
一种用于微创外科机器人用多自由度持针器.pdf

运升****魔王

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于微创外科机器人用多自由度持针器.pdf
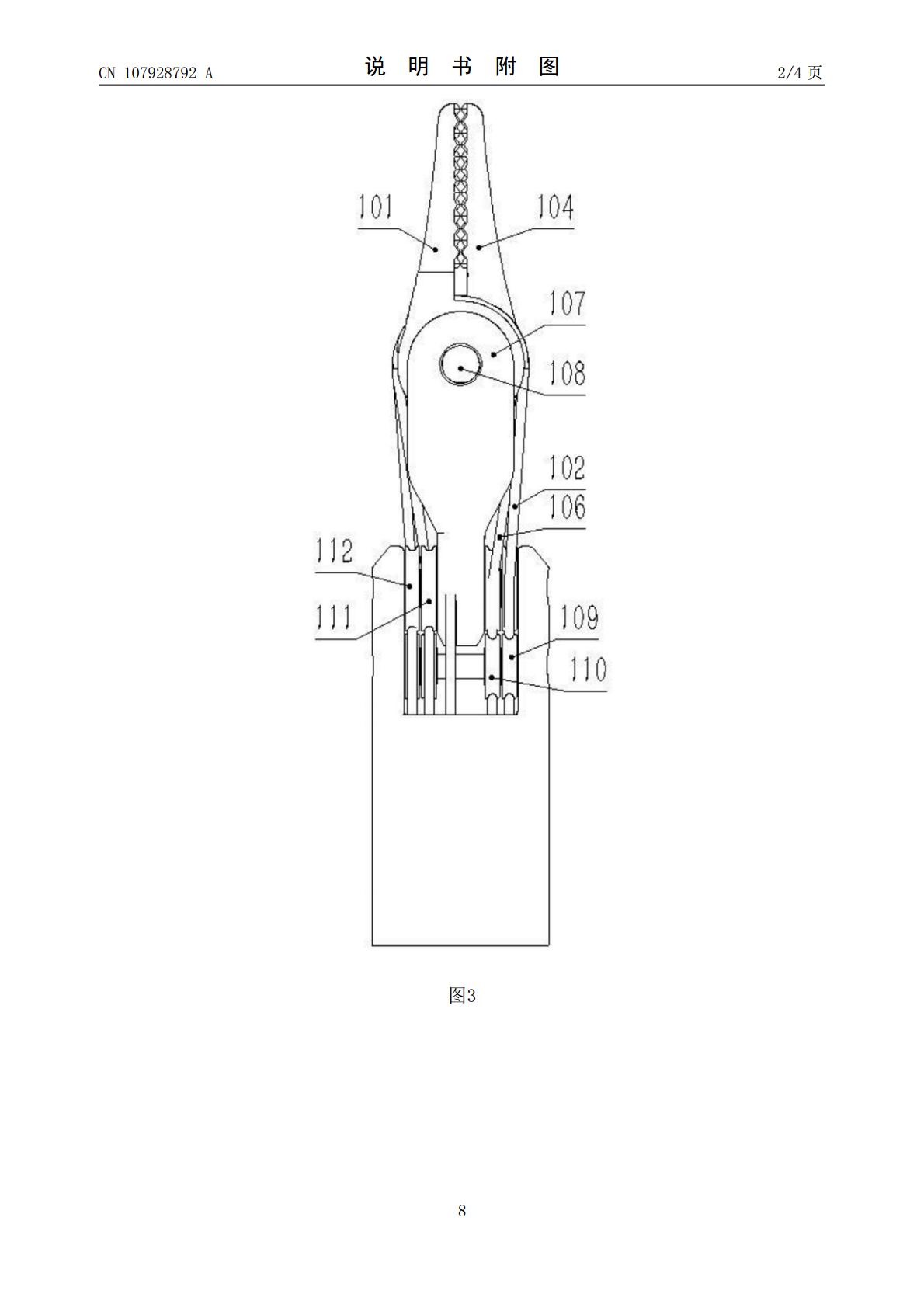
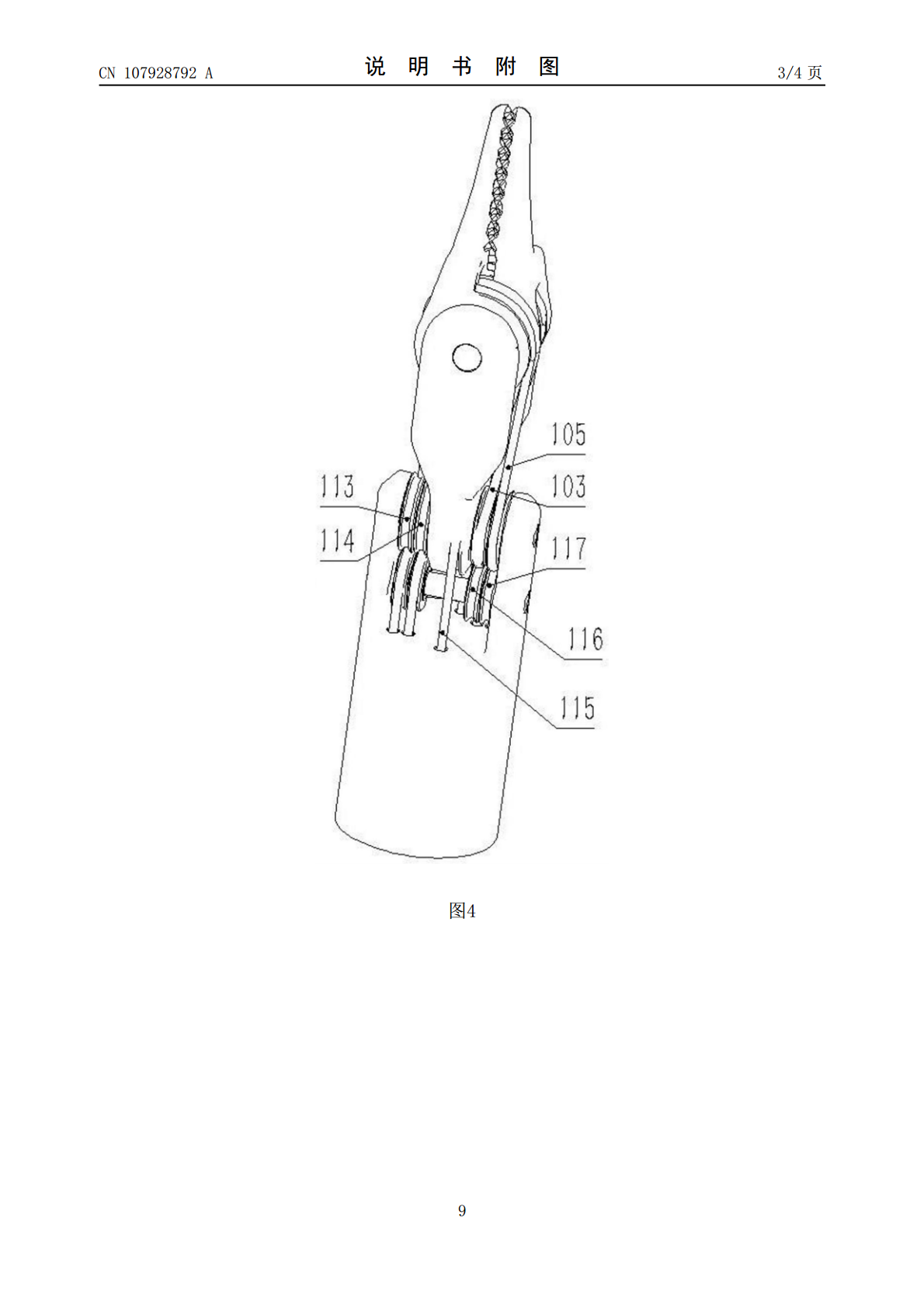
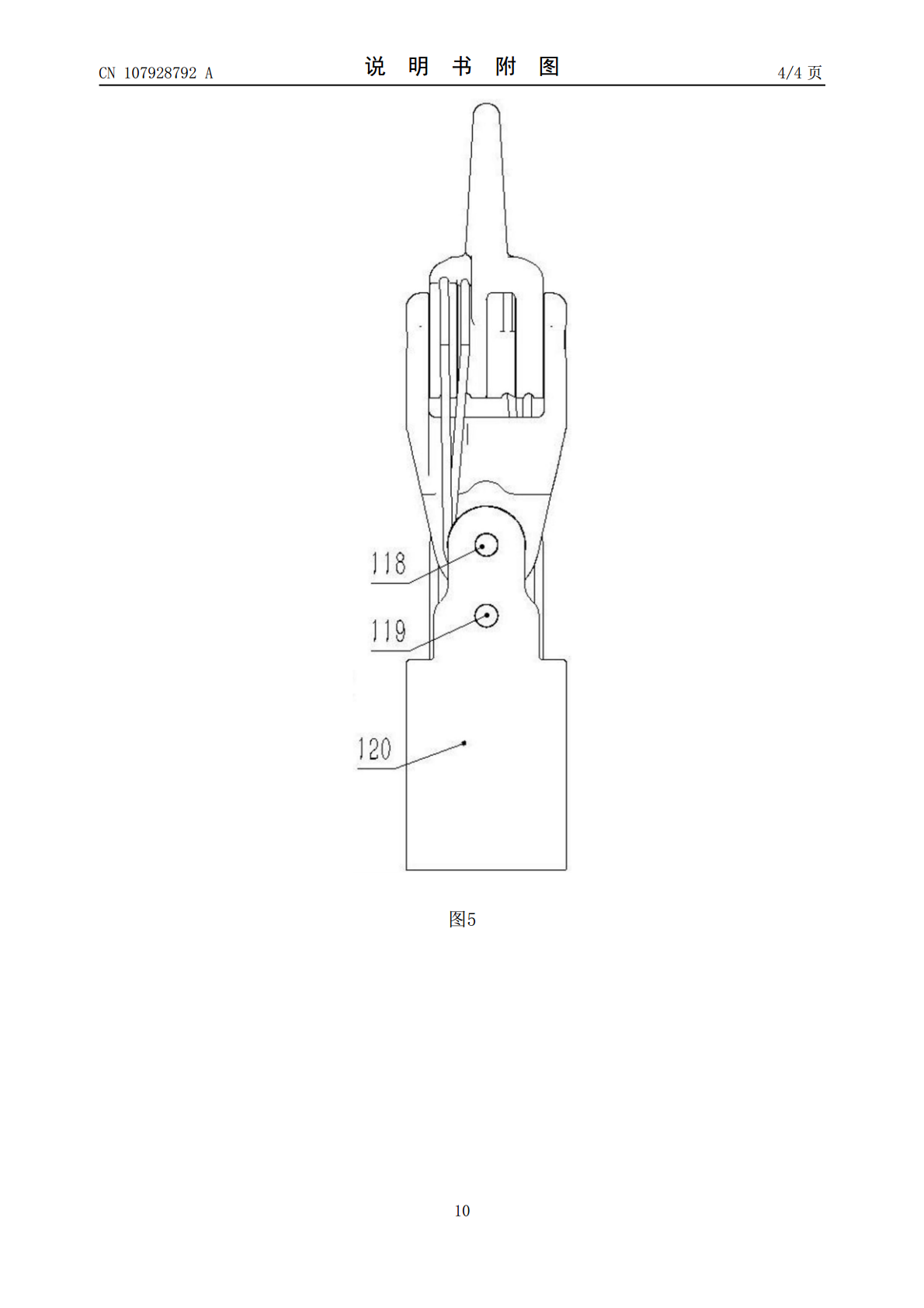
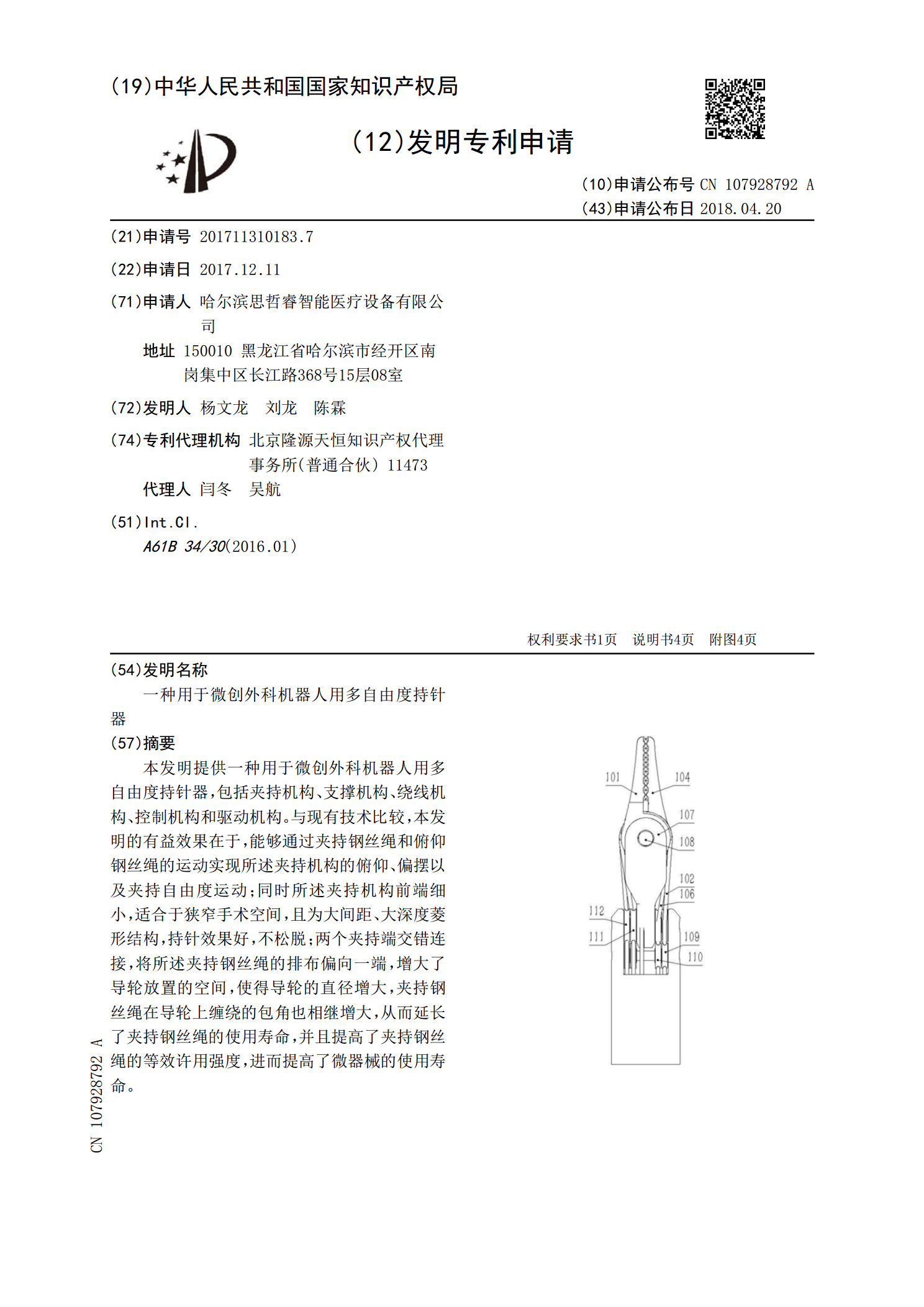
本发明提供一种用于微创外科机器人用多自由度持针器,包括夹持机构、支撑机构、绕线机构、控制机构和驱动机构。与现有技术比较,本发明的有益效果在于,能够通过夹持钢丝绳和俯仰钢丝绳的运动实现所述夹持机构的俯仰、偏摆以及夹持自由度运动;同时所述夹持机构前端细小,适合于狭窄手术空间,且为大间距、大深度菱形结构,持针效果好,不松脱;两个夹持端交错连接,将所述夹持钢丝绳的排布偏向一端,增大了导轮放置的空间,使得导轮的直径增大,夹持钢丝绳在导轮上缠绕的包角也相继增大,从而延长了夹持钢丝绳的使用寿命,并且提高了夹持钢丝绳的等

一种微创手术机器人用缝合针持针器.pdf
本发明涉及一种微创手术机器人用缝合针持针器,包括缝合针以及与缝合针相适配的持针器,缝合针包括针尖、针尾、持针部和针体,针体呈圆弧形结构,针体一端为针尖,另一端为针尾,且靠近针尾位置设计有持针部;持针器包括底座、驱动盘A、驱动盘B、支撑杆和钳头,支撑杆一端安装有钳头,另一端安装在底座上,底座上安装有驱动盘A和驱动盘B,驱动盘A、驱动盘B分别通过转动来控制钳头的钳A、钳B的转动,钳A与钳B合并时,其上的槽口A与槽口B对齐,且槽口A、槽口B的平面与持针部的平面紧贴以稳定夹持缝合针;本发明能够防止缝合针和持针器之

一种微创持针器.pdf
本发明公开了一种微创持针器,包含外壳,定钳和一自锁组件;定钳与外壳外部的远端连接;外壳的远端设有一缺口;自锁组件包含依次连接的动钳、连接部、连杆、推柄;动钳与定钳啮合以夹紧缝针;连接部设在所述缺口处,设有第一销轴、第二销轴,分别用于动钳与外壳的铰接和动钳与连杆铰接;连杆在推柄的带动下,通过位移,带动连接部以第一销轴为中心旋转,从而分开动钳与定钳;连杆设在外壳内;连杆的外表面缠绕设置一弹簧;弹簧两端分别连接第一定位部与第二定位部,第一定位部设在外壳内壁上,第二定位部设在连杆或推柄上。本发明利用弹簧的设计保持
一种用于微创手术的多自由度手术执行器.pdf
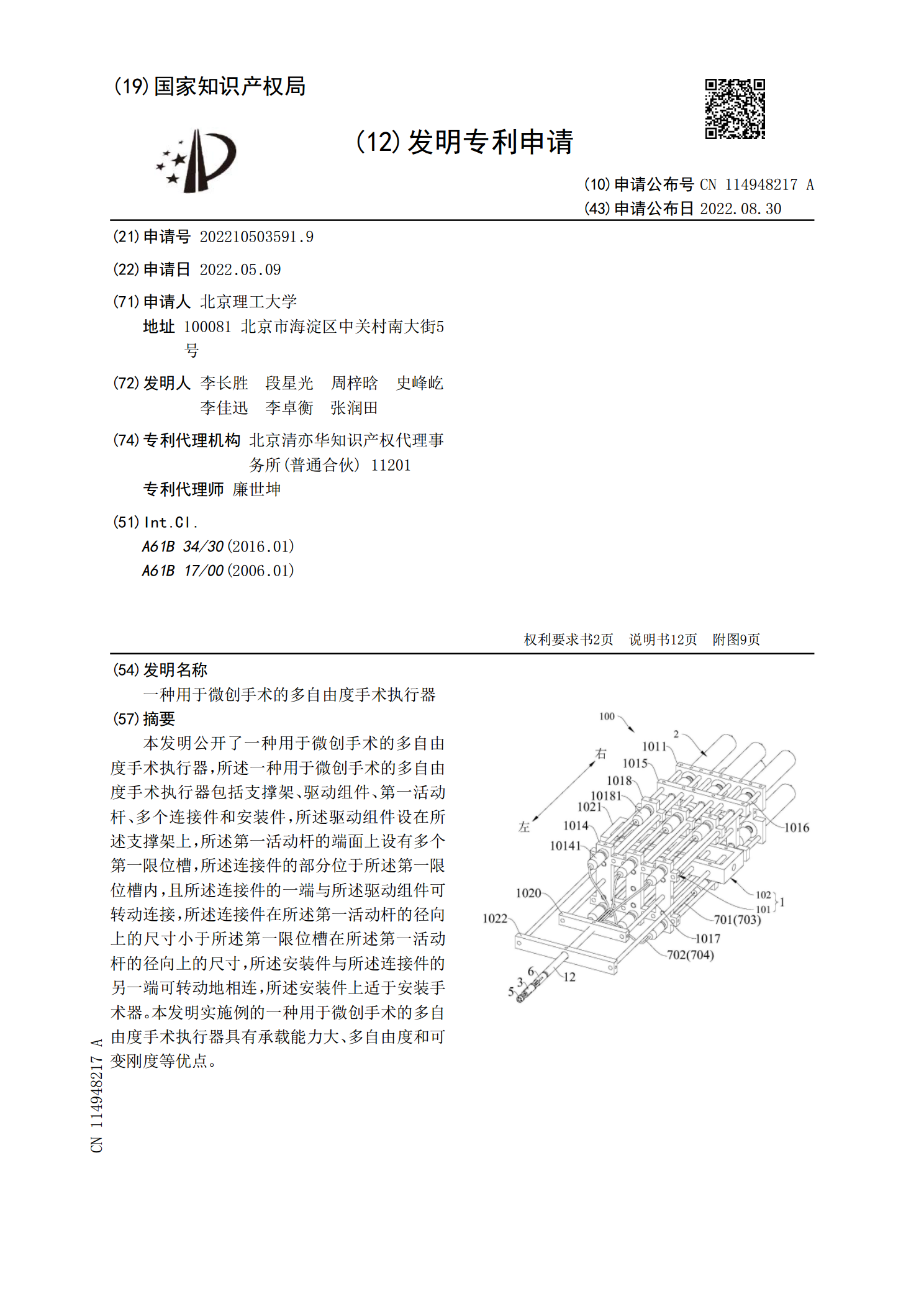
本发明公开了一种用于微创手术的多自由度手术执行器,所述一种用于微创手术的多自由度手术执行器包括支撑架、驱动组件、第一活动杆、多个连接件和安装件,所述驱动组件设在所述支撑架上,所述第一活动杆的端面上设有多个第一限位槽,所述连接件的部分位于所述第一限位槽内,且所述连接件的一端与所述驱动组件可转动连接,所述连接件在所述第一活动杆的径向上的尺寸小于所述第一限位槽在所述第一活动杆的径向上的尺寸,所述安装件与所述连接件的另一端可转动地相连,所述安装件上适于安装手术器。本发明实施例的一种用于微创手术的多自由度手术执行器

一种用于显微持针器的消毒盒.pdf
一种用于显微持针器的消毒盒,包括上盖、下盖和消毒垫,消毒垫放置于下盖中;所述消毒垫上设有多个辅助开合机构,所述辅助开合机构包括固定扣、固定圈、弹性拉杆和拉动球;所述固定扣可将显微持针器的开合处固定在消毒垫上;固定扣的左下方设有固定圈,固定圈上连接有弹性拉杆,弹性拉杆的另一端设有挂钩,固定扣的右下方设有接受水流冲击的拉动球,拉动球上设有连接杆,连接杆的端点设有挂钩。本发明用于显微持针器的全自动清洗及消毒盒,可使显微持针器在清洗及消毒的过程中不断开合,可保证显微持针器的清洗及消毒彻底,不留死角。