
动力辅助装置和具有该动力辅助装置的车辆.pdf

淑然****by

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
动力辅助装置和具有该动力辅助装置的车辆.pdf
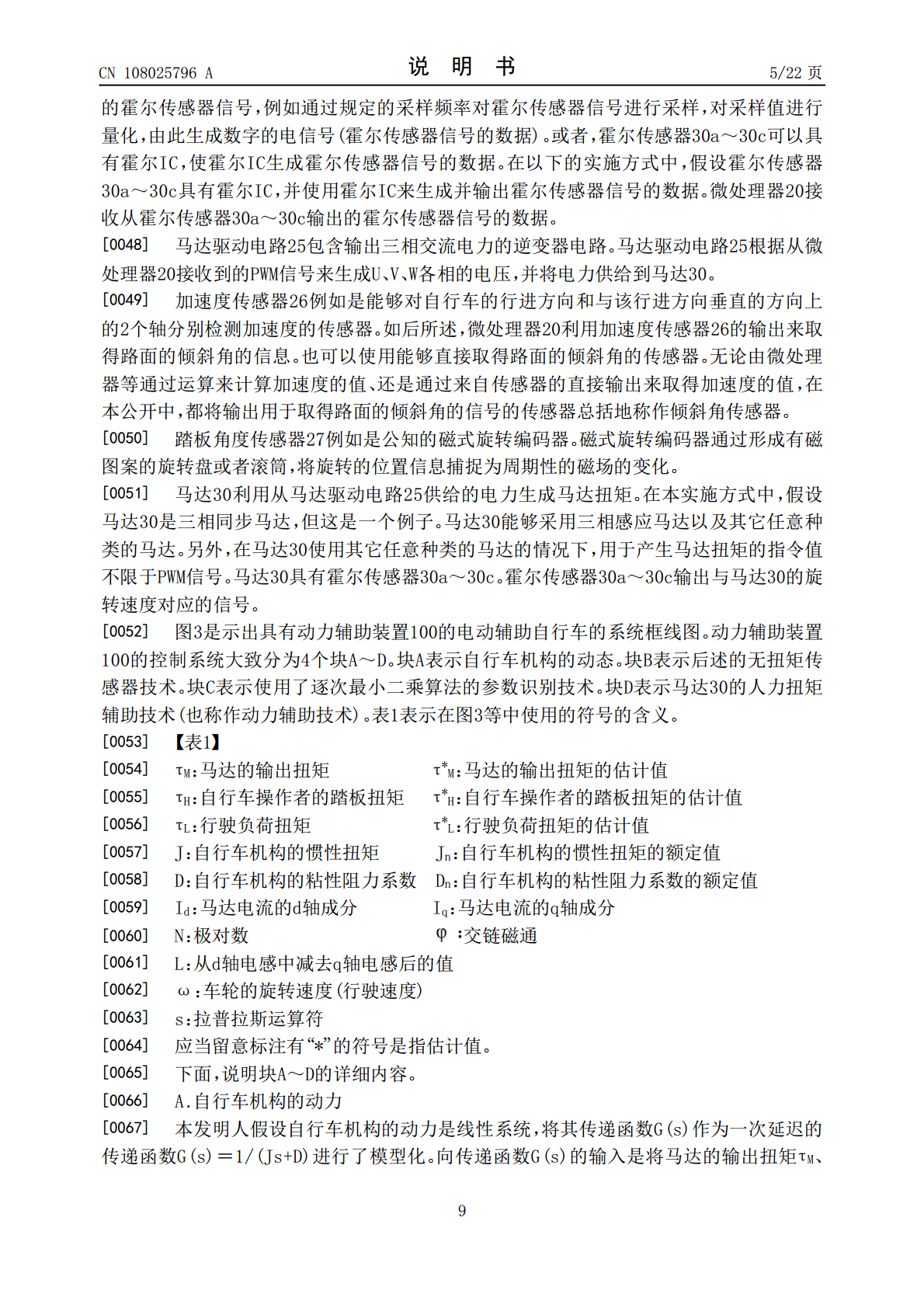
动力辅助装置(100)被用于利用人力进行驱动的车辆(1)的动力辅助。该装置具有马达(30)、马达驱动电路(25)、输出与车轮的旋转速度对应的信号的传感器(30a)~(30c)、存储器(22)和信号处理装置(20)。存储器存储规定将输入到车辆的合计扭矩与车轮的旋转速度关联起来的传递函数和逆传递函数的参数(24b)的信息。信号处理装置根据该逆传递函数,由车轮的旋转速度的检测值决定合计扭矩的估计值。此外,信号处理装置以减小根据该传递函数由例如合计扭矩的估计值确定的车轮的旋转速度的估计值与车轮的旋转速度的检测值之
辅助转运装置及具有该辅助转运装置的运输车.pdf
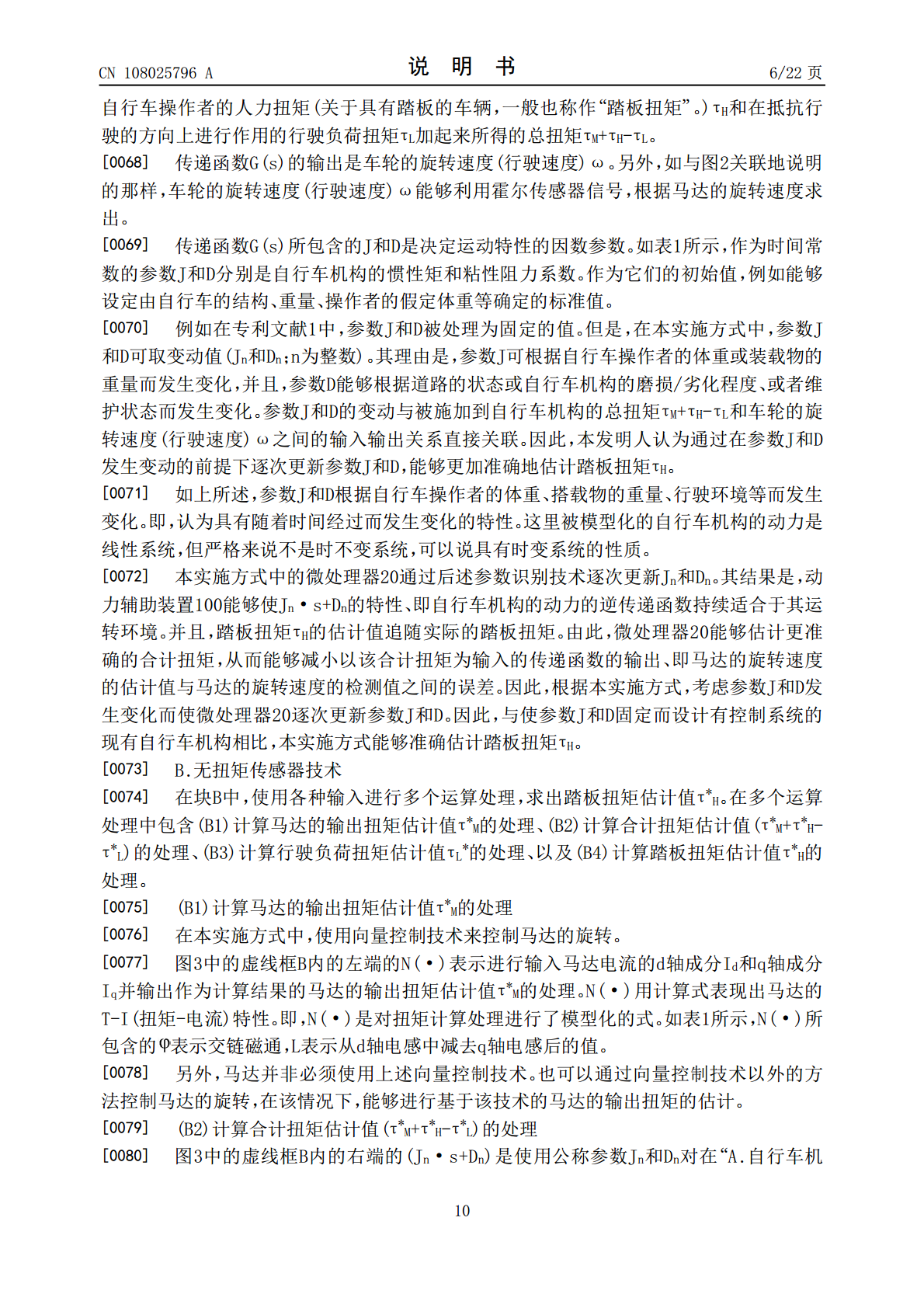
本发明提供了一种辅助转运装置及具有该辅助转运装置的运输车。辅助转运装置包括:用于支撑设备部件的多个立柱组件;用于支撑多个立柱组件的支撑架,支撑架与多个立柱组件连接,其中,立柱组件具有空载状态以及支撑设备部件的装载状态,在装载状态时,立柱组件与设备部件接触以支撑设备部件;在空载状态时,立柱组件相对于支撑架可折叠;安装座,与支撑架连接。本发明的技术方案占用空间小,便于收纳。

车辆自主泊车方法、实施该方法的驾驶员辅助装置以及具有该驾驶员辅助装置的车辆.pdf
本发明涉及一种实施车辆自主泊车过程的方法,其中,在车辆外的操作人员和车辆之间存在一通信连接,通过该通信连接可以传输至少一个激活车辆自主泊车过程的命令,其特征在于,在车辆开始自主泊车过程之前,将车辆的目标位置和/或最后的移动轨迹保存在合适的装置中,在第一次激活自主泊车过程之后,车辆根据储存装置中保存的数据自主从起始位置实施泊车过程。
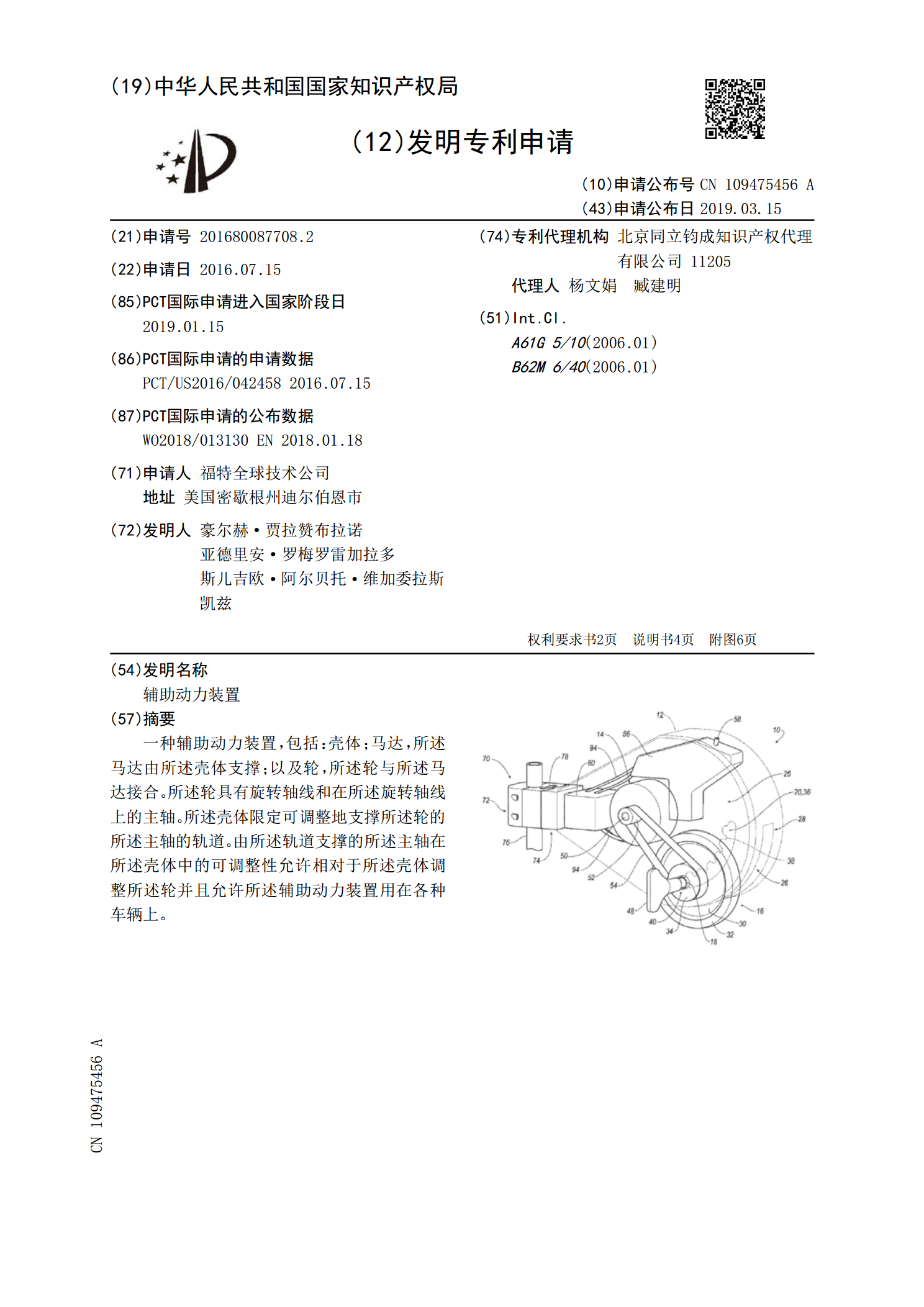
辅助动力装置.pdf
一种辅助动力装置,包括:壳体;马达,所述马达由所述壳体支撑;以及轮,所述轮与所述马达接合。所述轮具有旋转轴线和在所述旋转轴线上的主轴。所述壳体限定可调整地支撑所述轮的所述主轴的轨道。由所述轨道支撑的所述主轴在所述壳体中的可调整性允许相对于所述壳体调整所述轮并且允许所述辅助动力装置用在各种车辆上。
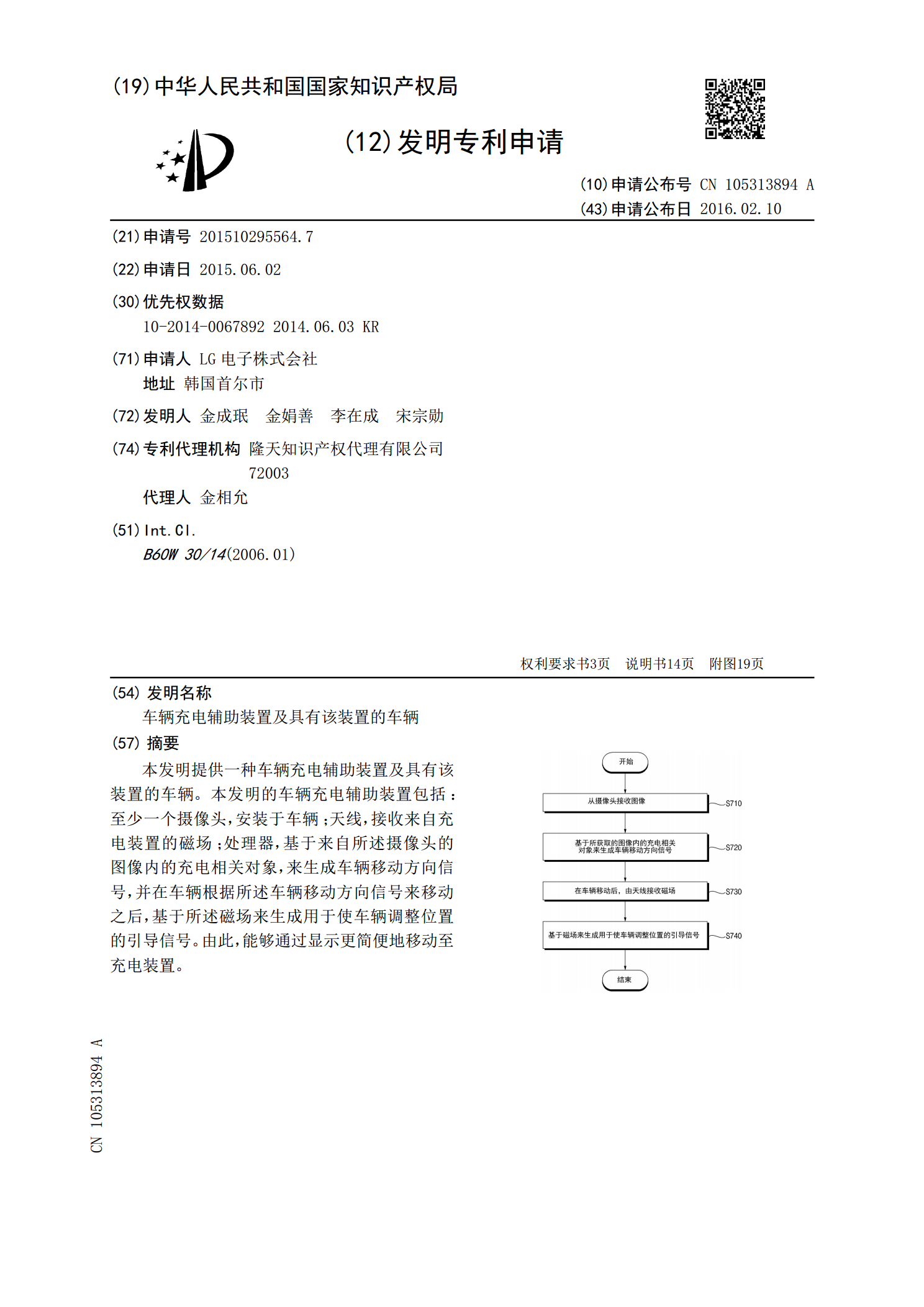
车辆充电辅助装置及具有该装置的车辆.pdf
本发明提供一种车辆充电辅助装置及具有该装置的车辆。本发明的车辆充电辅助装置包括:至少一个摄像头,安装于车辆;天线,接收来自充电装置的磁场;处理器,基于来自所述摄像头的图像内的充电相关对象,来生成车辆移动方向信号,并在车辆根据所述车辆移动方向信号来移动之后,基于所述磁场来生成用于使车辆调整位置的引导信号。由此,能够通过显示更简便地移动至充电装置。