
一种双挂汽车列车防折叠实时监测及主动干预系统.pdf

曦晨****22

1/8

2/8

3/8
4/8
5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种双挂汽车列车防折叠实时监测及主动干预系统.pdf
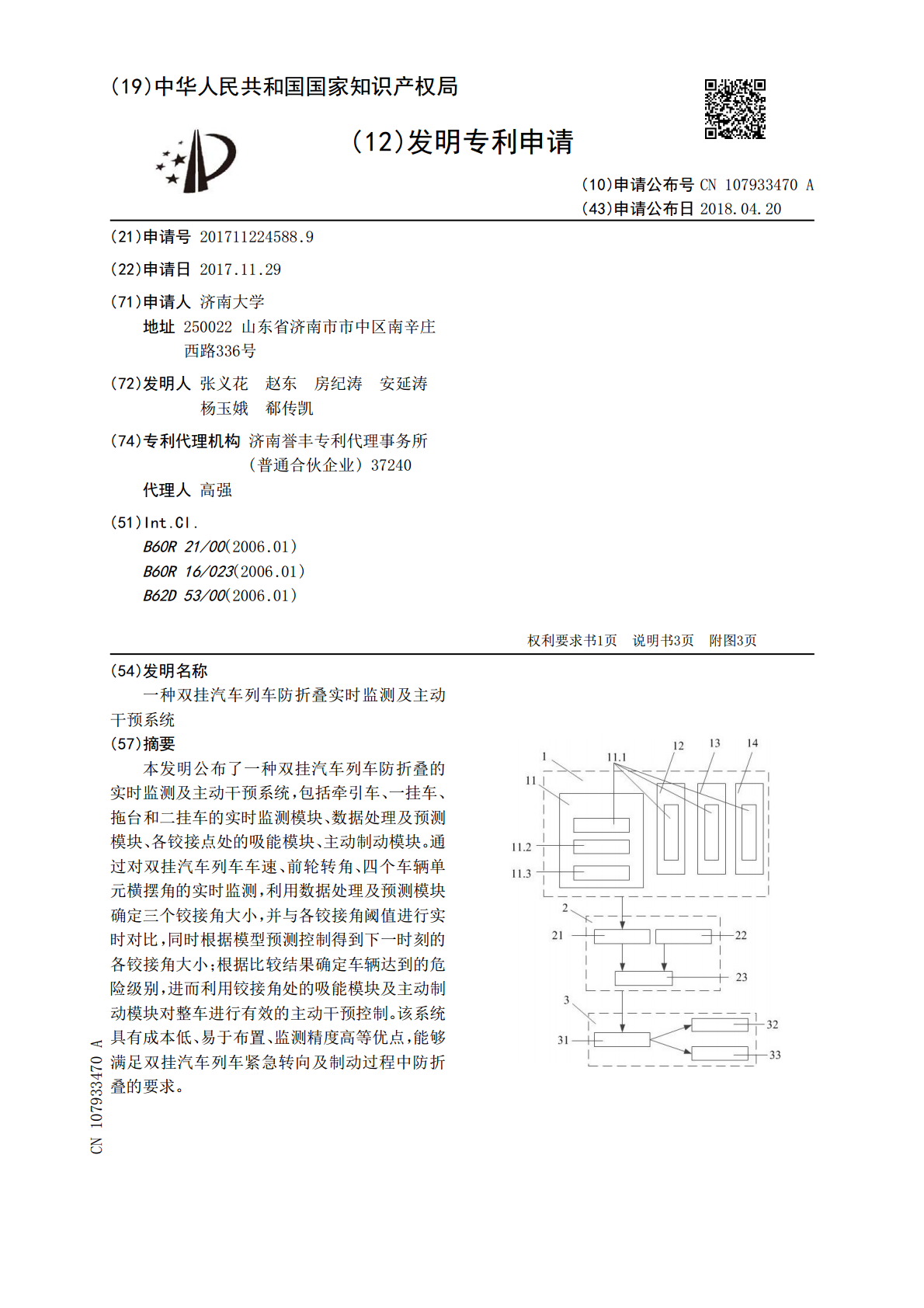
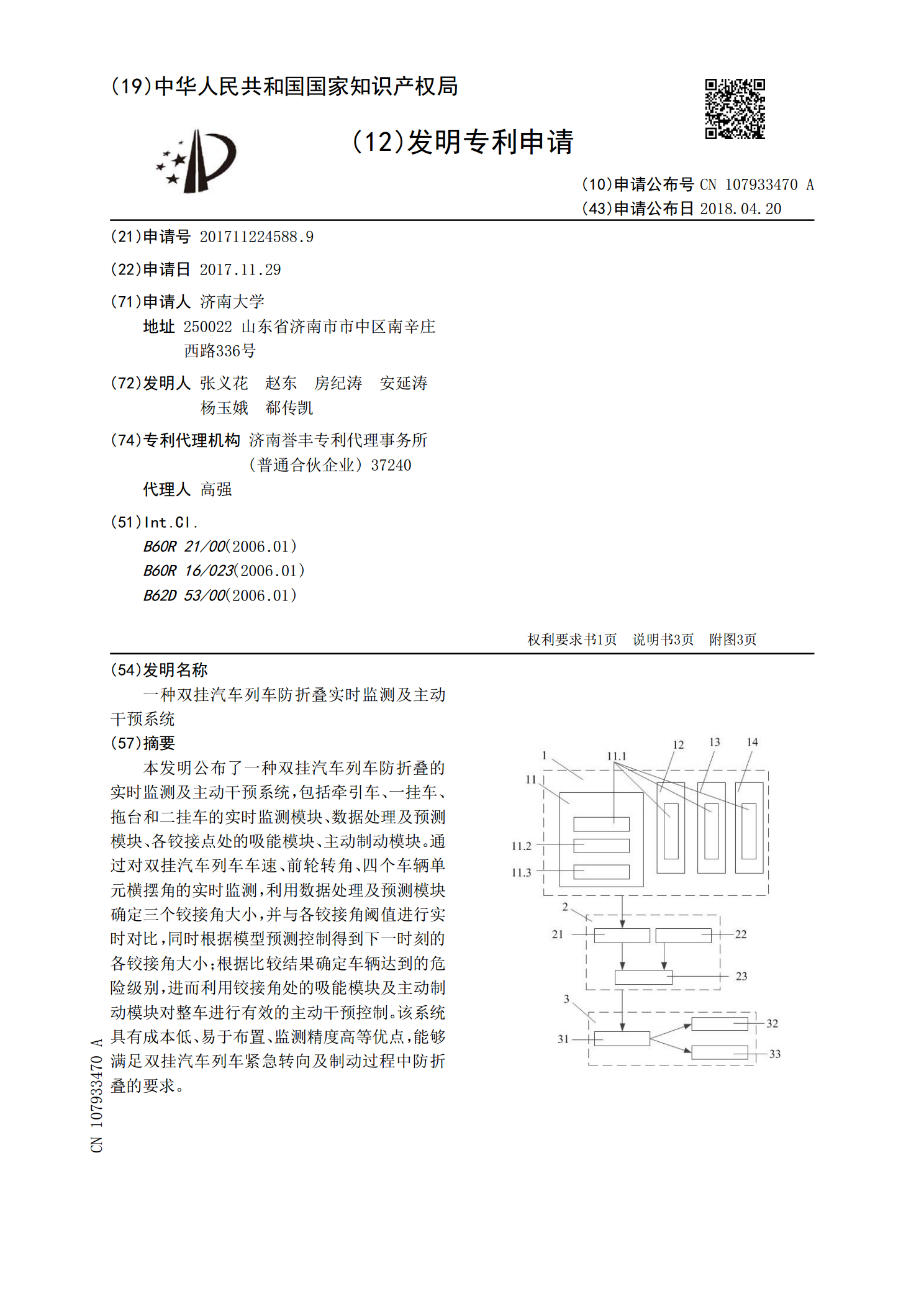
本发明公布了一种双挂汽车列车防折叠的实时监测及主动干预系统,包括牵引车、一挂车、拖台和二挂车的实时监测模块、数据处理及预测模块、各铰接点处的吸能模块、主动制动模块。通过对双挂汽车列车车速、前轮转角、四个车辆单元横摆角的实时监测,利用数据处理及预测模块确定三个铰接角大小,并与各铰接角阈值进行实时对比,同时根据模型预测控制得到下一时刻的各铰接角大小;根据比较结果确定车辆达到的危险级别,进而利用铰接角处的吸能模块及主动制动模块对整车进行有效的主动干预控制。该系统具有成本低、易于布置、监测精度高等优点,能够满足双

半挂汽车列车自动防折叠装置.pdf
本发明公开了一种半挂汽车列车自动防折叠装置,该装置包括凸轮鼓式制动器(11)、曲柄连杆机构和控制系统,当车速、方向盘转角、第五轮转角以及制动踏板位置这四个条件同时满足相应的条件后,控制系统才向制动电磁阀(K1)发出制动指令,利用凸轮鼓式制动器11、曲柄连杆机构对牵引车(4)和半挂车(5)之间的相对转动进行约束,防止制动时折叠的发生;该装置可调节组合连杆(22)长度,以适配不同类型的牵引车或安装位置,且便于维修和更换。该装置可以应用于各种半挂汽车列车上,用于防止在高速行进中因刹车减速或紧急制动而由惯性造成的

双杆式全挂汽车列车的主动转向控制研究的开题报告.docx
双杆式全挂汽车列车的主动转向控制研究的开题报告一、研究背景现代铁路运输作为一种高效、安全、稳定的交通方式,已经成为人们出行和物资运输的首选。在铁路运输中,汽车列车也是占有重要地位的一种车辆形式。汽车列车以其灵活性、经济性和适应性等诸多优点,已经广泛应用于铁路货运和客运中。汽车列车的构成方式分为两种,即单杆式挂车列车和双杆式全挂汽车列车。然而,在实际运用中,双杆式挂车列车存在着一些问题,如车辆不稳定、弯道行驶容易脱轨、无法做到灵活转向等问题,这些问题为其运营带来了很大的困难。因此,如何对双杆式全挂汽车列车进

双杆式全挂汽车列车的主动转向控制研究的任务书.docx
双杆式全挂汽车列车的主动转向控制研究的任务书任务书课题名称:双杆式全挂汽车列车的主动转向控制研究研究内容及任务:双杆式全挂汽车列车在高速行驶时,容易出现转向失控现象,影响行车安全和稳定性。本课题旨在通过研究双杆式全挂汽车列车的动力学特性和转向机构结构,探索主动转向控制技术,改善汽车列车的操控性和稳定性。1.研究双杆式全挂汽车列车的动力学特性任务:通过对汽车列车的车辆动力学建模,分析汽车列车行驶时的各种力和热力学参数,探究汽车列车转向时的机理和原因,为后续控制措施的制定提供基础理论。2.分析双杆式全挂汽车列

一种基于实时睡眠监测的中药干预系统.pdf
本发明涉及一种基于实时睡眠监测的中药干预系统,其特征在于:所述中药干预系统包括实时睡眠监测系统、中药干预智能设备、云服务器和移动终端,所述实时睡眠监测系统包括生理信息采集模块、校准放大电路、处理器单元、驱动器单元和无线通讯单元,所述生理信息采集模块、校准放大电路、处理器单元依次连接,所述处理器单元与无线通讯单元电性连接,所述移动终端通过网络与实时睡眠监测系统中的无线通讯单元连接。本发明实现了睡眠监测系统向云服务器持续发送睡眠数据;云服务器根据计算结果自动判断该向中药干预智能设备发送释放药物的指令;中药干预