
清洁机器人底盘以及清洁机器人.pdf

Do****76


1/10
2/10
3/10

4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
清洁机器人底盘以及清洁机器人.pdf
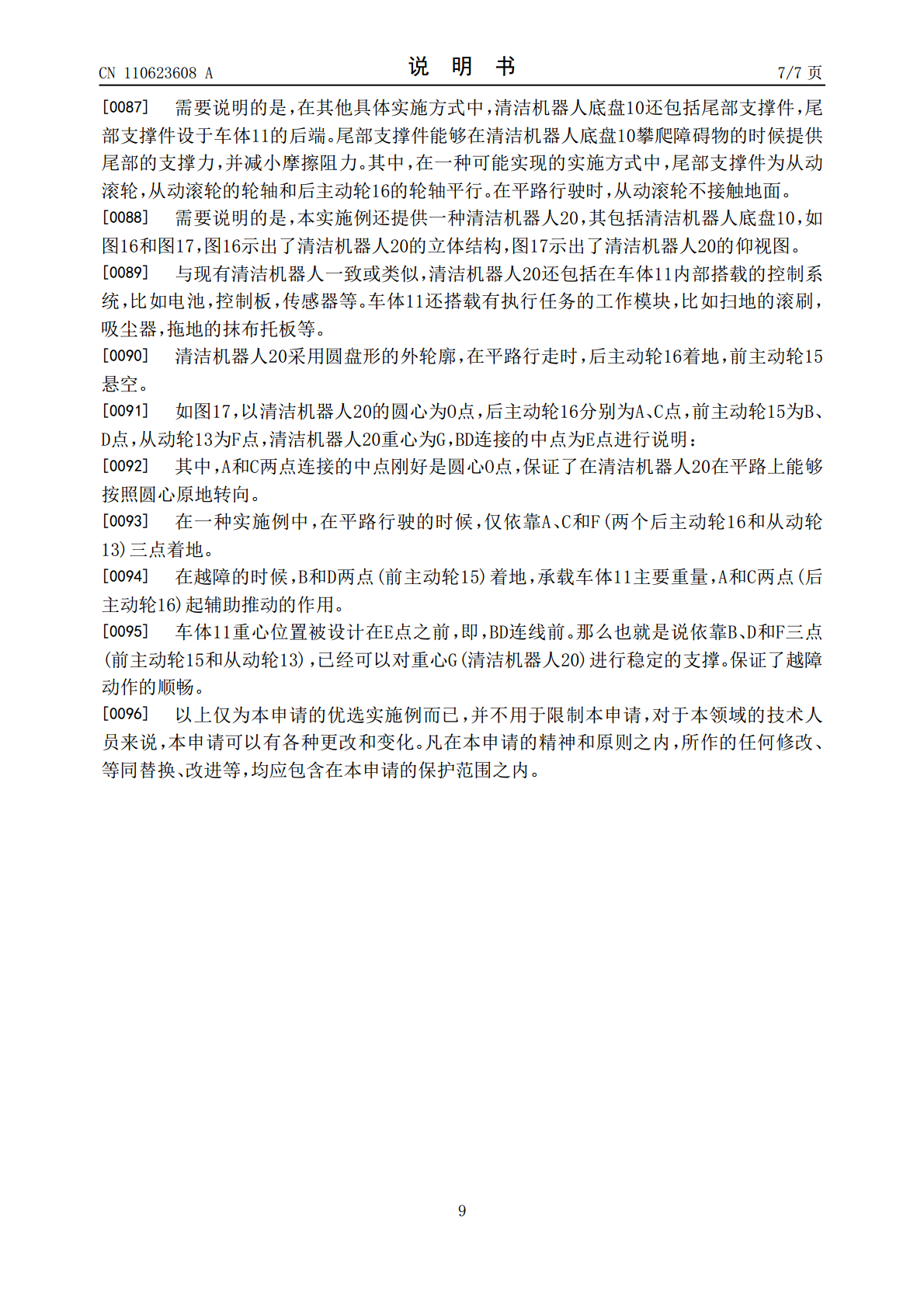
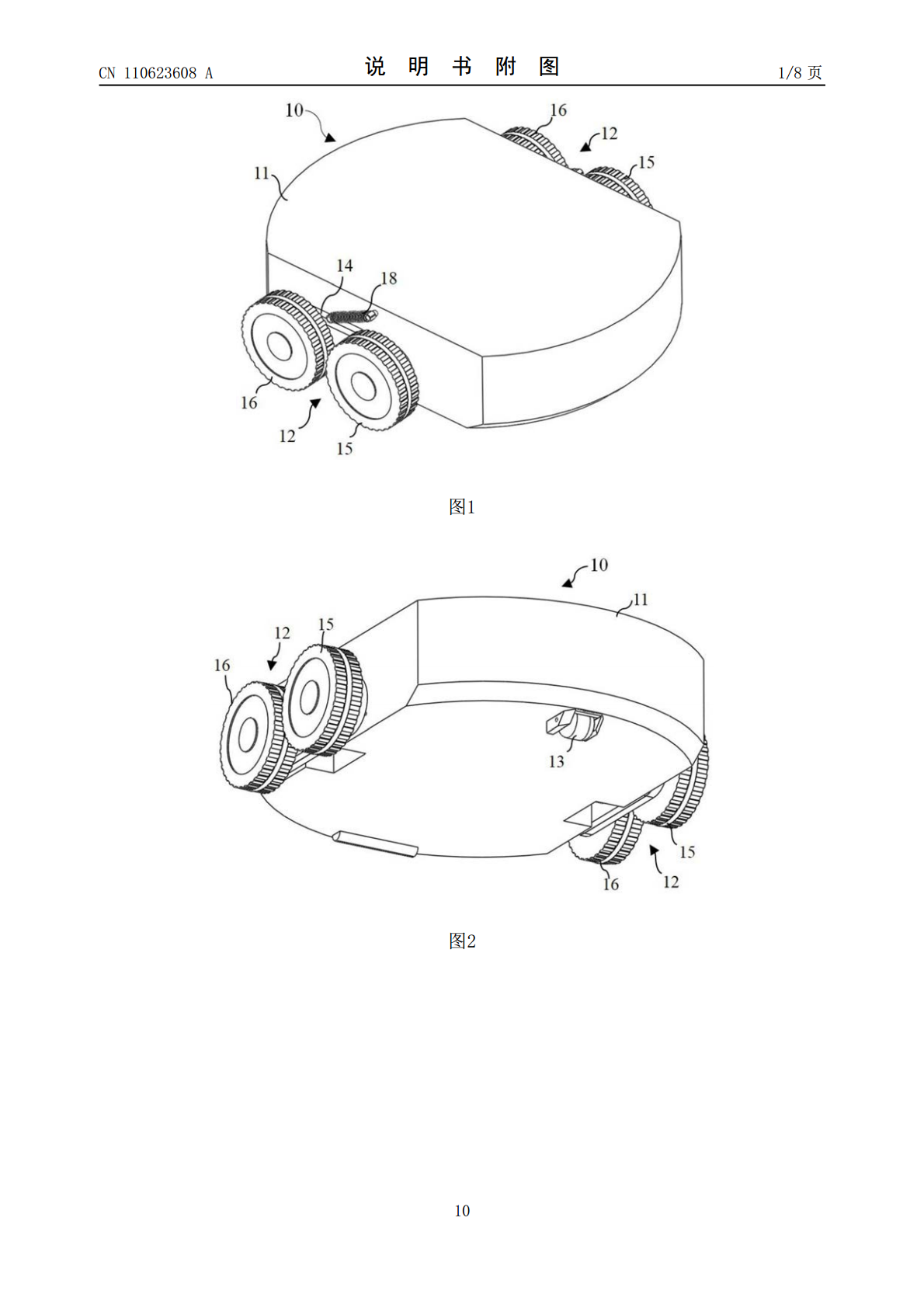
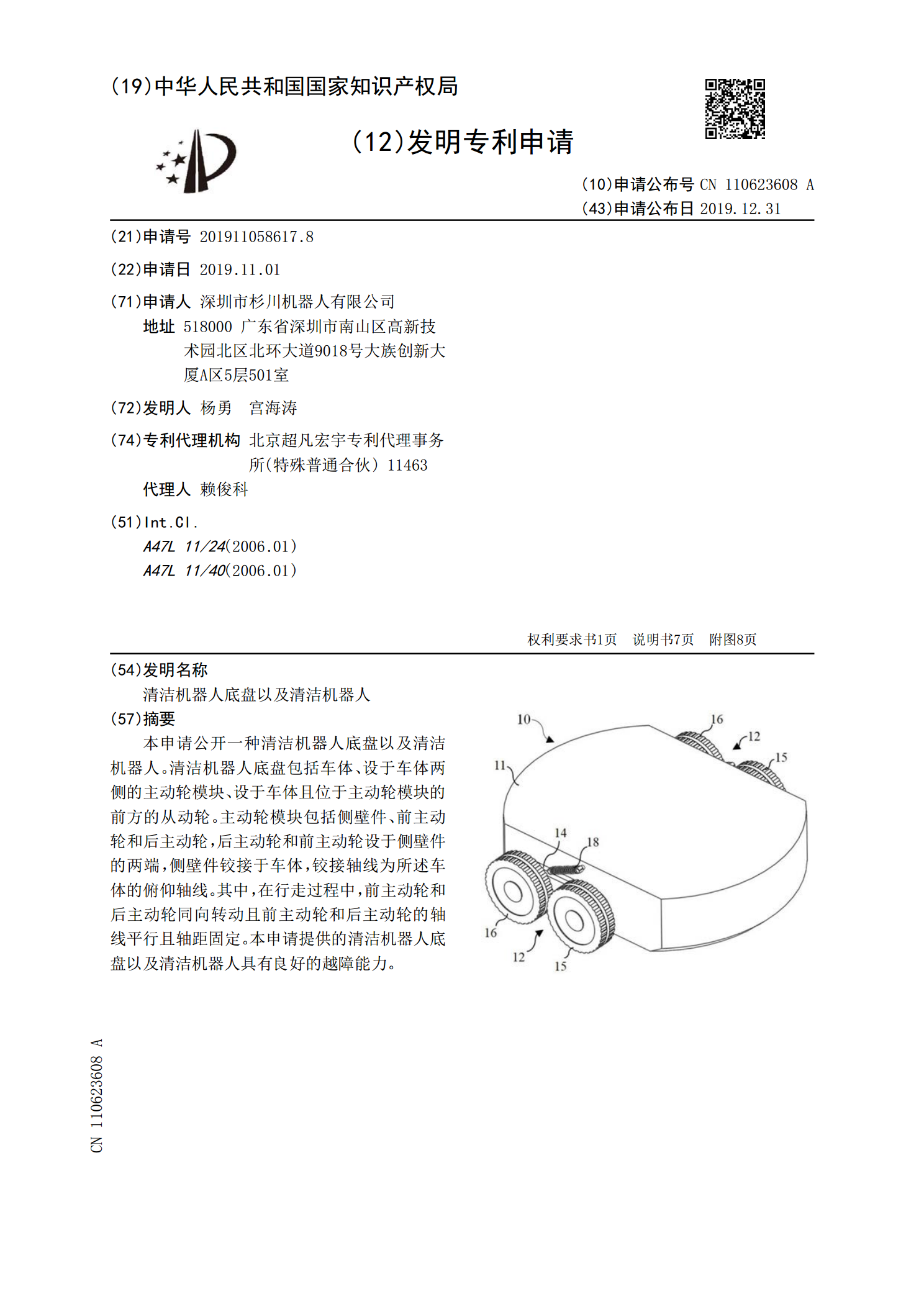
本申请公开一种清洁机器人底盘以及清洁机器人。清洁机器人底盘包括车体、设于车体两侧的主动轮模块、设于车体且位于主动轮模块的前方的从动轮。主动轮模块包括侧壁件、前主动轮和后主动轮,后主动轮和前主动轮设于侧壁件的两端,侧壁件铰接于车体,铰接轴线为所述车体的俯仰轴线。其中,在行走过程中,前主动轮和后主动轮同向转动且前主动轮和后主动轮的轴线平行且轴距固定。本申请提供的清洁机器人底盘以及清洁机器人具有良好的越障能力。
一种清洁机器人底盘结构以及清洁机器人.pdf
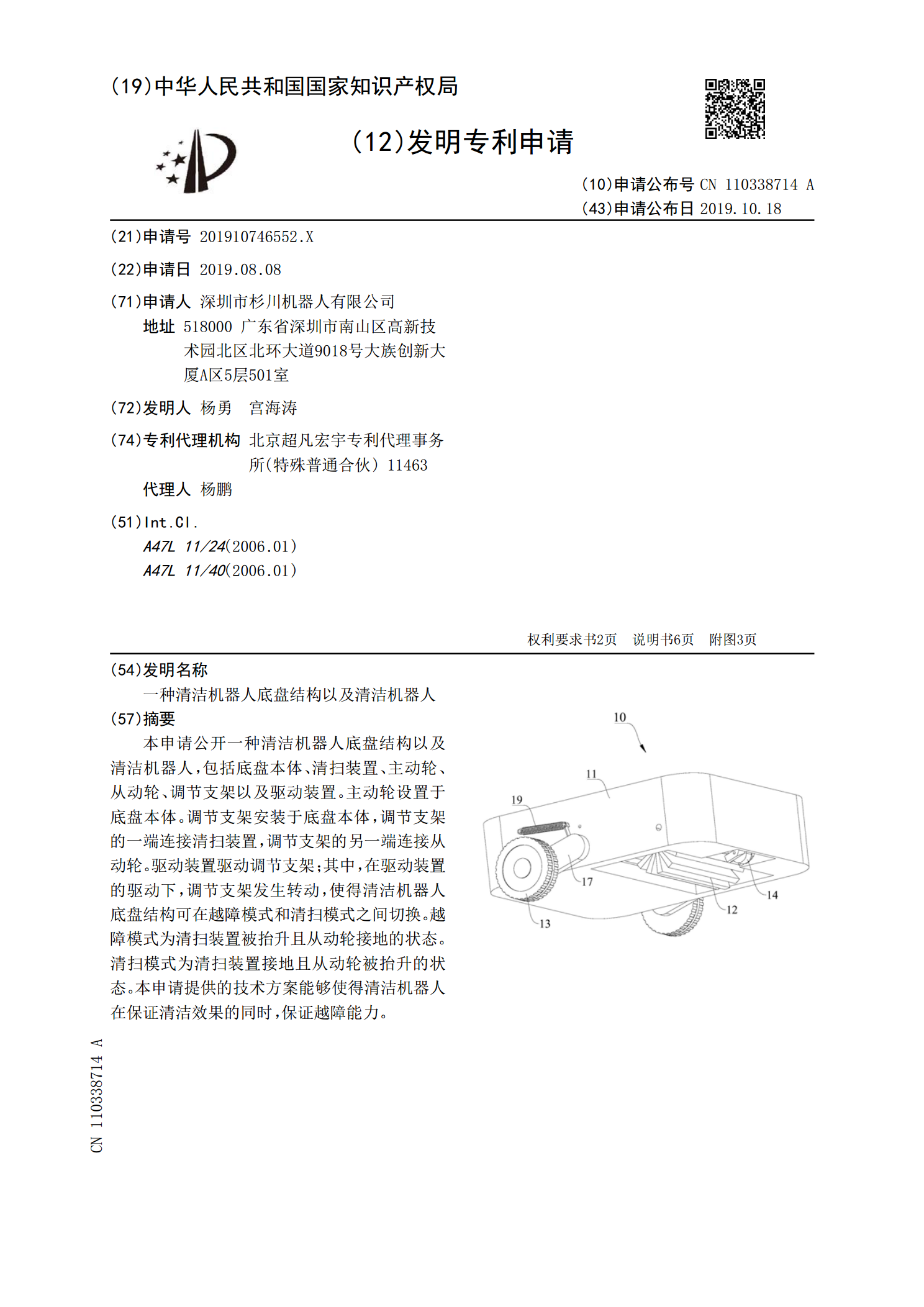
本申请公开一种清洁机器人底盘结构以及清洁机器人,包括底盘本体、清扫装置、主动轮、从动轮、调节支架以及驱动装置。主动轮设置于底盘本体。调节支架安装于底盘本体,调节支架的一端连接清扫装置,调节支架的另一端连接从动轮。驱动装置驱动调节支架;其中,在驱动装置的驱动下,调节支架发生转动,使得清洁机器人底盘结构可在越障模式和清扫模式之间切换。越障模式为清扫装置被抬升且从动轮接地的状态。清扫模式为清扫装置接地且从动轮被抬升的状态。本申请提供的技术方案能够使得清洁机器人在保证清洁效果的同时,保证越障能力。

清洁机器人以及基于清洁机器人的检测方法.pdf
本发明公开了一种清洁机器人以及基于清洁机器人的检测方法,可以适用在监测清洁机器人是否被搬起的应用场景中,通过获取测距传感器的有效扫描数据,有效扫描数据包括多个扫描点的测量距离以及与该测量距离对应的扫描角度,然后在预存角度与扫描角度对应相同的条件下,一一对应地比较预存距离与测量距离的大小,其中预存距离小于或等于预存角度指向机器人本体的外周缘的距离,若至少一个扫描点的测量距离小于预存距离,则控制清洁机器人执行停止驱动轮、中扫、边刷等转动的应急动作,避免带来潜在危险。
清洁机器人的清洁控制方法、清洁机器人以及存储介质.pdf
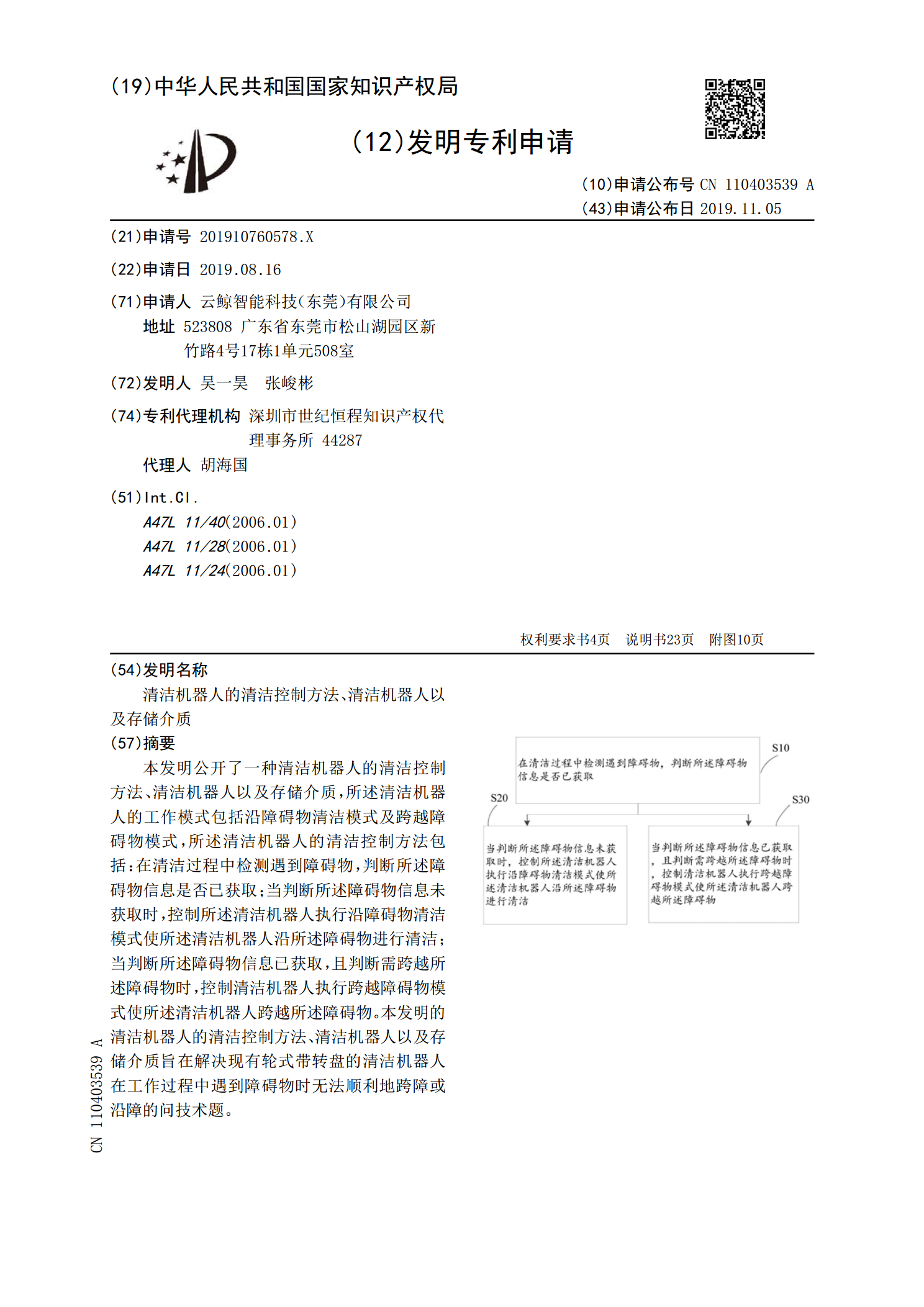
本发明公开了一种清洁机器人的清洁控制方法、清洁机器人以及存储介质,所述清洁机器人的工作模式包括沿障碍物清洁模式及跨越障碍物模式,所述清洁机器人的清洁控制方法包括:在清洁过程中检测遇到障碍物,判断所述障碍物信息是否已获取;当判断所述障碍物信息未获取时,控制所述清洁机器人执行沿障碍物清洁模式使所述清洁机器人沿所述障碍物进行清洁;当判断所述障碍物信息已获取,且判断需跨越所述障碍物时,控制清洁机器人执行跨越障碍物模式使所述清洁机器人跨越所述障碍物。本发明的清洁机器人的清洁控制方法、清洁机器人以及存储介质旨在解决现

传动装置以及清洁机器人.pdf
本发明公开了一种传动装置,其包括在电机和运动构件之间依次传动联接的多个齿轮,多个齿轮的至少其中之一为释力齿轮。释力齿轮包括同轴设置的作为动力输入端的第一子齿轮和作为动力输出端的第二子齿轮,第二子齿轮通过一弹性架卡合连接至第一子齿轮。其中,在第二子齿轮运转受阻时,弹性架可相对于第一子齿轮滑动以避免第一子齿轮停止转动。本发明还公开了包含以上传动装置的清洁机器人。本发明提供的传动装置,在输出力臂受阻而停止运动时,可以通过释力齿轮来吸收释放从其前端输入的扭力,能够有效地保护传动装置和电机,可以极大地降低甚至是避免