
一种带有PID转角补偿的参数自整定LQR路径跟踪方法.pdf

Ch****75

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种带有PID转角补偿的参数自整定LQR路径跟踪方法.pdf
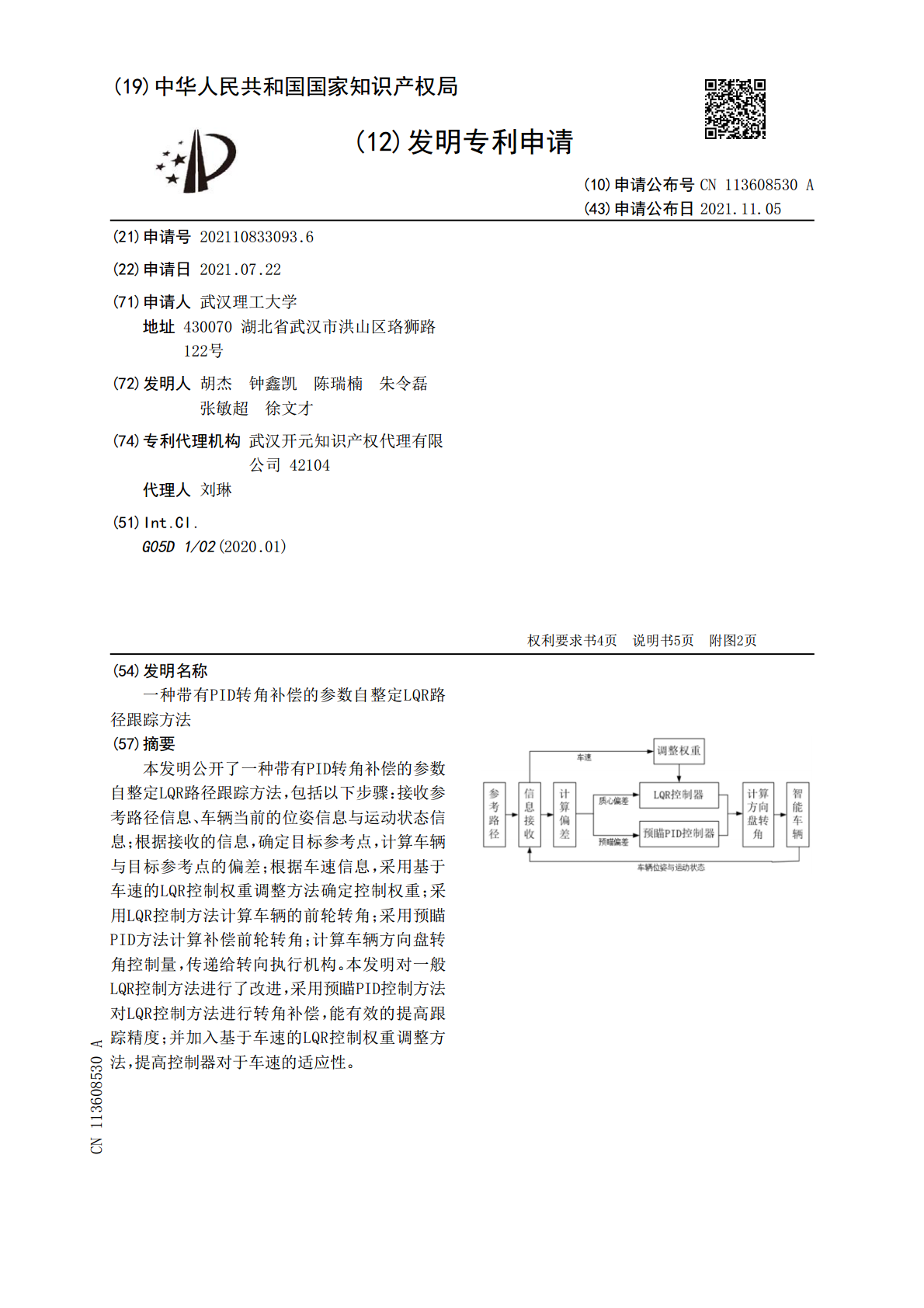
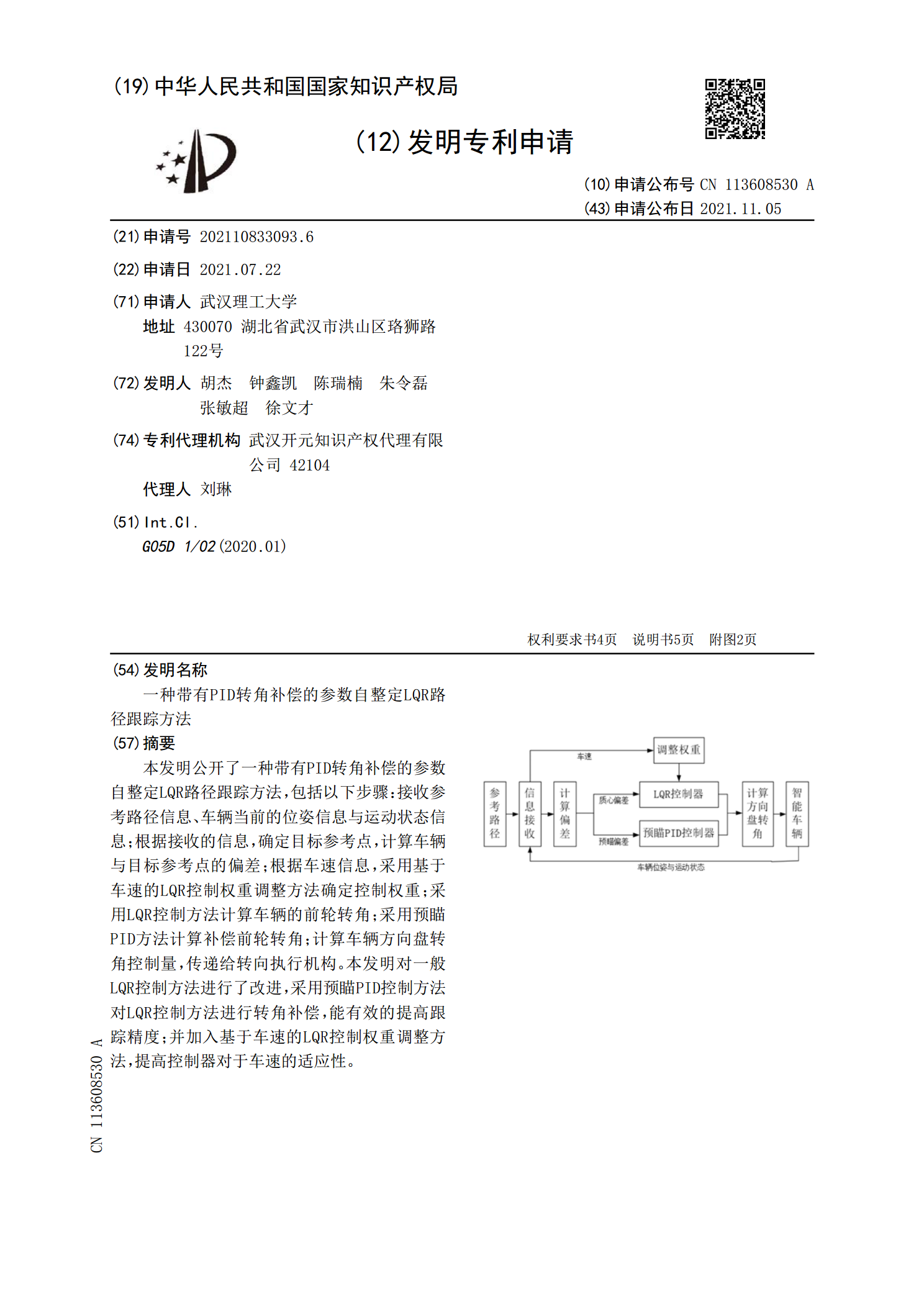
本发明公开了一种带有PID转角补偿的参数自整定LQR路径跟踪方法,包括以下步骤:接收参考路径信息、车辆当前的位姿信息与运动状态信息;根据接收的信息,确定目标参考点,计算车辆与目标参考点的偏差;根据车速信息,采用基于车速的LQR控制权重调整方法确定控制权重;采用LQR控制方法计算车辆的前轮转角;采用预瞄PID方法计算补偿前轮转角;计算车辆方向盘转角控制量,传递给转向执行机构。本发明对一般LQR控制方法进行了改进,采用预瞄PID控制方法对LQR控制方法进行转角补偿,能有效的提高跟踪精度;并加入基于车速的LQR

一种新的PID参数自整定方法.docx
一种新的PID参数自整定方法标题:基于增量模型的自整定PID参数优化方法研究摘要:PID控制器是工业过程控制中最常用的一种控制器,它通过分析误差、误差变化率和误差积分来生成控制信号。但是,在实际应用中,PID控制器的参数调节通常需要根据具体的系统特性进行手动调整,这个过程需要耗费大量的时间和精力。为了简化调参过程,提高系统的控制质量和稳定性,本文提出了一种基于增量模型的自整定PID参数优化方法。1.引言PID控制器是一种宽泛应用在工业控制领域的经典控制算法。其具有结构简单、参数易于调节的优势,但是手动调节

一种参数自整定PID温度控制方法.pdf
本发明公开了一种参数自整定PID温度控制方法,包括如下步骤:对整个系统进行数据初始化设置、检测系统内是否存在系统数据、根据判断情况进行相应的运算;最大加热温度前先进行自整定,并在系统存在历史数据后进入二次整定判断,再计算出二次整定目标温度Tsv2,与当前温度进行比较,若Tsv2大于当前温度,则符合条件,计算出Kv、Kctk、Kapt三个系数,利用自整定后的PID参数进行运算以得出一个控制周期内的PWM占空比;若Tsv2小于当前温度,则不符合则符合二次整定条件,然后利用第一次整定计算出的PID参数进行运算以

一种基于规则的PID参数自整定.docx
一种基于规则的PID参数自整定标题:一种基于规则的PID参数自整定方法摘要:PID(比例积分微分)控制器是一种广泛应用于工业控制系统中的反馈控制器。在实际应用中,如何设置合适的PID参数一直是一个重要的问题。本论文提出一种基于规则的PID参数自整定方法,通过根据系统的特性和规则设定合理的参数范围,并利用规则和经验知识进行调整,以实现PID参数的自整定。1.引言PID控制器是一种经典的反馈控制器,广泛应用于工业、环境等各个领域。PID控制器通过测量被控对象的实际输出与期望输出之间的误差,实时调整输出信号,使

PID参数整定方法.doc
PID参数整定方法PID参数整定方法3PID参数整定方法摘要PID控制器现在仍然是应用最广泛的工业控制器,其关键在于对PID参数的优化整定,而采用常规的手工整定方法已经难以满足要求,目前需要解决对PID参数的高效优化问题。本论文首先介绍了PID控制方法和常规PID参数整定方法,编程实现了数字PID控制器和基于遗传算法的参数自整定程序,然后将遗传算法用于不同的被控对象进行PID参数的整定及优化,为了对比控制效果,应用MATLAB软件进行了仿真验证,并用仿真曲线进行直观的对比。结果表明遗传算法能