
一种智能车辆路径跟踪前轮转角补偿控制方法.pdf

一吃****书竹


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能车辆路径跟踪前轮转角补偿控制方法.pdf
本发明涉及一种智能车辆路径跟踪前轮转角补偿控制方法。包含以下步骤:步骤1,建立被控车辆模型;步骤2,设计改进PurePursuit路径跟踪控制器;步骤3,前轮转角补偿控制器;步骤4,纵向车速模糊控制器。步骤5,设计车轮转矩PID控制器。其中改进PurePursuit路径跟踪控制器中前视距离通过纵向车速模糊控制器和路径曲率信息在线自适应得到,前轮转角补偿控制器中的相应参数由粒子群算法线下调节得到。本发明提出的基于改进PurePursuit算法的智能车辆路径跟踪前轮转角补偿控制方法相比传统PurePu

基于转角补偿的智能车辆循迹控制系统.docx
基于转角补偿的智能车辆循迹控制系统摘要:智能车辆循迹控制系统是现代汽车控制技术的一个重要分支,其主要目的是提高汽车的行驶稳定性和安全性。本文从转角补偿的角度出发,探讨了智能车辆循迹控制系统的原理和技术实现。我们的研究表明,基于转角补偿的循迹控制系统能够有效减少车辆偏离轨迹的概率,提高车辆行驶的精度和稳定性,并且能够在真实道路环境中进行快速响应和精确控制。关键词:智能车辆;循迹控制;转角补偿;行驶稳定性;安全性。一、引言随着汽车行业的快速发展,智能车辆技术越来越受到广泛的关注。智能车辆循迹控制系统是其中的一
基于反馈纯跟踪的智能车辆路径跟随控制方法.pdf
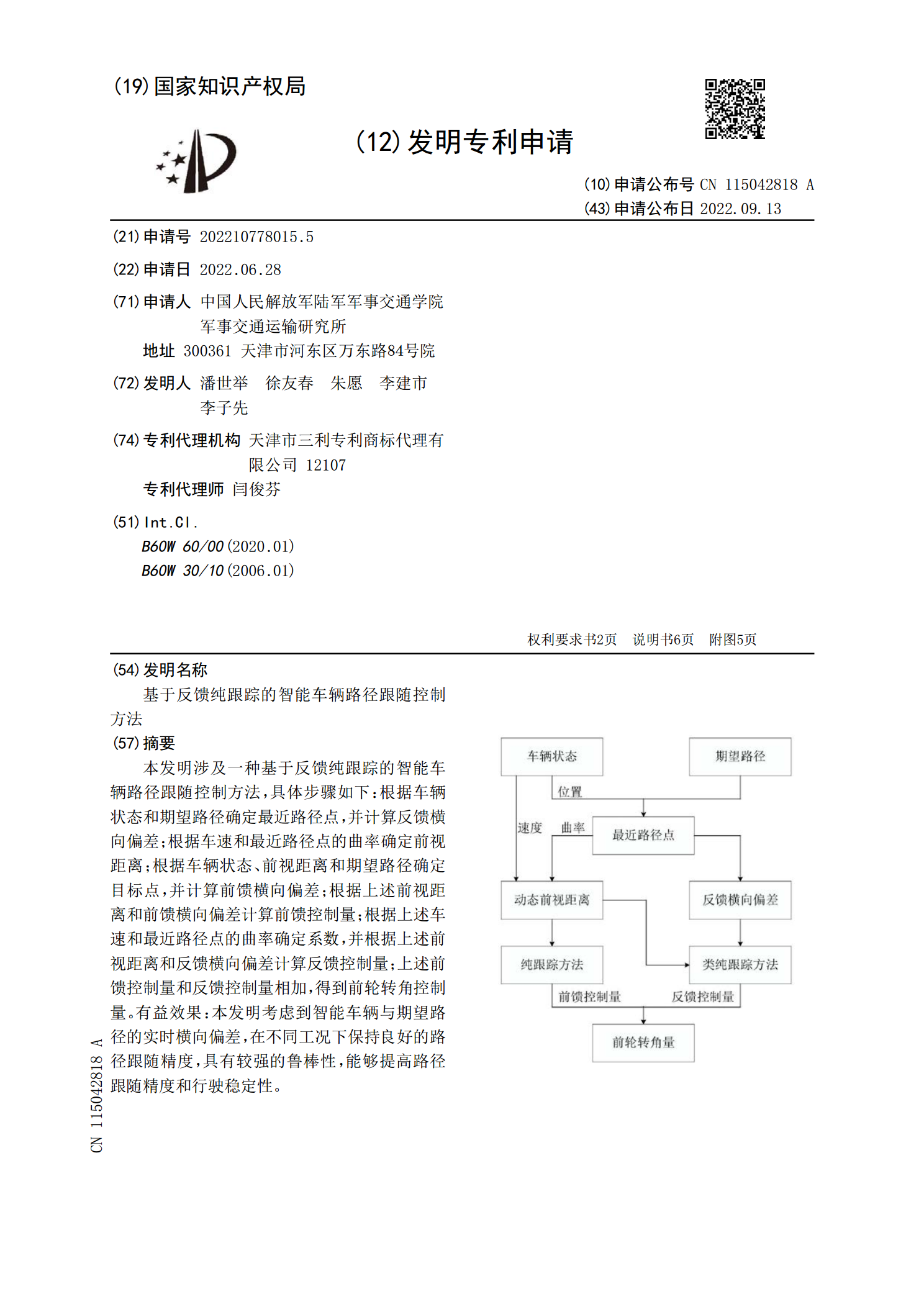
本发明涉及一种基于反馈纯跟踪的智能车辆路径跟随控制方法,具体步骤如下:根据车辆状态和期望路径确定最近路径点,并计算反馈横向偏差;根据车速和最近路径点的曲率确定前视距离;根据车辆状态、前视距离和期望路径确定目标点,并计算前馈横向偏差;根据上述前视距离和前馈横向偏差计算前馈控制量;根据上述车速和最近路径点的曲率确定系数,并根据上述前视距离和反馈横向偏差计算反馈控制量;上述前馈控制量和反馈控制量相加,得到前轮转角控制量。有益效果:本发明考虑到智能车辆与期望路径的实时横向偏差,在不同工况下保持良好的路径跟随精度,

智能车辆路径跟踪的模糊预瞄控制方法研究.docx
智能车辆路径跟踪的模糊预瞄控制方法研究智能车辆路径跟踪的模糊预瞄控制方法研究摘要:随着自动驾驶技术的快速发展,智能车辆的路径跟踪成为自动驾驶系统中的关键技术之一。传统的路径跟踪方法通常采用PID控制器来实现,但是在复杂的道路环境下,该方法往往难以达到精确的路径跟踪效果。为此,本文提出了一种基于模糊预瞄控制的智能车辆路径跟踪方法,以提高路径跟踪的精确性和鲁棒性。1.引言智能车辆的路径跟踪是指车辆在行驶过程中准确地按照预设的路径行驶。路径跟踪技术在自动驾驶系统中具有重要的应用价值,可以提高行驶的安全性和效率。
一种带有PID转角补偿的参数自整定LQR路径跟踪方法.pdf
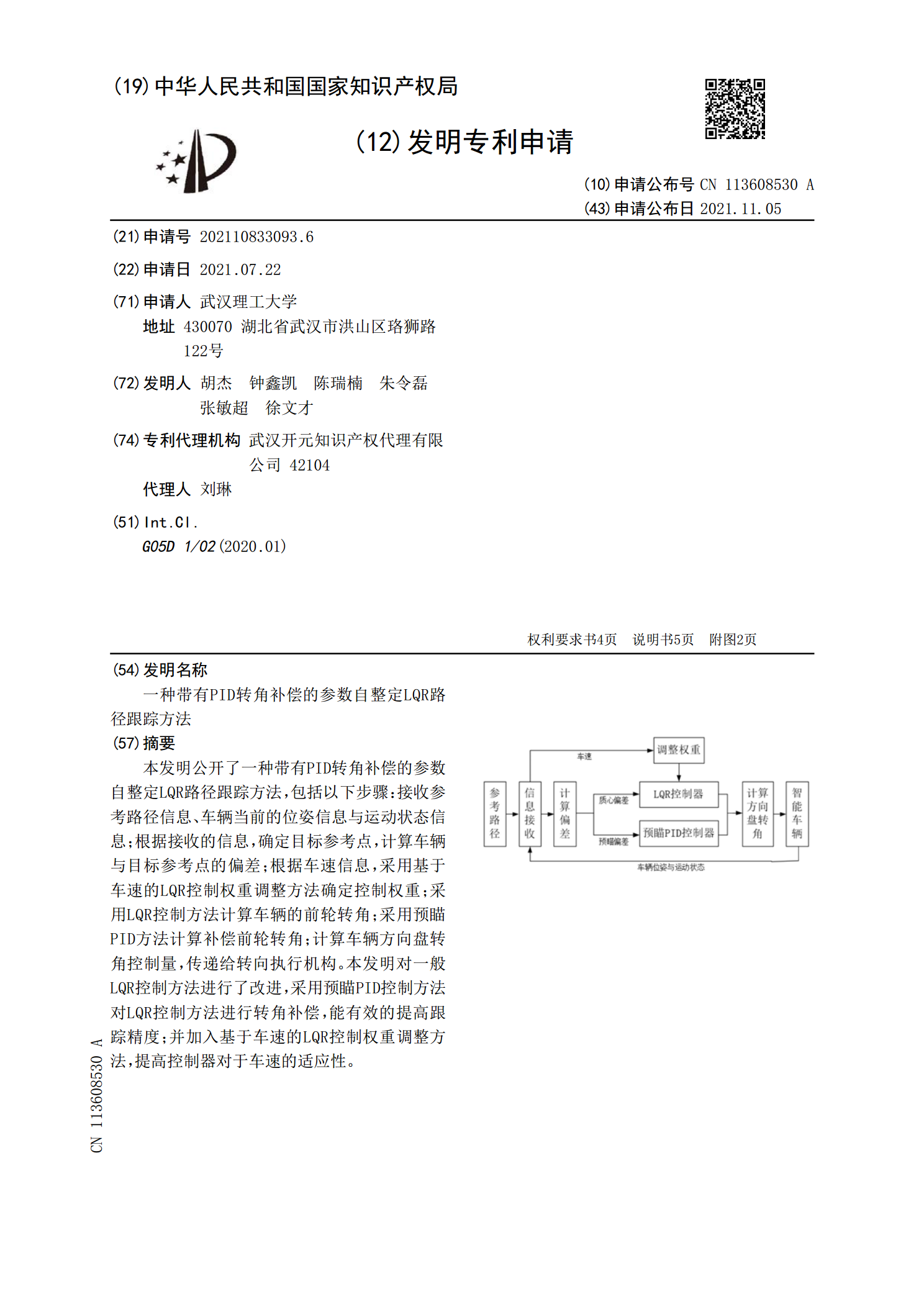
本发明公开了一种带有PID转角补偿的参数自整定LQR路径跟踪方法,包括以下步骤:接收参考路径信息、车辆当前的位姿信息与运动状态信息;根据接收的信息,确定目标参考点,计算车辆与目标参考点的偏差;根据车速信息,采用基于车速的LQR控制权重调整方法确定控制权重;采用LQR控制方法计算车辆的前轮转角;采用预瞄PID方法计算补偿前轮转角;计算车辆方向盘转角控制量,传递给转向执行机构。本发明对一般LQR控制方法进行了改进,采用预瞄PID控制方法对LQR控制方法进行转角补偿,能有效的提高跟踪精度;并加入基于车速的LQR