
一种全自动瑕疵检测装置.pdf

建英****66


1/9

2/9
3/9
4/9

5/9

6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种全自动瑕疵检测装置.pdf
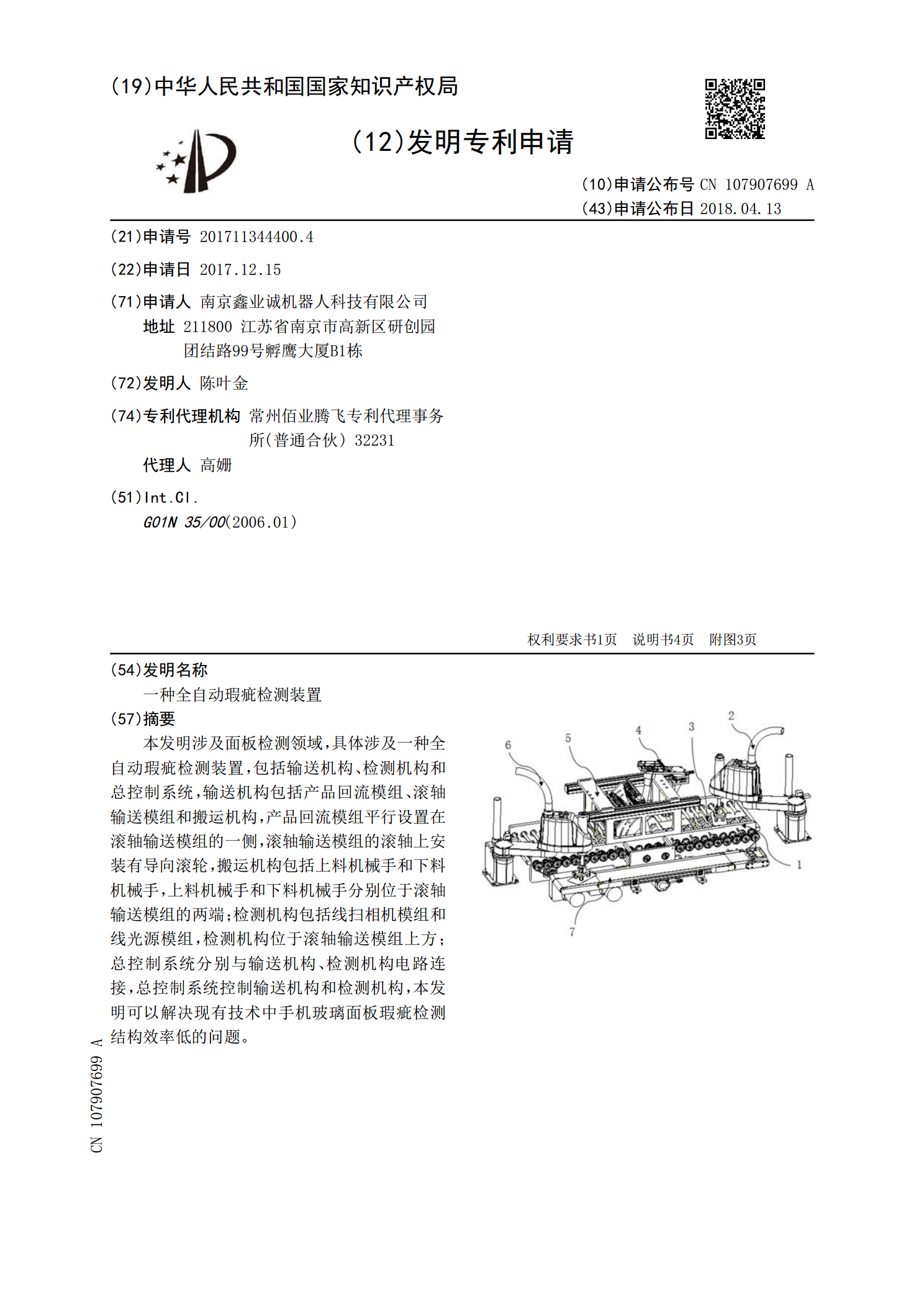
本发明涉及面板检测领域,具体涉及一种全自动瑕疵检测装置,包括输送机构、检测机构和总控制系统,输送机构包括产品回流模组、滚轴输送模组和搬运机构,产品回流模组平行设置在滚轴输送模组的一侧,滚轴输送模组的滚轴上安装有导向滚轮,搬运机构包括上料机械手和下料机械手,上料机械手和下料机械手分别位于滚轴输送模组的两端;检测机构包括线扫相机模组和线光源模组,检测机构位于滚轴输送模组上方;总控制系统分别与输送机构、检测机构电路连接,总控制系统控制输送机构和检测机构,本发明可以解决现有技术中手机玻璃面板瑕疵检测结构效率低的问
一种口罩瑕疵缺陷检测装置.pdf
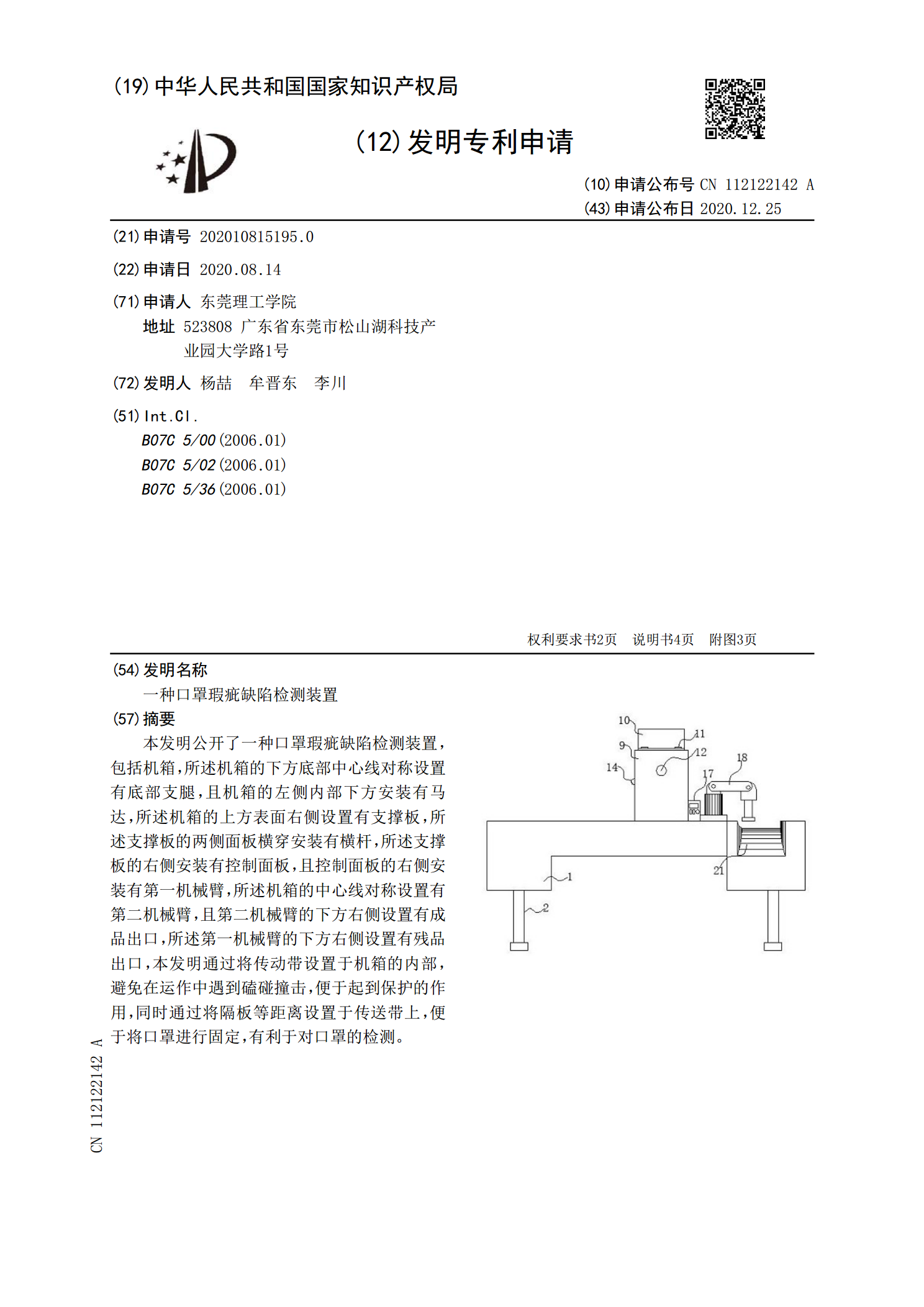
本发明公开了一种口罩瑕疵缺陷检测装置,包括机箱,所述机箱的下方底部中心线对称设置有底部支腿,且机箱的左侧内部下方安装有马达,所述机箱的上方表面右侧设置有支撑板,所述支撑板的两侧面板横穿安装有横杆,所述支撑板的右侧安装有控制面板,且控制面板的右侧安装有第一机械臂,所述机箱的中心线对称设置有第二机械臂,且第二机械臂的下方右侧设置有成品出口,所述第一机械臂的下方右侧设置有残品出口,本发明通过将传动带设置于机箱的内部,避免在运作中遇到磕碰撞击,便于起到保护的作用,同时通过将隔板等距离设置于传送带上,便于将口罩进行
一种手机玻璃面板瑕疵检测装置.pdf
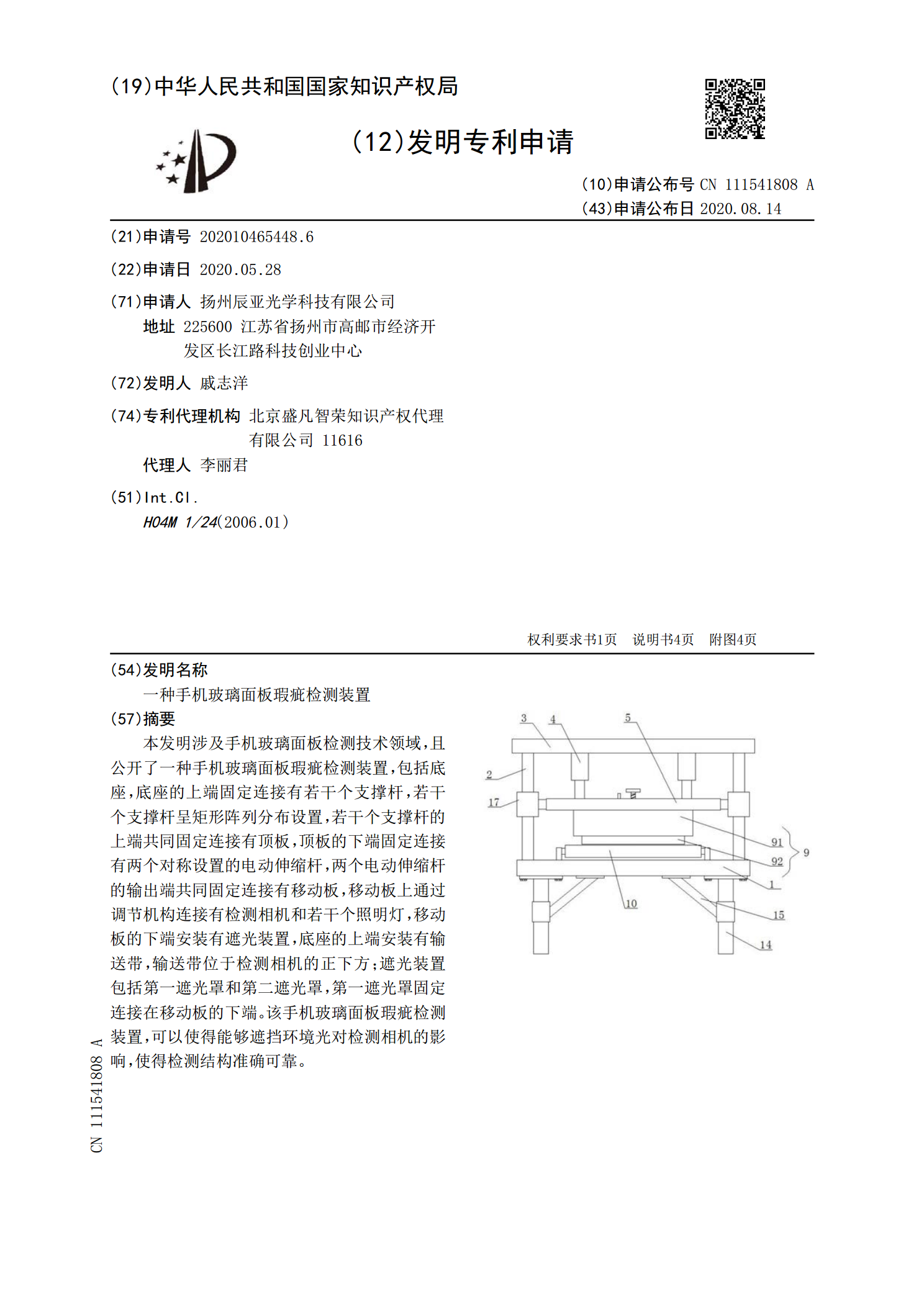
本发明涉及手机玻璃面板检测技术领域,且公开了一种手机玻璃面板瑕疵检测装置,包括底座,底座的上端固定连接有若干个支撑杆,若干个支撑杆呈矩形阵列分布设置,若干个支撑杆的上端共同固定连接有顶板,顶板的下端固定连接有两个对称设置的电动伸缩杆,两个电动伸缩杆的输出端共同固定连接有移动板,移动板上通过调节机构连接有检测相机和若干个照明灯,移动板的下端安装有遮光装置,底座的上端安装有输送带,输送带位于检测相机的正下方;遮光装置包括第一遮光罩和第二遮光罩,第一遮光罩固定连接在移动板的下端。该手机玻璃面板瑕疵检测装置,可以
一种表面瑕疵光学检测装置及其检测方法.pdf
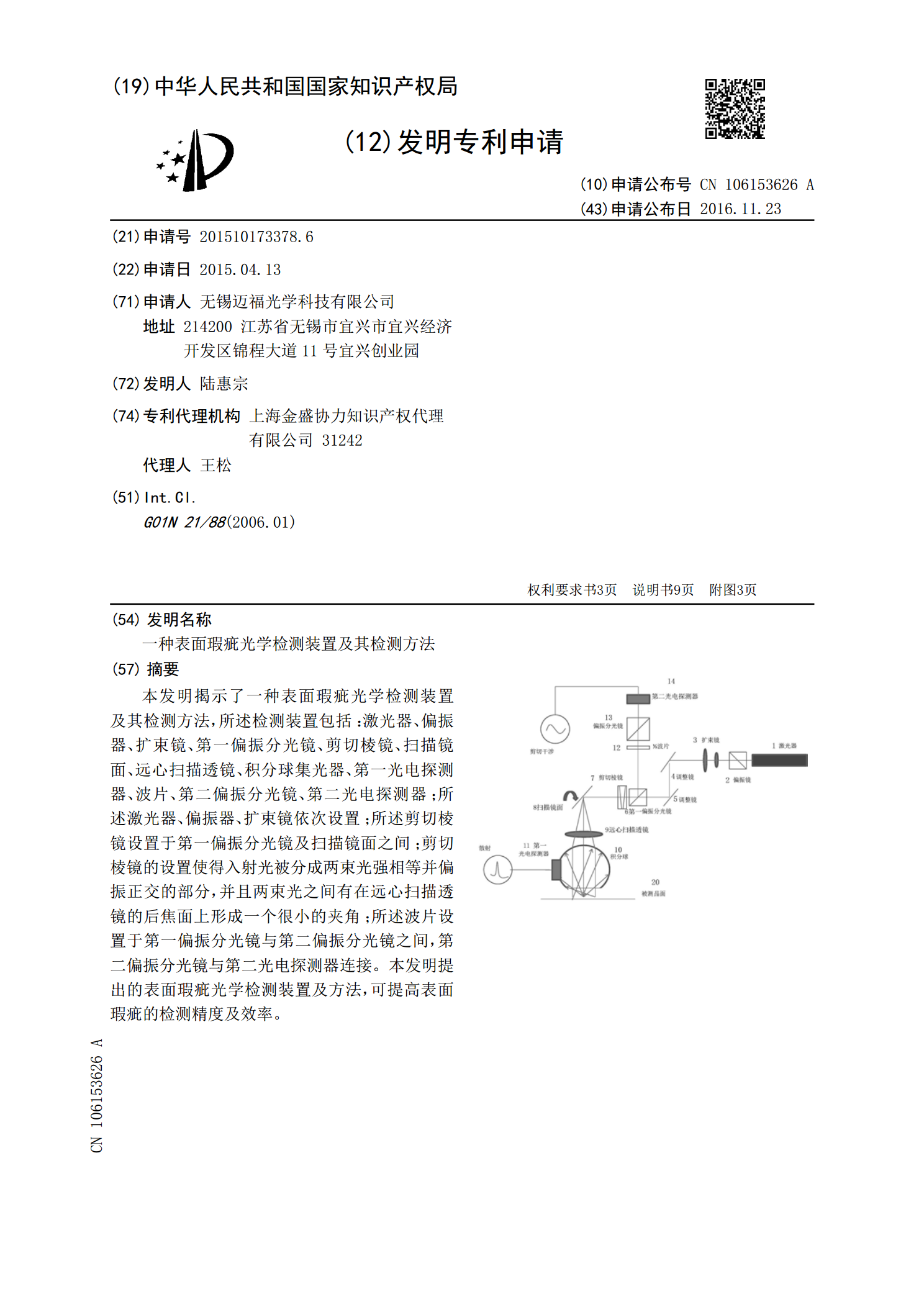
本发明揭示了一种表面瑕疵光学检测装置及其检测方法,所述检测装置包括:激光器、偏振器、扩束镜、第一偏振分光镜、剪切棱镜、扫描镜面、远心扫描透镜、积分球集光器、第一光电探测器、波片、第二偏振分光镜、第二光电探测器;所述激光器、偏振器、扩束镜依次设置;所述剪切棱镜设置于第一偏振分光镜及扫描镜面之间;剪切棱镜的设置使得入射光被分成两束光强相等并偏振正交的部分,并且两束光之间有在远心扫描透镜的后焦面上形成一个很小的夹角;所述波片设置于第一偏振分光镜与第二偏振分光镜之间,第二偏振分光镜与第二光电探测器连接。本发明提出

一种布料瑕疵视觉检测装置及检测方法.pdf
本发明公开了一种布料瑕疵视觉检测装置及检测方法,属于缝纫辅助设备技术领域。包括:输送架的上端面放置有持续移动的布料,输送架上设置有强光源,强光源照向布料的下侧面,送布机构设置在输送架的一端,送布机构包括主动辊和从动辊,主动辊和从动辊能绕各自轴线方向旋转,视觉支架横跨于输送架的上方,视觉支架朝向输送架的一侧设置有若干检测相机,检测相机的视觉范围能覆盖布料的宽度方向,贴标机横跨于输送架的上方,且位于视觉支架背离送布机构的一侧,贴标机在布料检测到瑕疵位置处留下标记。本发明提供的一种布料瑕疵视觉检测装置及检测方法