
一种用于物品装卸和障碍救援的多功能机器人.pdf

Ro****44


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于物品装卸和障碍救援的多功能机器人.pdf
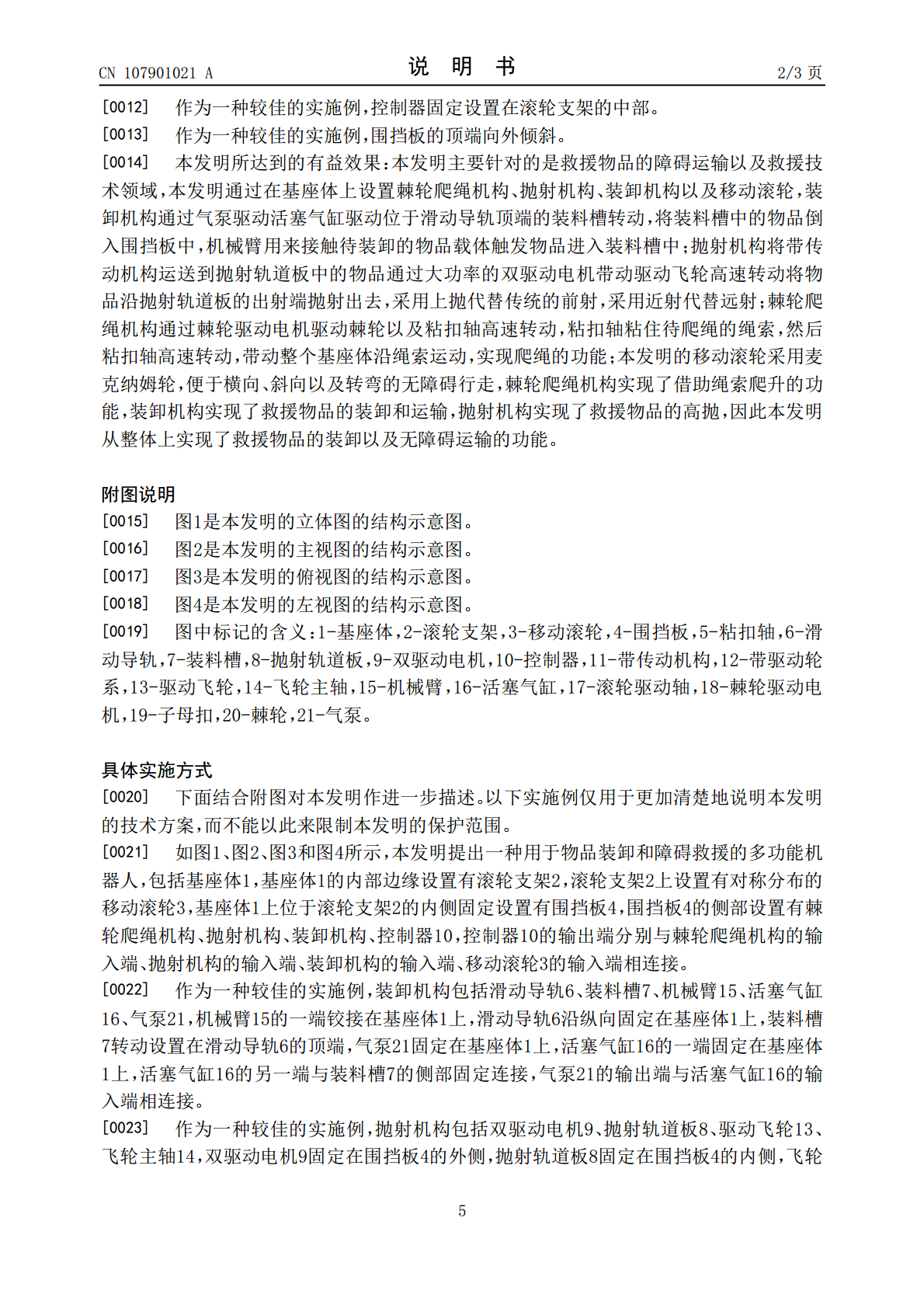
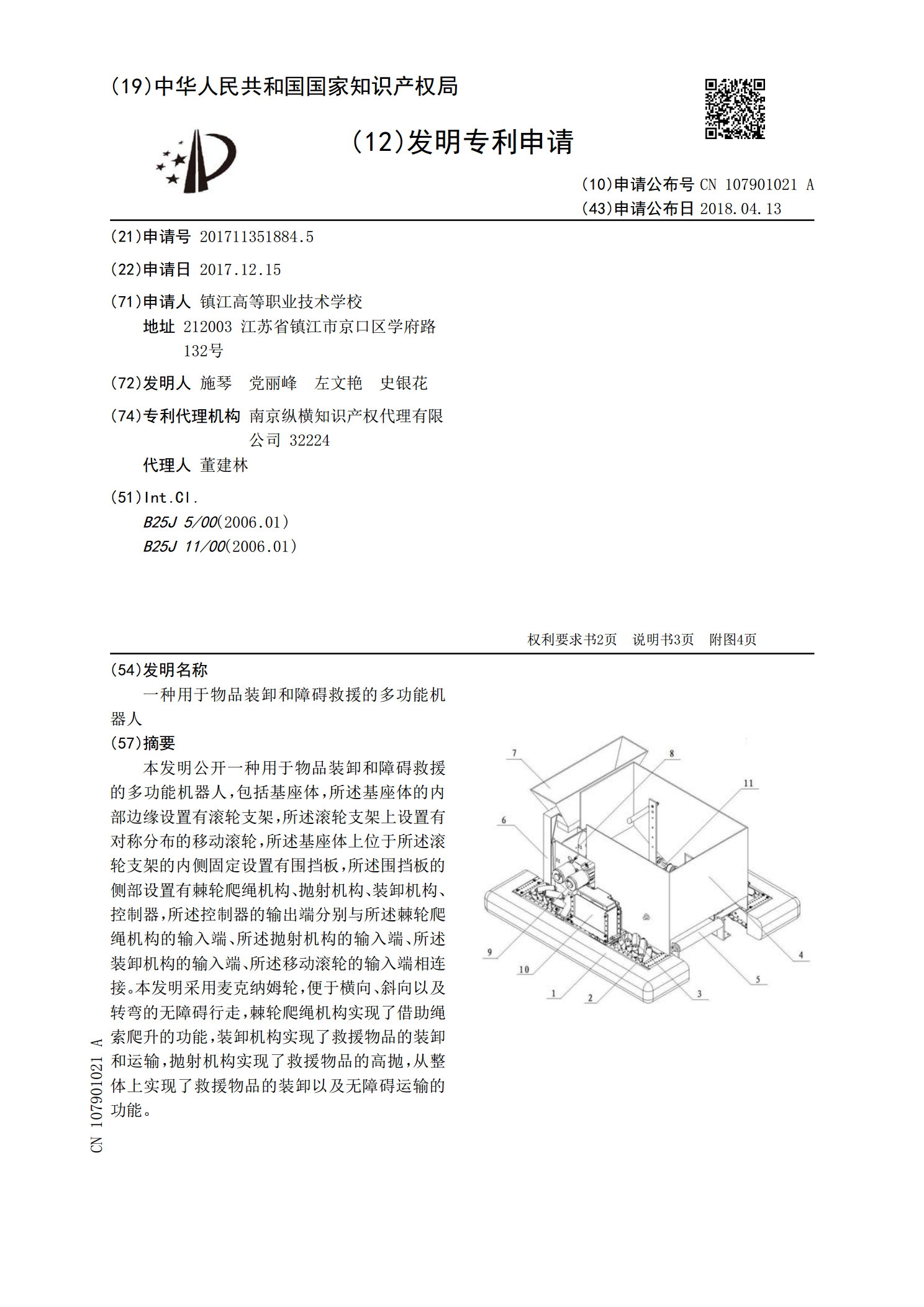
本发明公开一种用于物品装卸和障碍救援的多功能机器人,包括基座体,所述基座体的内部边缘设置有滚轮支架,所述滚轮支架上设置有对称分布的移动滚轮,所述基座体上位于所述滚轮支架的内侧固定设置有围挡板,所述围挡板的侧部设置有棘轮爬绳机构、抛射机构、装卸机构、控制器,所述控制器的输出端分别与所述棘轮爬绳机构的输入端、所述抛射机构的输入端、所述装卸机构的输入端、所述移动滚轮的输入端相连接。本发明采用麦克纳姆轮,便于横向、斜向以及转弯的无障碍行走,棘轮爬绳机构实现了借助绳索爬升的功能,装卸机构实现了救援物品的装卸和运输,
一种多功能救援机器人.pdf
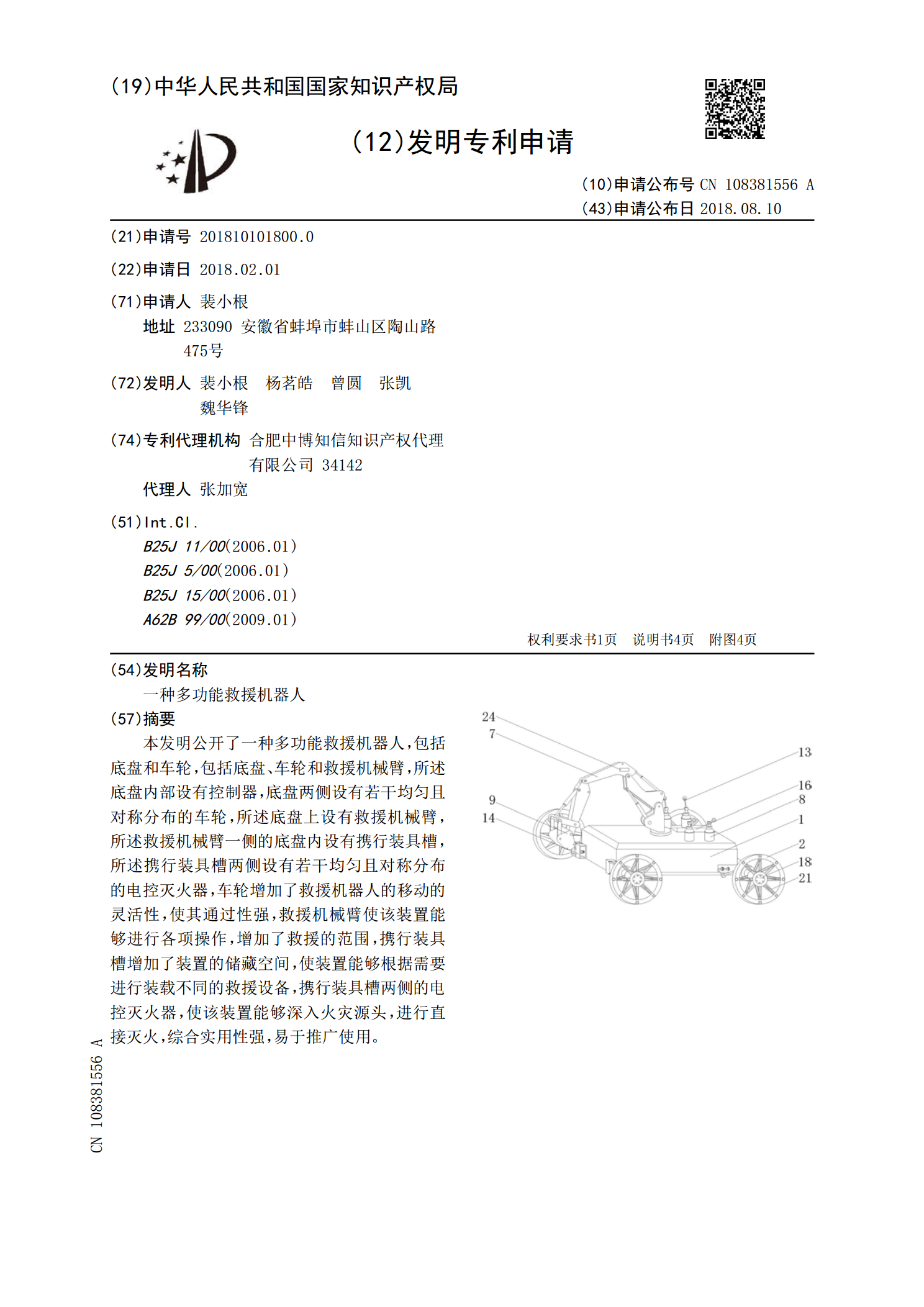
本发明公开了一种多功能救援机器人,包括底盘和车轮,包括底盘、车轮和救援机械臂,所述底盘内部设有控制器,底盘两侧设有若干均匀且对称分布的车轮,所述底盘上设有救援机械臂,所述救援机械臂一侧的底盘内设有携行装具槽,所述携行装具槽两侧设有若干均匀且对称分布的电控灭火器,车轮增加了救援机器人的移动的灵活性,使其通过性强,救援机械臂使该装置能够进行各项操作,增加了救援的范围,携行装具槽增加了装置的储藏空间,使装置能够根据需要进行装载不同的救援设备,携行装具槽两侧的电控灭火器,使该装置能够深入火灾源头,进行直接灭火,综

一种用于医疗救援的多功能担架.pdf
本发明提供一种用于医疗救援的多功能担架,包括第一支撑板,第一支撑板通过其右端设置的第一转轴铰接有第二支撑板,第二支撑板通过其右端设置的第二转轴铰接有第三支撑板,第二支撑板上表面的两侧均固定安装有防护栏,第二支撑板的左右两侧均固定安装有两个第一连接座,第一支撑板和第三支撑板的左右两侧均固定安装有第二连接座,第一支撑板和第三支撑板背面的一侧均固定安装有卷尺,涉及医疗器械领域。该用于医疗救援的多功能担架,不仅可以当做担架使用,而且可以将第一支撑板和第三支撑板进行转动,然后利用支撑杆支撑住地面,就可以将担架当做座

一种多功能爬绳救援机器人.pdf
本发明涉及救援机器人技术领域,公开了一种多功能爬绳救援机器人,包括主动齿轮、第一从动齿轮组件、第二从动齿轮组件、滚轮组件、卷绕绳、驱动电机、电机驱动电路、主控模块和遥控模块,所述主动齿轮、第一从动齿轮组件、第二从动齿轮组件和滚轮组件依次排列,所述驱动电机通过驱动轴与主动齿轮连接,所述电机驱动电路与驱动电机连接,所述主控模块与电机驱动电路连接,所述遥控模块与主控模块无线连接。本发明的救援机器人可以携带逃生工具、安装电子探测设备,进入危险地域,并且受人远程控制,能快速完成任务。

一种多功能仓储物流装卸机器人装置.pdf
本发明公开了一种多功能仓储物流装卸机器人装置,包括机架台以及设在所述机架台上端端面的第一机箱,所述第一机箱左端设有第二机箱,所述第二机箱内设有第一电机,所述第一电机右端末端动力连接有左右延伸的第一转动轴,所述第一转动轴右端末端伸入所述第一机箱箱体内部且设有第一锥齿轮,所述第一机箱内转动配合连接有前后延伸的第一转动轴,所述第一转动轴前后延伸末端贯穿所述第一机箱前后端面且在末端设有上下延伸的第一转动杆,所述第一转动轴上设有位于所述第一机箱内的第二锥齿轮,所述第二锥齿轮与所述第一锥齿轮齿合连接;本发明结构简单,