
一种履带式清洁机器人以及清洁系统.pdf

春波****公主


1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种履带式清洁机器人以及清洁系统.pdf
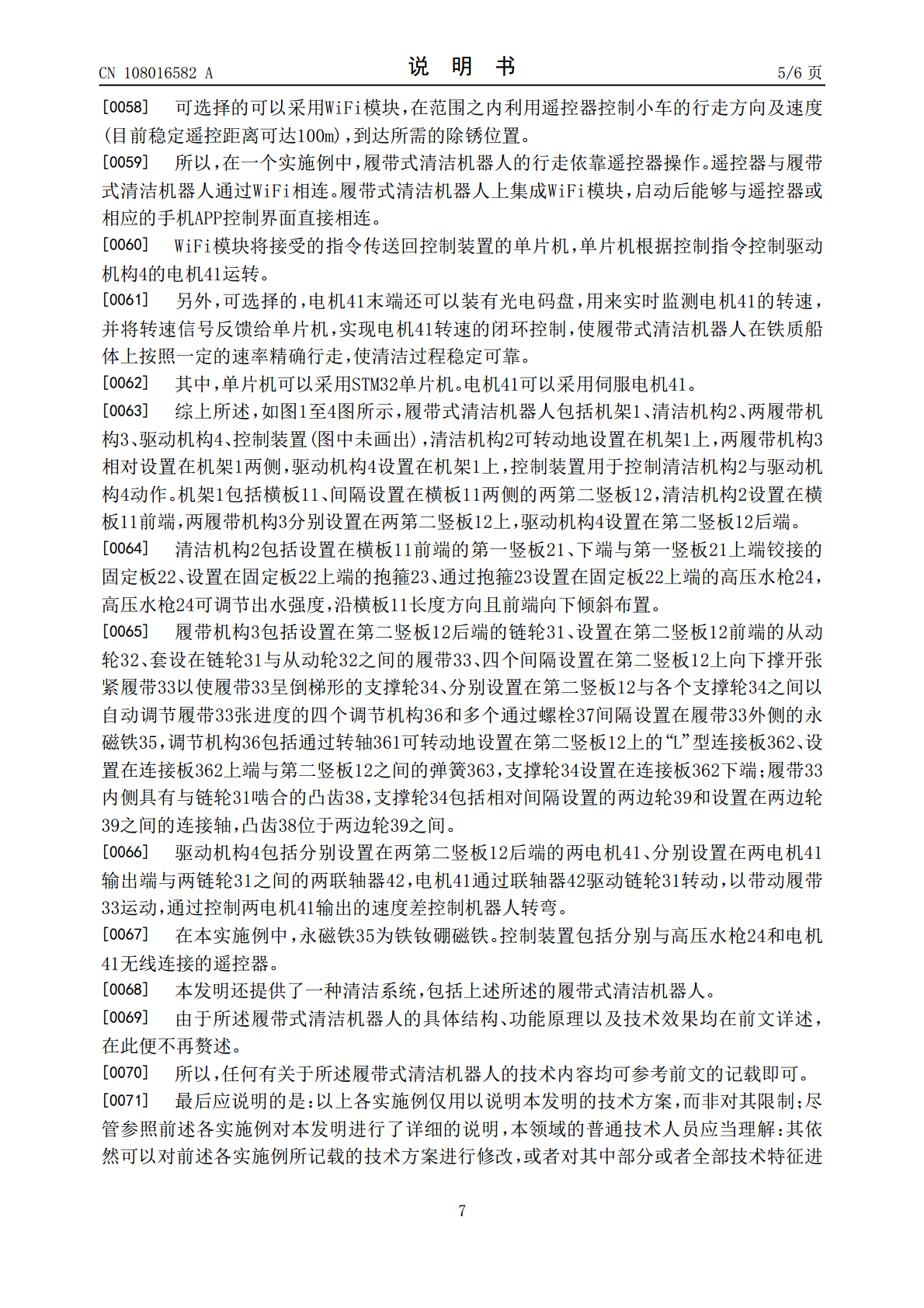
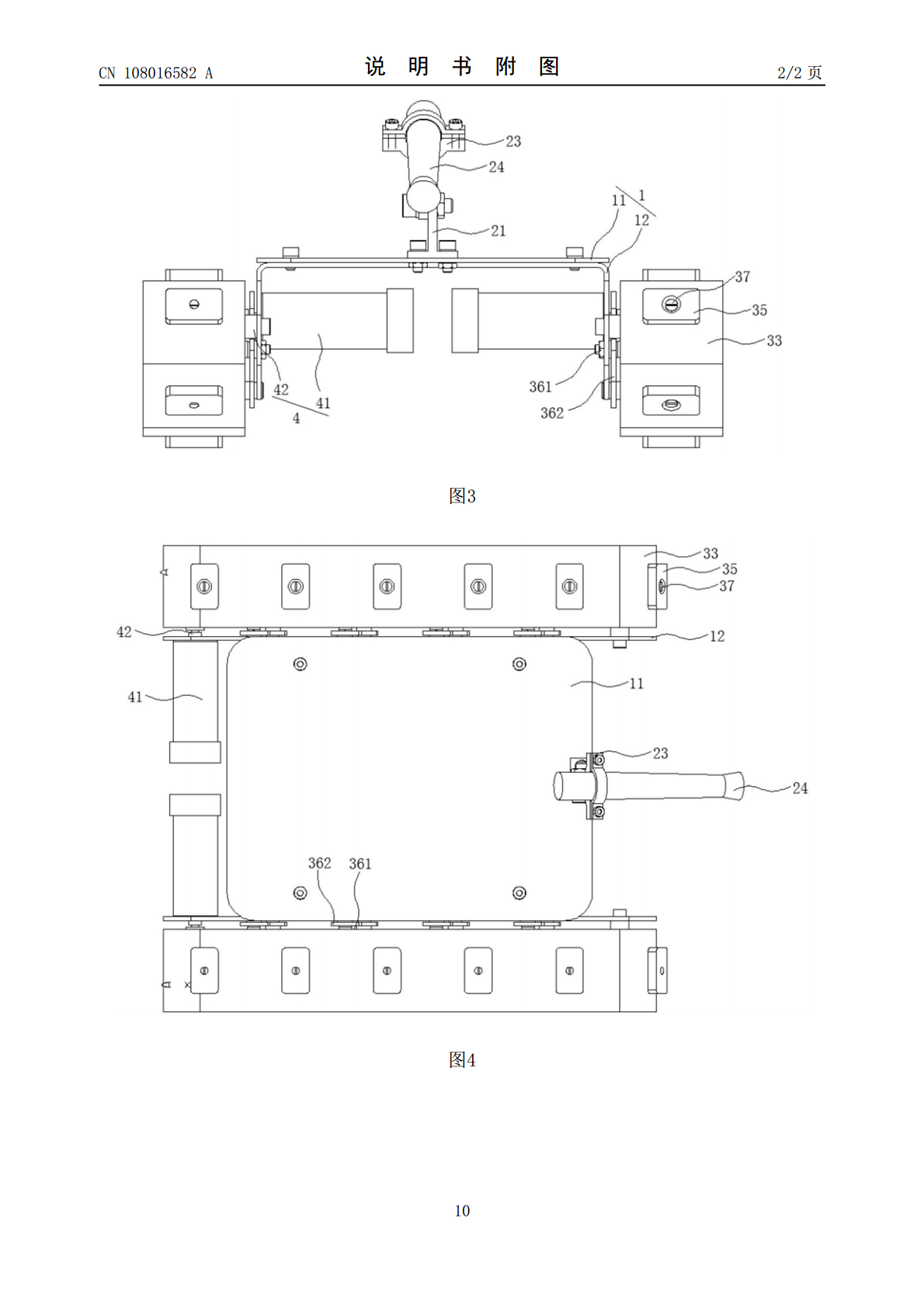
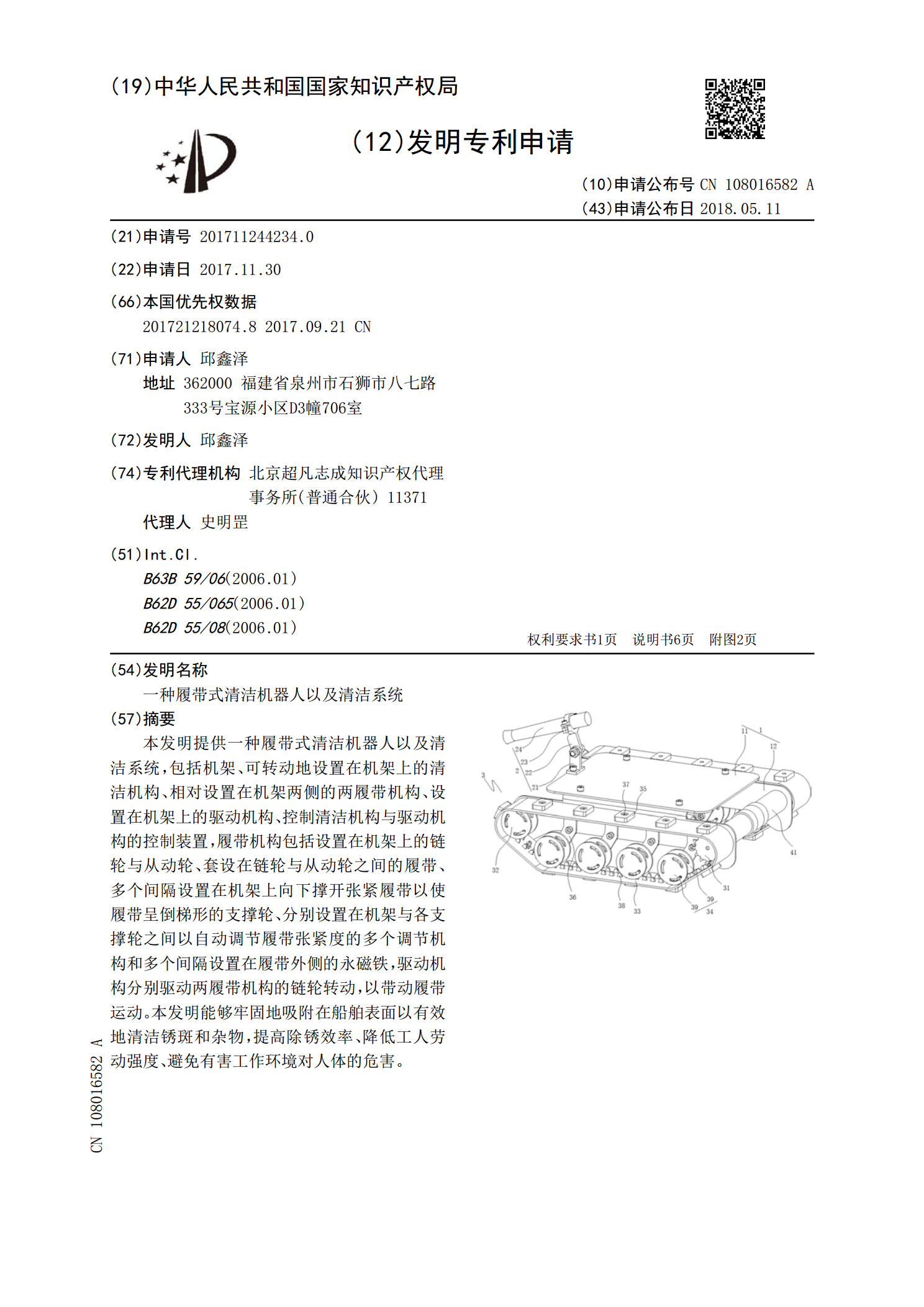
本发明提供一种履带式清洁机器人以及清洁系统,包括机架、可转动地设置在机架上的清洁机构、相对设置在机架两侧的两履带机构、设置在机架上的驱动机构、控制清洁机构与驱动机构的控制装置,履带机构包括设置在机架上的链轮与从动轮、套设在链轮与从动轮之间的履带、多个间隔设置在机架上向下撑开张紧履带以使履带呈倒梯形的支撑轮、分别设置在机架与各支撑轮之间以自动调节履带张紧度的多个调节机构和多个间隔设置在履带外侧的永磁铁,驱动机构分别驱动两履带机构的链轮转动,以带动履带运动。本发明能够牢固地吸附在船舶表面以有效地清洁锈斑和杂物
一种清洁机器人底盘结构以及清洁机器人.pdf
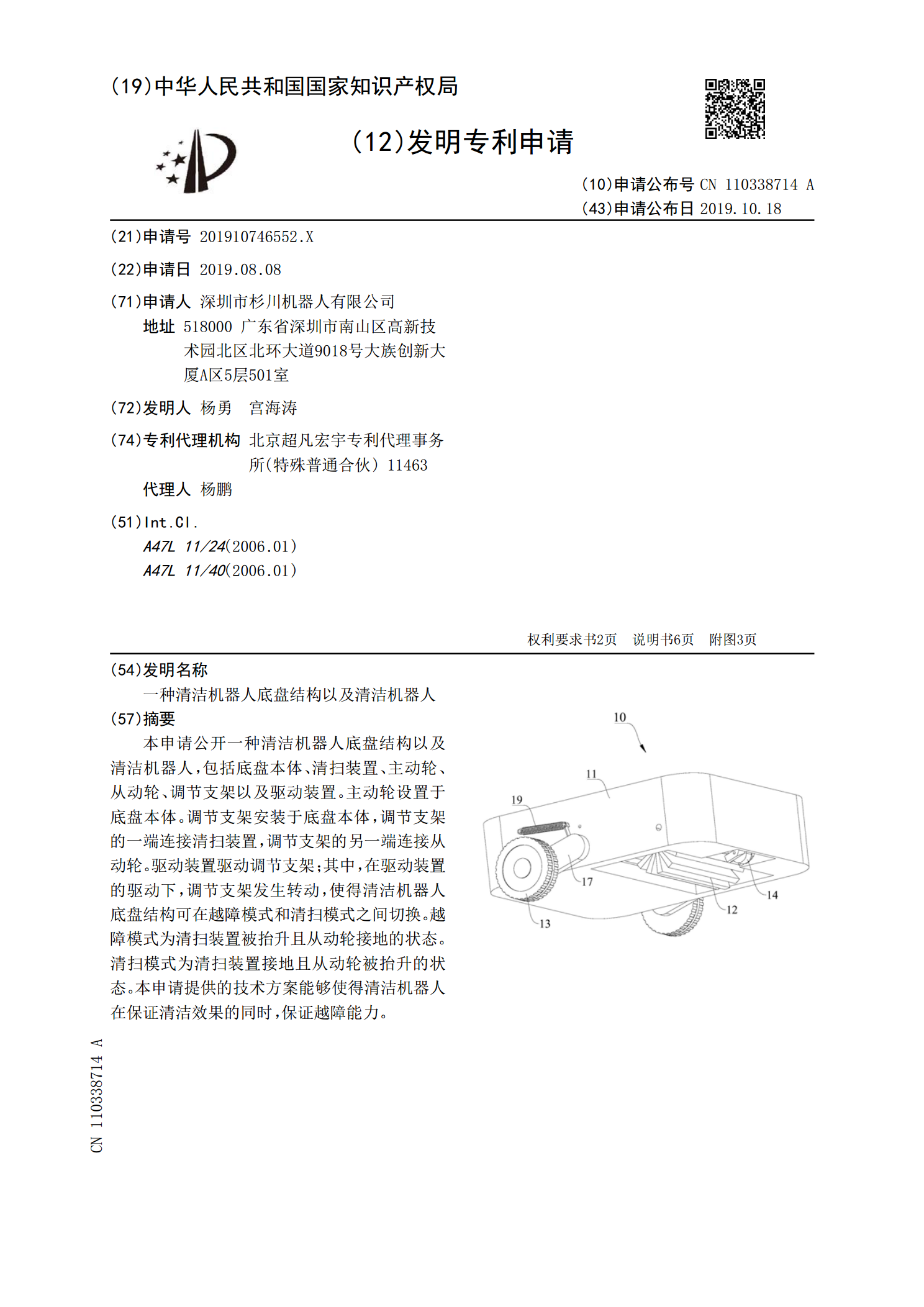
本申请公开一种清洁机器人底盘结构以及清洁机器人,包括底盘本体、清扫装置、主动轮、从动轮、调节支架以及驱动装置。主动轮设置于底盘本体。调节支架安装于底盘本体,调节支架的一端连接清扫装置,调节支架的另一端连接从动轮。驱动装置驱动调节支架;其中,在驱动装置的驱动下,调节支架发生转动,使得清洁机器人底盘结构可在越障模式和清扫模式之间切换。越障模式为清扫装置被抬升且从动轮接地的状态。清扫模式为清扫装置接地且从动轮被抬升的状态。本申请提供的技术方案能够使得清洁机器人在保证清洁效果的同时,保证越障能力。

一种支架以及清洁机器人.pdf
本发明属于清洁机器人技术设备领域,尤其涉及一种支架以及清洁机器人。支架配置为将液体导流至目标物。支架开设有收容目标物的转接腔,转接腔的腔壁开设有连通外部空间的避让槽,目标物的两端分别转动连接转接腔的两侧腔壁,且目标物的侧表面经避让槽部分露出转接腔,支架还开设有布水流道,布水流道的两端分别朝目标物的两转接端延伸,支架的表面开设有供液体流入布水流道的进水孔,支架于转接腔内开设有供液体流出布水流道的出水孔,液体经出水孔而喷射至目标物。本发明通过在支架上直接开设布水流道,不但可以对滚刷进行喷水,而且污水箱上无需再

清洁机器人以及基于清洁机器人的检测方法.pdf
本发明公开了一种清洁机器人以及基于清洁机器人的检测方法,可以适用在监测清洁机器人是否被搬起的应用场景中,通过获取测距传感器的有效扫描数据,有效扫描数据包括多个扫描点的测量距离以及与该测量距离对应的扫描角度,然后在预存角度与扫描角度对应相同的条件下,一一对应地比较预存距离与测量距离的大小,其中预存距离小于或等于预存角度指向机器人本体的外周缘的距离,若至少一个扫描点的测量距离小于预存距离,则控制清洁机器人执行停止驱动轮、中扫、边刷等转动的应急动作,避免带来潜在危险。
清洁机器人底盘以及清洁机器人.pdf
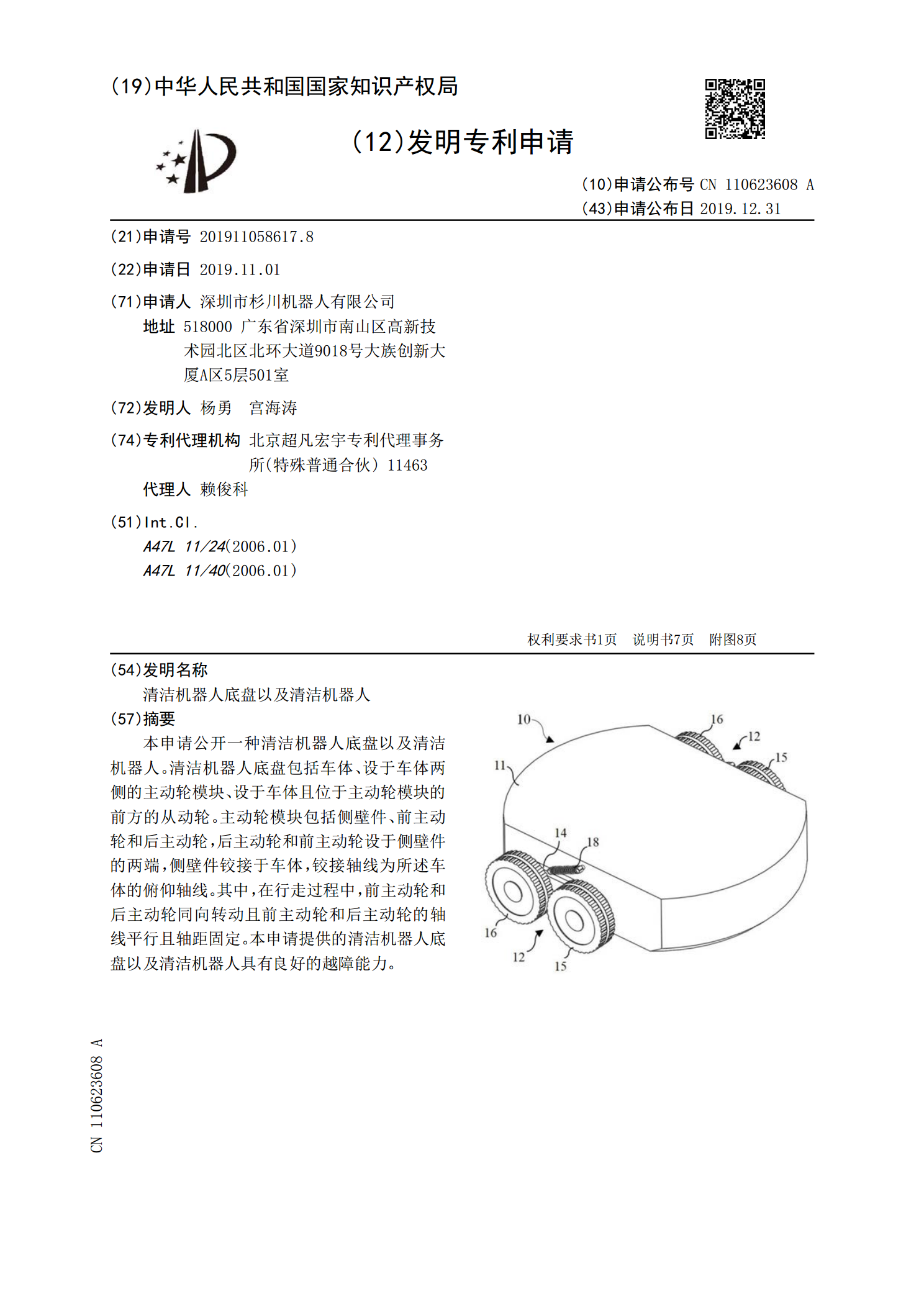
本申请公开一种清洁机器人底盘以及清洁机器人。清洁机器人底盘包括车体、设于车体两侧的主动轮模块、设于车体且位于主动轮模块的前方的从动轮。主动轮模块包括侧壁件、前主动轮和后主动轮,后主动轮和前主动轮设于侧壁件的两端,侧壁件铰接于车体,铰接轴线为所述车体的俯仰轴线。其中,在行走过程中,前主动轮和后主动轮同向转动且前主动轮和后主动轮的轴线平行且轴距固定。本申请提供的清洁机器人底盘以及清洁机器人具有良好的越障能力。