位和支撑,其传感器和电机接线经过合理布局连接到驱动控制器上,由驱动控制单元负责传感器信号的采集处理与电机的控制;电机减速器导轨单元在伺服电机的作用下经过机械传动将伺服电机的扭矩传递给圆柱齿条,从而带动安装在圆柱齿条的外接法兰旋转运动,齿轮齿条传动单元在直驱电机的带动下经过齿轮传动带动圆柱齿条直线运动,从而带动安装圆柱齿条上
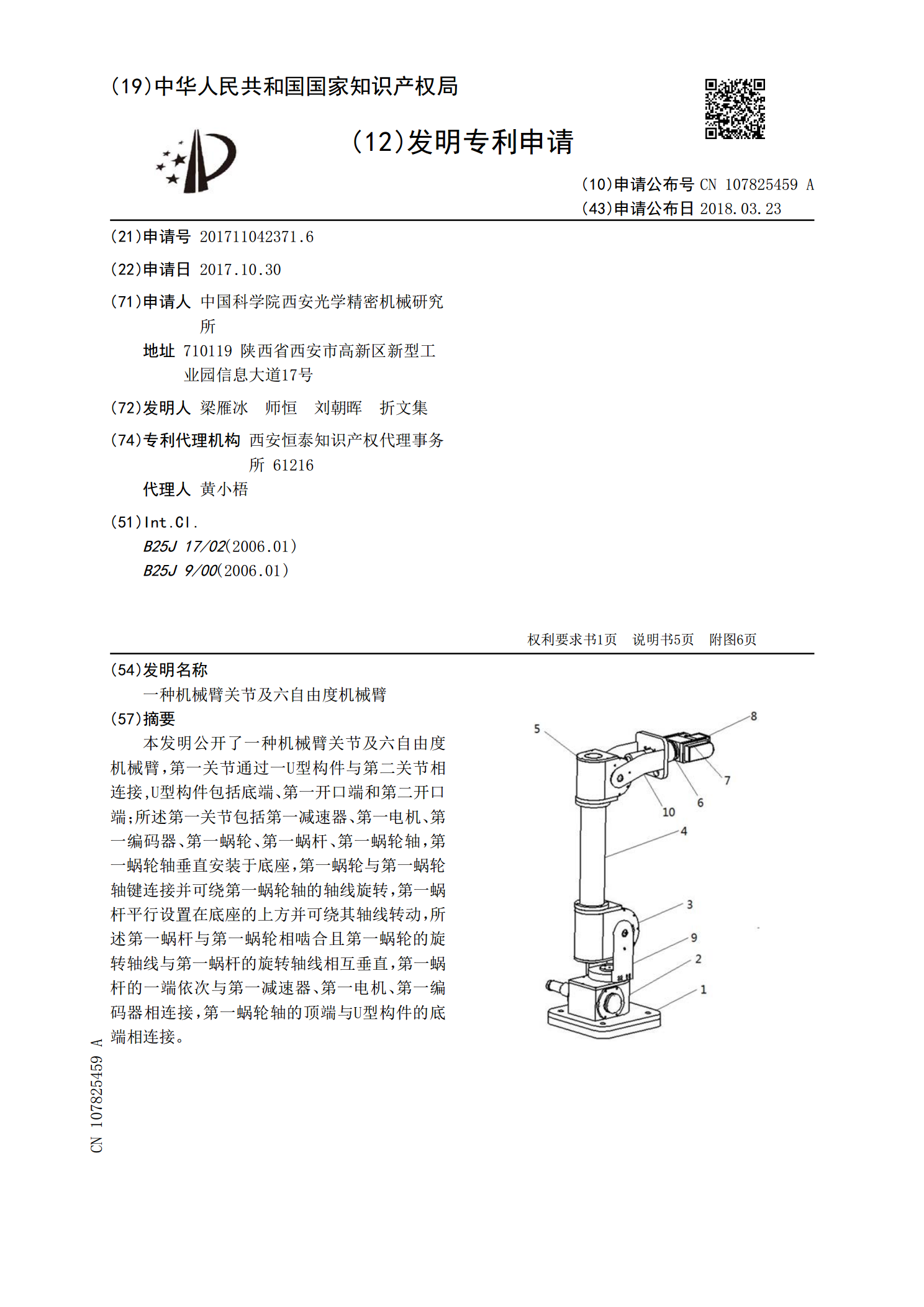
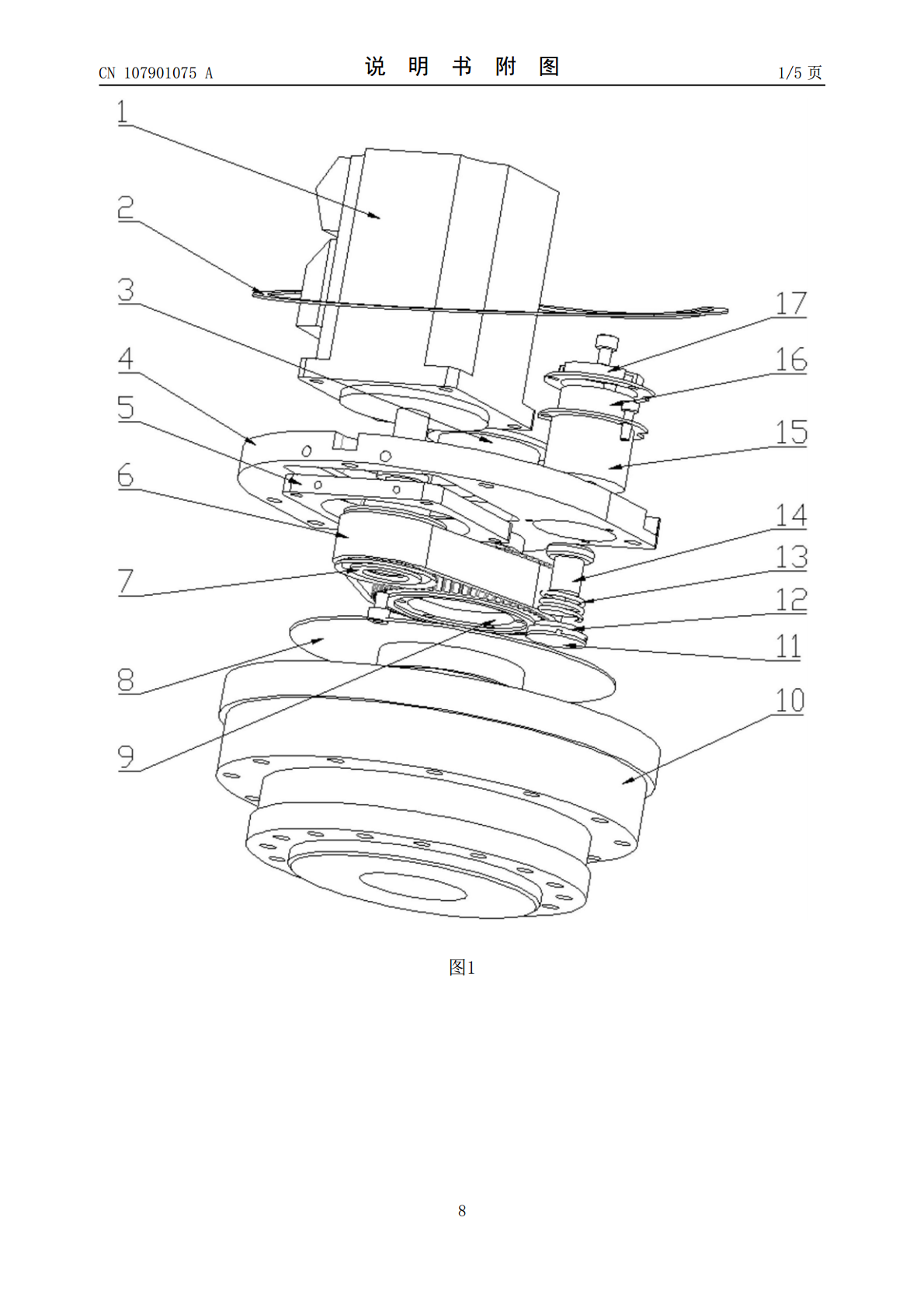
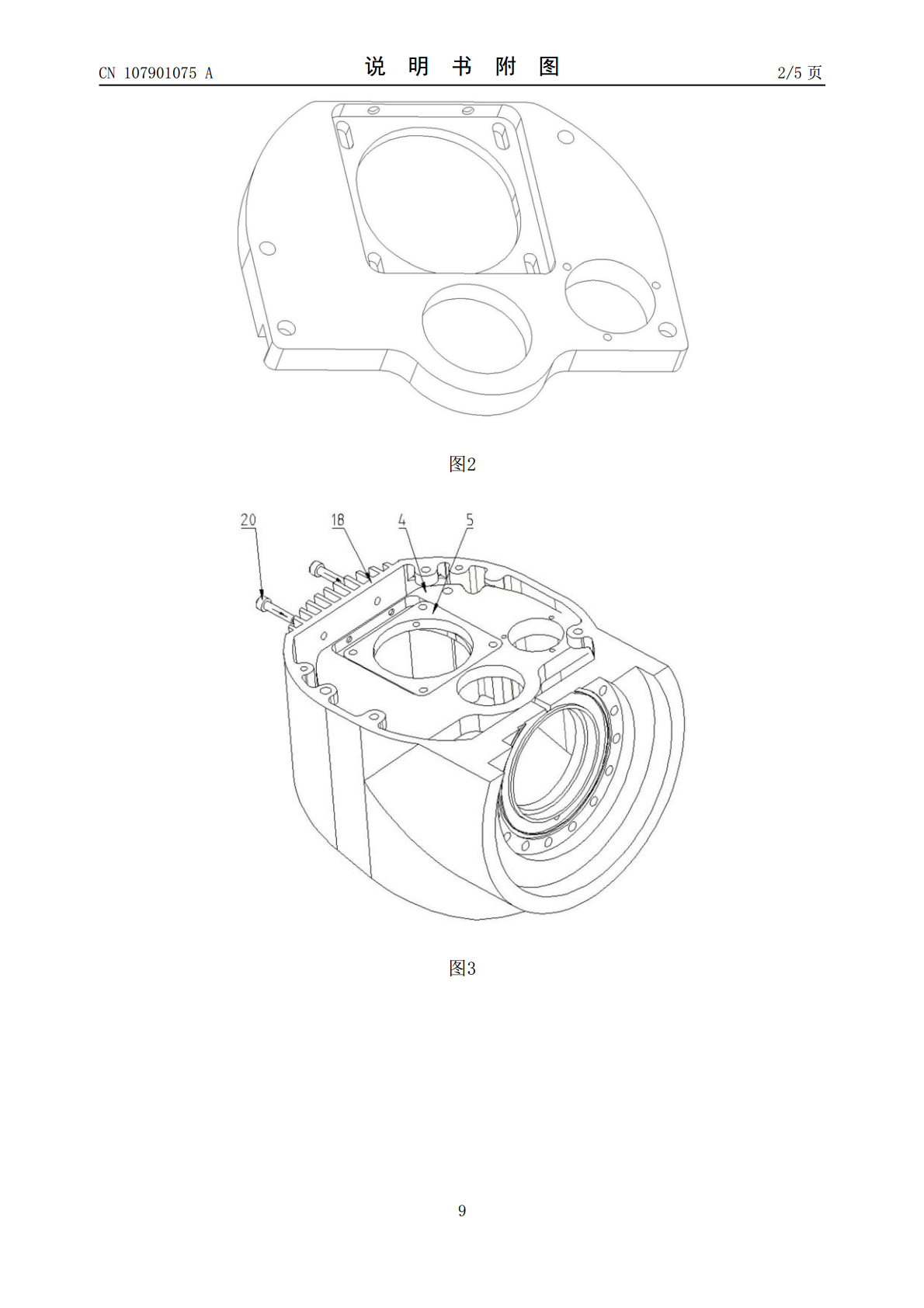
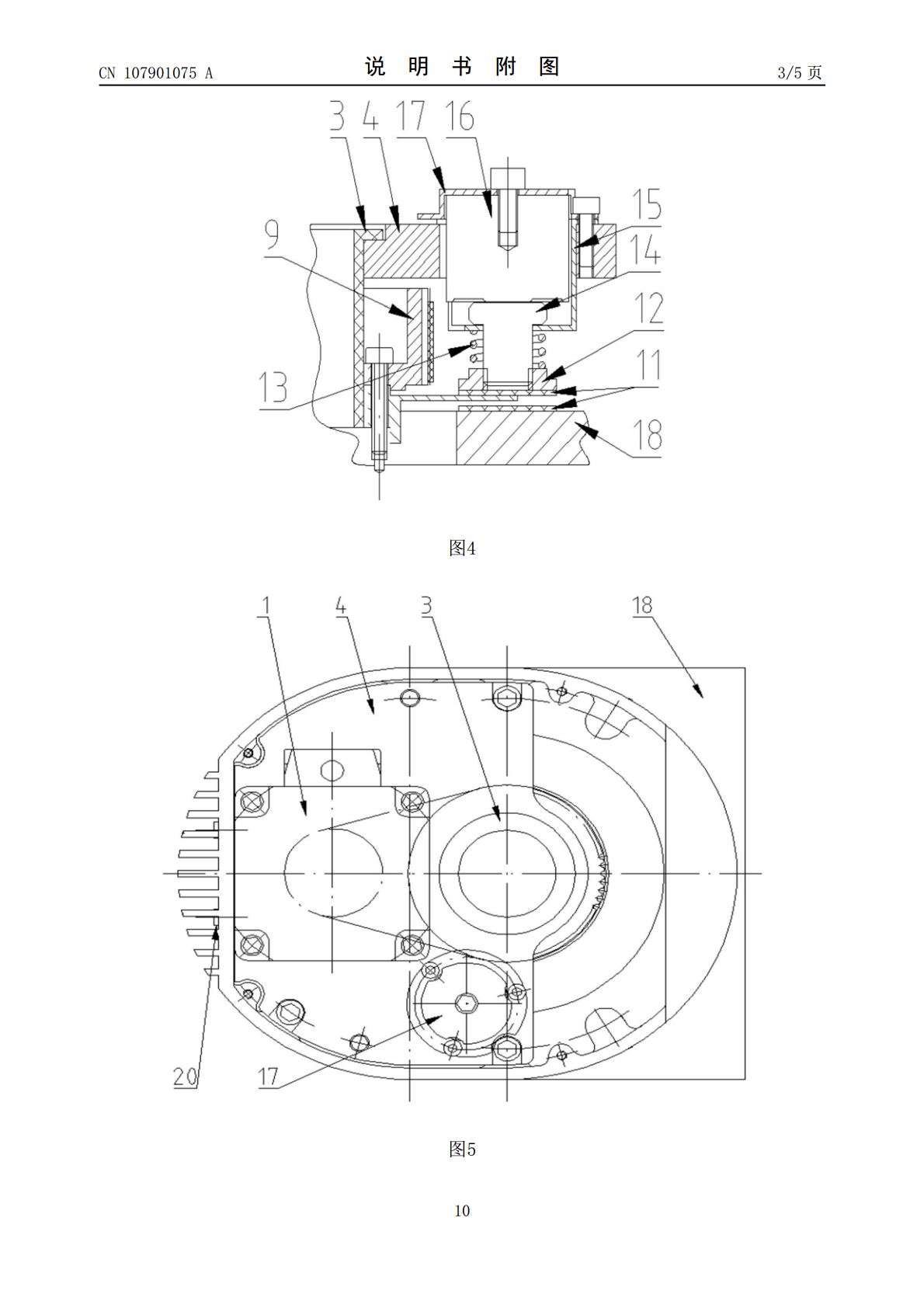
一种机械臂关节及六自由度机械臂.pdf
本发明公开了一种机械臂关节及六自由度机械臂,第一关节通过一U型构件与第二关节相连接,U型构件包括底端、第一开口端和第二开口端;所述第一关节包括第一减速器、第一电机、第一编码器、第一蜗轮、第一蜗杆、第一蜗轮轴,第一蜗轮轴垂直安装于底座,第一蜗轮与第一蜗轮轴键连接并可绕第一蜗轮轴的轴线旋转,第一蜗杆平行设置在底座的上方并可绕其轴线转动,所述第一蜗杆与第一蜗轮相啮合且第一蜗轮的旋转轴线与第一蜗杆的旋转轴线相互垂直,第一蜗杆的一端依次与第一减速器、第一电机、第一编码器相连接,第一蜗轮轴的顶端与U型构件的底端相连接