
清洁机器人的清洁方法、装置及机器人.pdf

一吃****永贺

1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
清洁机器人的清洁方法、装置及机器人.pdf
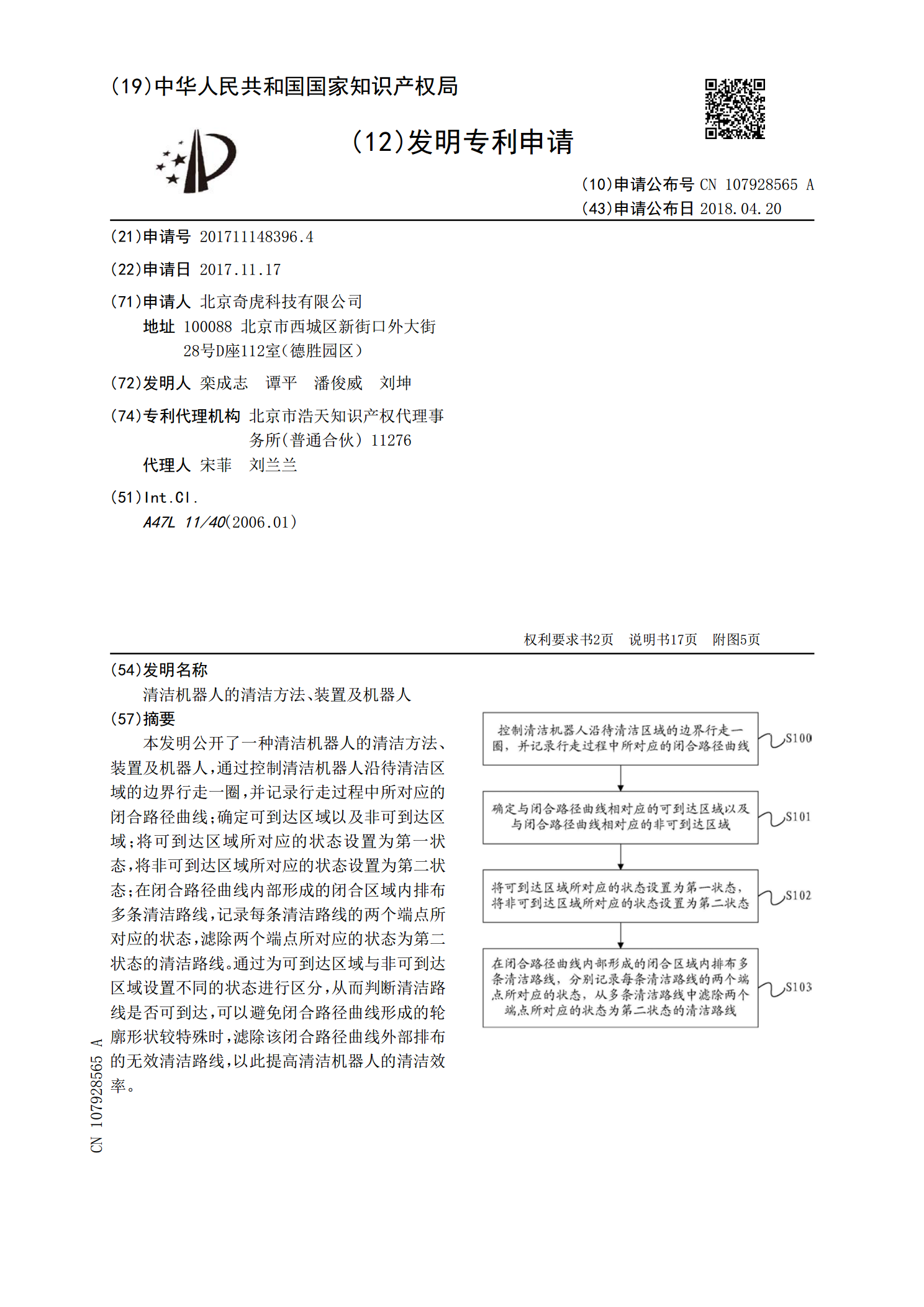
本发明公开了一种清洁机器人的清洁方法、装置及机器人,通过控制清洁机器人沿待清洁区域的边界行走一圈,并记录行走过程中所对应的闭合路径曲线;确定可到达区域以及非可到达区域;将可到达区域所对应的状态设置为第一状态,将非可到达区域所对应的状态设置为第二状态;在闭合路径曲线内部形成的闭合区域内排布多条清洁路线,记录每条清洁路线的两个端点所对应的状态,滤除两个端点所对应的状态为第二状态的清洁路线。通过为可到达区域与非可到达区域设置不同的状态进行区分,从而判断清洁路线是否可到达,可以避免闭合路径曲线形成的轮廓形状较特殊

清洁机器人的地毯探测方法、装置、清洁机器人及介质.pdf
本发明涉及机器人技术领域,公开了一种清洁机器人的地毯探测方法、装置、清洁机器人以及计算机存储介质。该清洁机器人的地毯探测方法应用于清洁机器人,该方法在通过地毯传感器检测到地毯时,确定目标运动参数;根据所述目标运动参数对所述地毯执行探测行为,所述探测行为包括后退、旋转,然后按照弧线前进,所述弧线的方向与所述旋转的方向相反。本发明可以基于该探测行为到的地毯信息进行首次记录或者更新该地毯的相关信息,进而,清洁机器人后续即可基于该准确的地毯信息在地毯场景下针对地面进行清洁操作,有效地避免了对地毯造成污染,提高了清

清洁机器人清洁策略生成方法与装置.pdf
本申请涉及一种清洁机器人清洁策略生成方法、装置、计算机设备和存储介质,其中,方法包括:获取无痕清洁模式对应的无痕清洁地图;根据无痕清洁地图,识别各清洁单元的联通情况;基于各清洁单元的联通情况,确定各清洁单元对应的清洁单元类型;根据各清洁单元对应的清洁单元类型以及预设清洁单元类型优先级规则,确定各清洁单元的清洁优先级,预设清洁单元类型优先级规则基于避免二次污染为目的设定;根据各清洁单元的清洁优先级,生成清洁策略。整个过程中,基于各清洁单元的联通情况,确定各清洁单元对应的清洁单元类型,并且以避免二次污染为目的
行走装置、清洁机器人及清洁机器人的行走方法.pdf
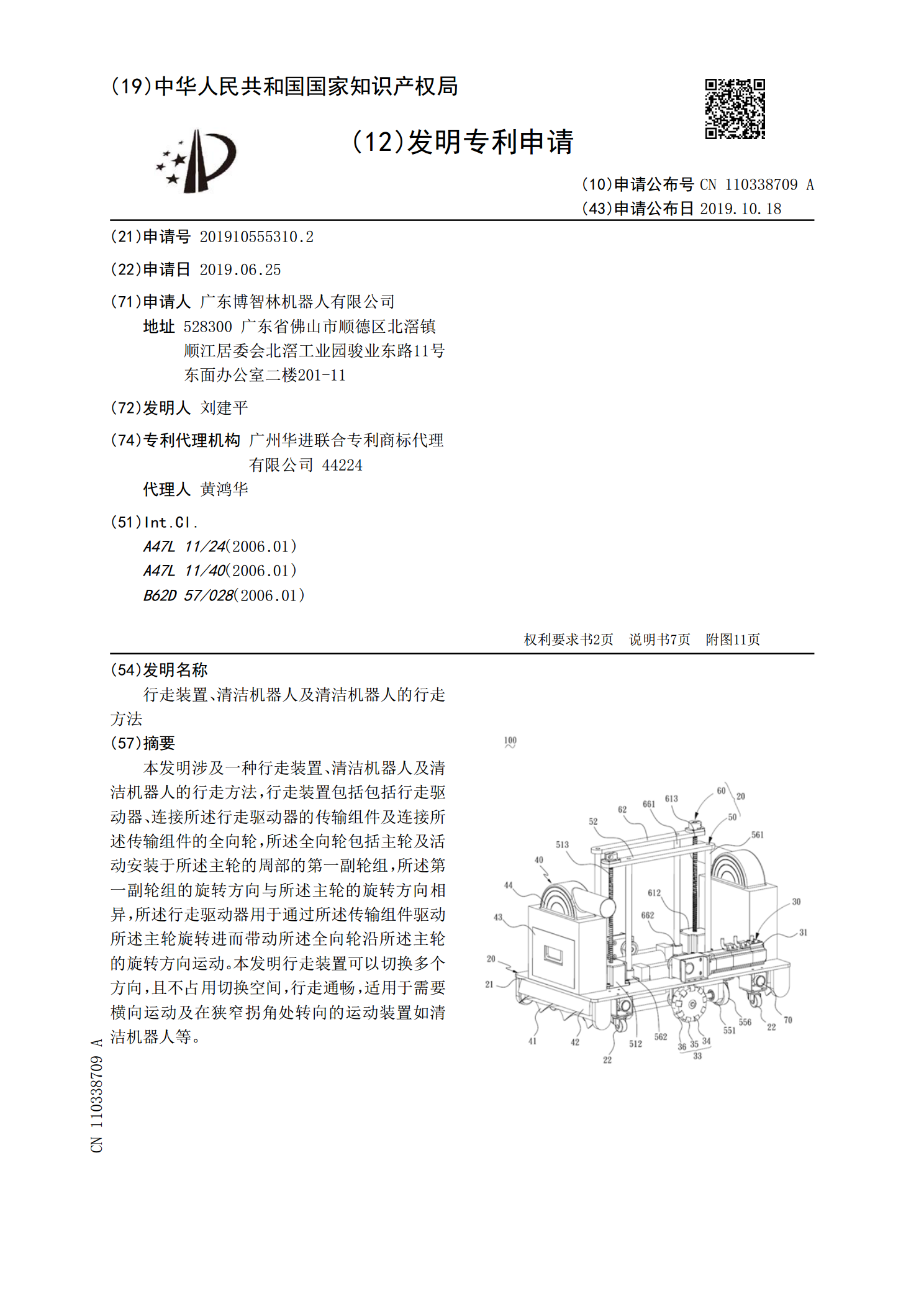
本发明涉及一种行走装置、清洁机器人及清洁机器人的行走方法,行走装置包括包括行走驱动器、连接所述行走驱动器的传输组件及连接所述传输组件的全向轮,所述全向轮包括主轮及活动安装于所述主轮的周部的第一副轮组,所述第一副轮组的旋转方向与所述主轮的旋转方向相异,所述行走驱动器用于通过所述传输组件驱动所述主轮旋转进而带动所述全向轮沿所述主轮的旋转方向运动。本发明行走装置可以切换多个方向,且不占用切换空间,行走通畅,适用于需要横向运动及在狭窄拐角处转向的运动装置如清洁机器人等。

清洁装置、清洁机器人及清洁装置的控制方法.pdf
本发明提供了一种清洁装置、清洁机器人及清洁装置的控制方法。清洁装置包括机体;信息采集部,信息采集部与机体连接,信息采集部用于获取待清洁位置处的清洁信息;清洁部,清洁部与机体连接;控制器,控制器与信息采集部和清洁部电性连接,控制器包括接收器和处理器,接收器用于接收清洁信息,处理器基于清洁信息生成控制信息,清洁部基于控制信息执行对应的预设动作;其中,清洁信息包括残留污渍信息,处理器基于残留污渍信息生成控制信息,以控制机体返回残留有污渍的清洁位置处进行再次清洁作业。采用本申请的技术方案,有效地解决了现有技术中清