
一种用于胃肠镜手术的带力反馈的两自由度主手.pdf

景山****魔王


1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于胃肠镜手术的带力反馈的两自由度主手.pdf
一种用于胃肠镜手术的带力反馈的两自由度主手,属于医疗设备领域,本发明为了解决现有技术中医生在操作肠胃内窥镜输送时无法感知患者体内受到的阻力,极容易对人体内部造成损害,使患者产生不适感的问题,本发明中所述的主手包括基座、旋转关节、主动轮机构、进给带、被动轮机构和两个张紧机构,所述旋转关节固接在基座的一侧,旋转关节中的转动端穿过基座并设置在基座另一侧,主动轮机构设置在基座的另一侧,且主动轮机构与旋转关节的转动端固定连接,被动轮机构通过两个张紧机构固接在主动轮机构上,进给带与主动轮机构和被动轮机构传动连接,本发
一种两自由度虚拟手术的力反馈装置.pdf
一种两自由度虚拟手术的力反馈装置,其包括:机械子系统和电气子系统;所述机械子系统包括机械装置主轴、第一主轴固定座、第二主轴固定座、主轴滑块、导向杆、钢丝绳、第一线轮组、第一驱动执行元件、第二线轮组、第二驱动执行元件;所述机械装置主轴前部连接外部手术器械,中部由主轴滑块带动钢丝绳与第一线轮组、第一驱动执行元件相连,第二主轴固定座处设有第一信号采集元件,用来执行手术主轴伸缩运动,采集伸缩运动位置数据并执行力反馈过程;机械装置主轴前部有第一主轴固定座,第一固定座中部开孔处设有第二线轮组、第二驱动执行元件,第二主
一种两自由度的微创手术持镜机构.pdf
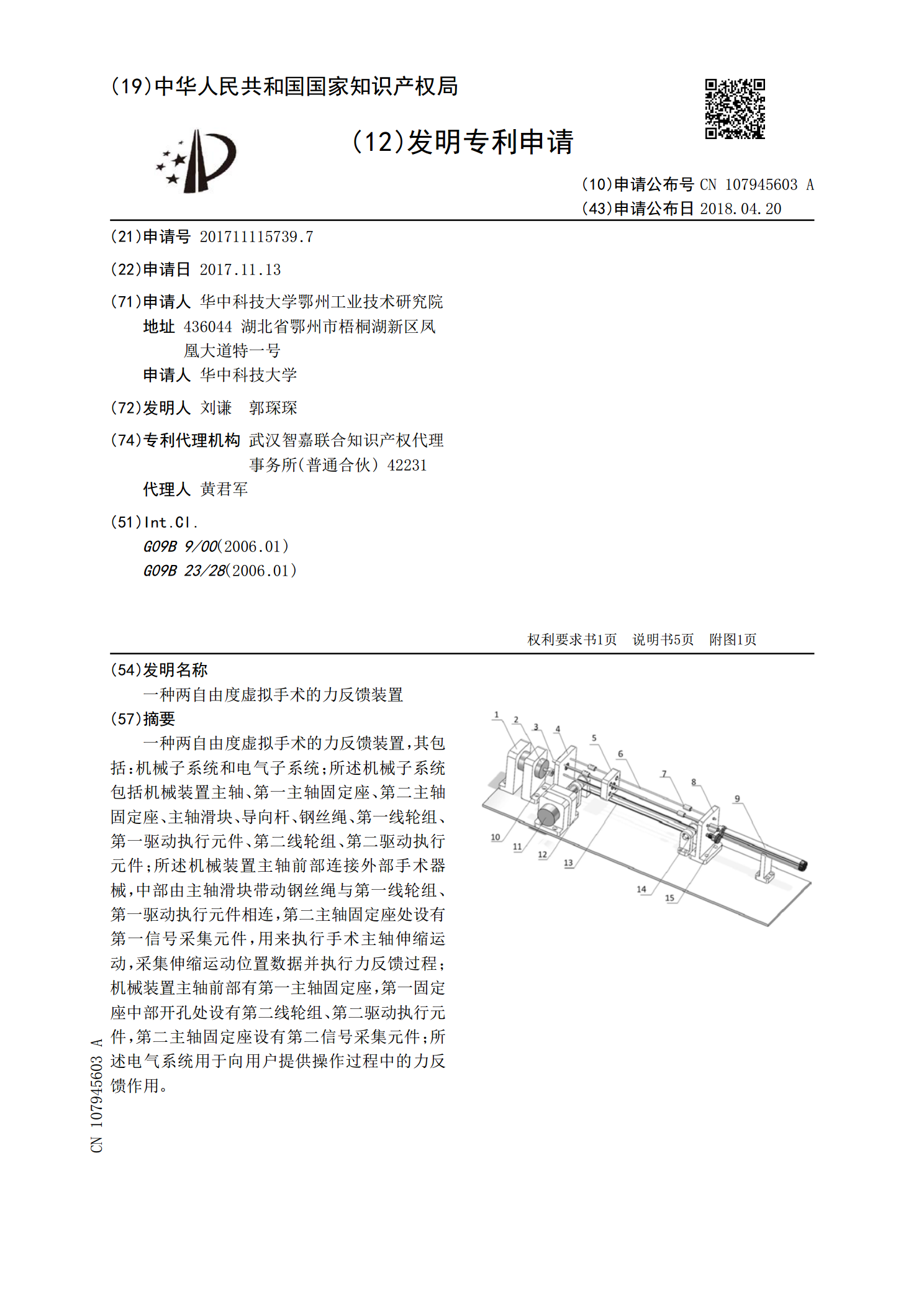
本发明公开了一种两自由度的微创手术持镜机构,包括外壳、盖板、旋转机构、轴向运动机构。本发明采用可弯曲的叠链机构,设计了一种两自由度的微创手术持镜机构,驱动叠链机构弯曲与旋转,实现末端内窥镜的360°成像,从而为微创手术无死角的稳定视野。本发明提供一种采用齿轮啮合旋转运动、结合螺旋轴向传动运动方案,在极小的空间紧凑布局,以满足微创手术作业的小型化、高平稳、高精度的作业需求。

一种6自由度力反馈虚拟手术器械.pdf
本发明涉及一种6自由度力反馈虚拟手术器械,包括机械机构和控制模块,其中机械机构包括底座、回转支撑轴承、两个底板、两个支撑板、三个支承座、主轴、两个减速轮、四组拉杆、滚动轴承、两个关节连接件、齿轮组、剪刀手柄、四组执行元件,六组传感检测元件;控制模块包括角度信号采集模块、主控芯片模块、执行元件驱动模块和SCI通讯模块。本发明为实现虚拟手术中的力觉模拟,设计了力反馈器机械臂,具有多自由度、大位移空间、定位精确以及反应灵敏等优点,为虚拟手术人机交互提供了一个很好的硬件和软件平台;本发明的控制模块能够很好地实现力

胃肠腔镜手术指引.ppt
胃肠腔镜手术指引腹腔镜下胃ca根治5板1#丝线1板4#丝线2板7#丝线体位:人字位。主刀站病人左侧(屏幕摆右上)一助站右侧屏幕摆左上。开放后位置互换。备荷包钳、闭合钳(3钉)、可可钳腹腔镜下直肠(乙状结肠)ca根治(保肛)1、4#丝线各一7#丝线2板体位:人字位。主刀屏幕摆脚下。一助屏幕摆病人右上方处。备荷包钳、可可钳腹腔镜下直肠ca根治(挖肛)体位,一只脚架起。屏幕摆脚上;主刀站病人右侧。丝线各两包。不需要荷包钳,闭合钳。备可可腹腔镜下右半结肠ca根治体位:平卧位。主刀站病人左侧,镜子放于右上方。泌外手