
基于剖分轮和机械臂的巡线机器人机械结构及其越障方法.pdf

是秋****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于剖分轮和机械臂的巡线机器人机械结构及其越障方法.pdf
本发明公开了一种基于剖分轮和机械臂的巡线机器人机械结构及其越障方法,属于机器人技术领域。所述基于剖分轮和机械臂的巡线机器人机械结构包括机架,所述机架的四个角分别设置有可沿所述机架的行走方向前后屈伸的第一机械臂、第二机械臂、第三机械臂和第四机械臂;所述机架的中间位置设置有可沿所述机架的行走方向收缩的第一滚轮臂和第二滚轮臂。与现有技术相比,本发明具有减轻劳动强度、降低运行成本,且能够翻越障碍物的优点。

基于剖分轮和机械臂的巡线机器人机械结构及其越障方法.pdf
本发明公开了一种基于剖分轮和机械臂的巡线机器人机械结构及其越障方法,属于机器人技术领域。所述基于剖分轮和机械臂的巡线机器人机械结构包括机架,所述机架的四个角分别设置有可沿所述机架的行走方向前后屈伸的第一机械臂、第二机械臂、第三机械臂和第四机械臂;所述机架的中间位置设置有可沿所述机架的行走方向收缩的第一滚轮臂和第二滚轮臂。与现有技术相比,本发明具有减轻劳动强度、降低运行成本,且能够翻越障碍物的优点。

环形包臂巡线机器人机械结构及其越障方法.pdf
本发明公开了一种环形包臂巡线机器人机械结构及其越障方法,属于机器人技术领域。所述环形包臂巡线机器人机械结构包括可升降的第一环形包臂单元、第二环形包臂单元和第三环形包臂单元,其中:各环形包臂单元均包括一对可开合的半圆包臂,各环形包臂单元下方分别设置有第一开合关节、第二开合关节和第三开合关节;各环形包臂单元内部设置有可带动巡线机器人行走的驱动轮;所述第一环形包臂单元和第二环形包臂单元之间以及所述第三环形包臂单元和第二环形包臂单元之间分别设置有第一俯仰关节和第二俯仰关节,所述第二环形包臂单元下方设置有升降机构。
啮合驱动行走轮结构、巡线机器人机械结构及其越障方法.pdf
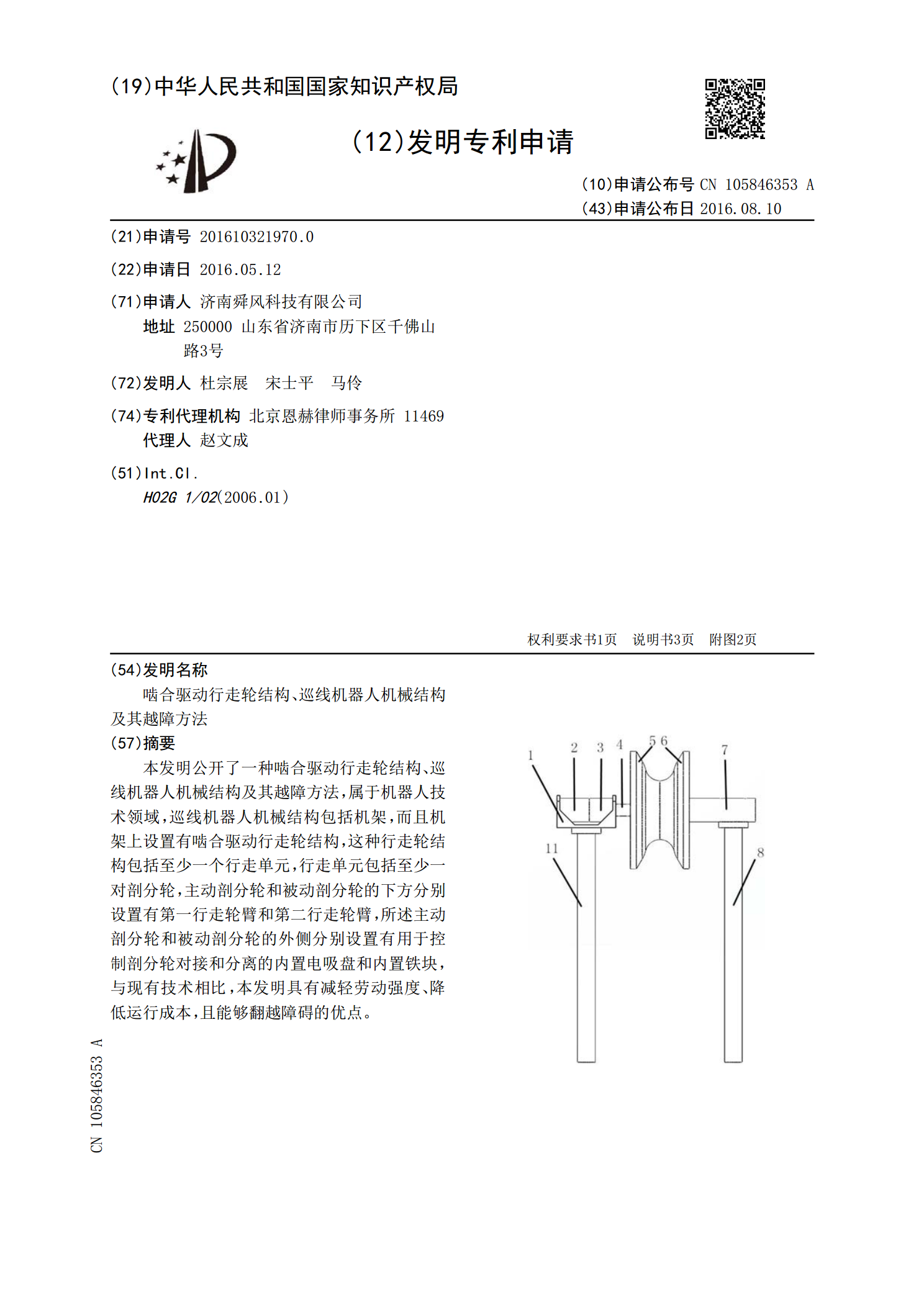
本发明公开了一种啮合驱动行走轮结构、巡线机器人机械结构及其越障方法,属于机器人技术领域,巡线机器人机械结构包括机架,而且机架上设置有啮合驱动行走轮结构,这种行走轮结构包括至少一个行走单元,行走单元包括至少一对剖分轮,主动剖分轮和被动剖分轮的下方分别设置有第一行走轮臂和第二行走轮臂,所述主动剖分轮和被动剖分轮的外侧分别设置有用于控制剖分轮对接和分离的内置电吸盘和内置铁块,与现有技术相比,本发明具有减轻劳动强度、降低运行成本,且能够翻越障碍的优点。

啮合驱动行走轮结构、巡线机器人机械结构及其越障方法.pdf
本发明公开了一种啮合驱动行走轮结构、巡线机器人机械结构及其越障方法,属于机器人技术领域,所述巡线机器人机械结构包括机架,而且机架上设置有啮合驱动行走轮结构,这种行走轮结构包括至少一个行走单元,行走单元包括至少一对剖分轮和一对侧面夹紧轮,主动剖分轮和被动剖分轮的下方分别设置有第一行走轮臂和第二行走轮臂,包络夹紧轮和所述夹紧侧面轮的下方分别设置有第一侧面轮臂和第二侧面轮臂,所述主动剖分轮和被动剖分轮的外侧分别设置有用于控制剖分轮对接和分离的内置电吸盘和内置铁块。与现有技术相比,本发明具有减轻劳动强度、降低运行