
电动汽车及其制动能量回收方法.pdf

一条****杉淑

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
电动汽车及其制动能量回收方法.pdf
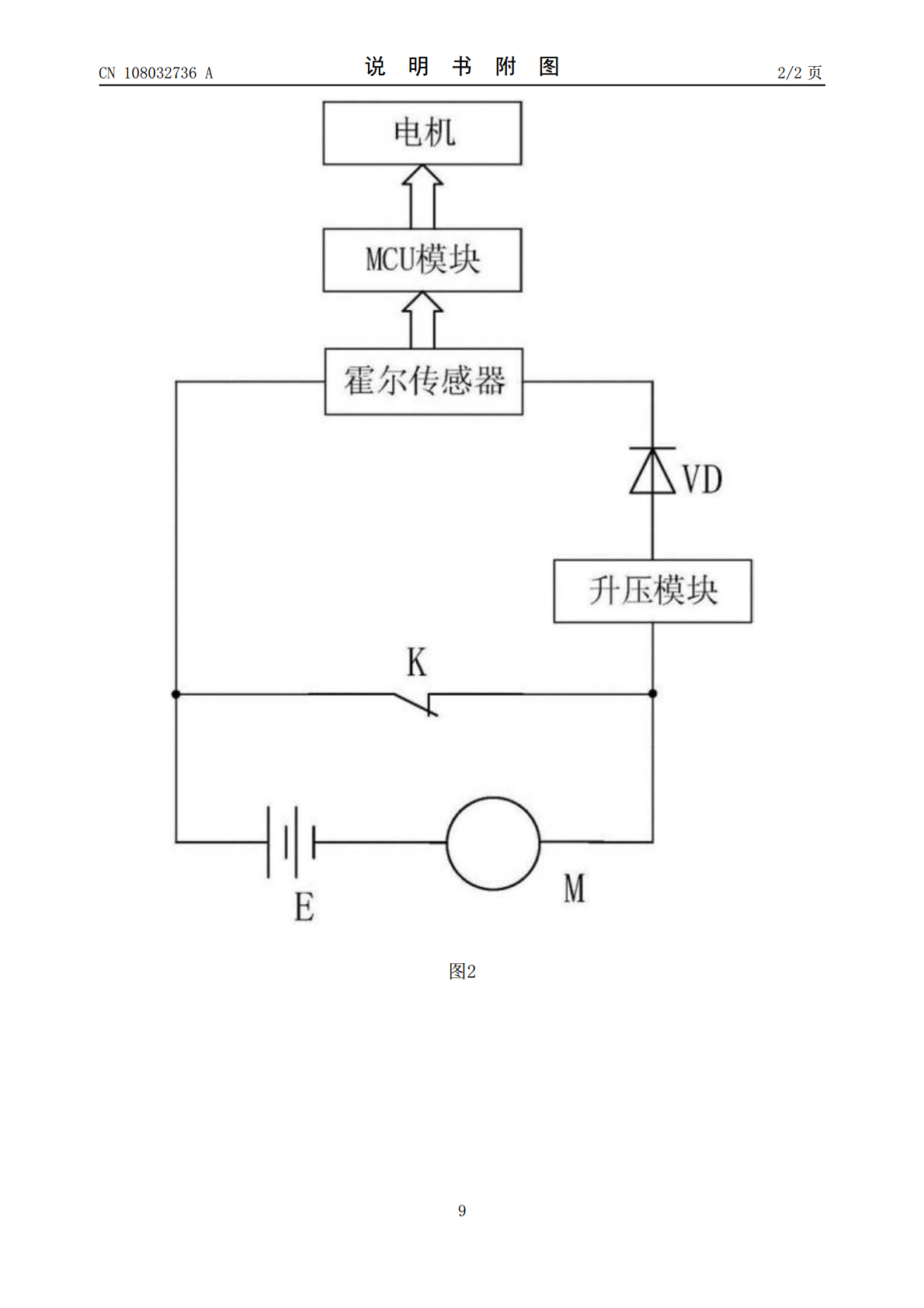
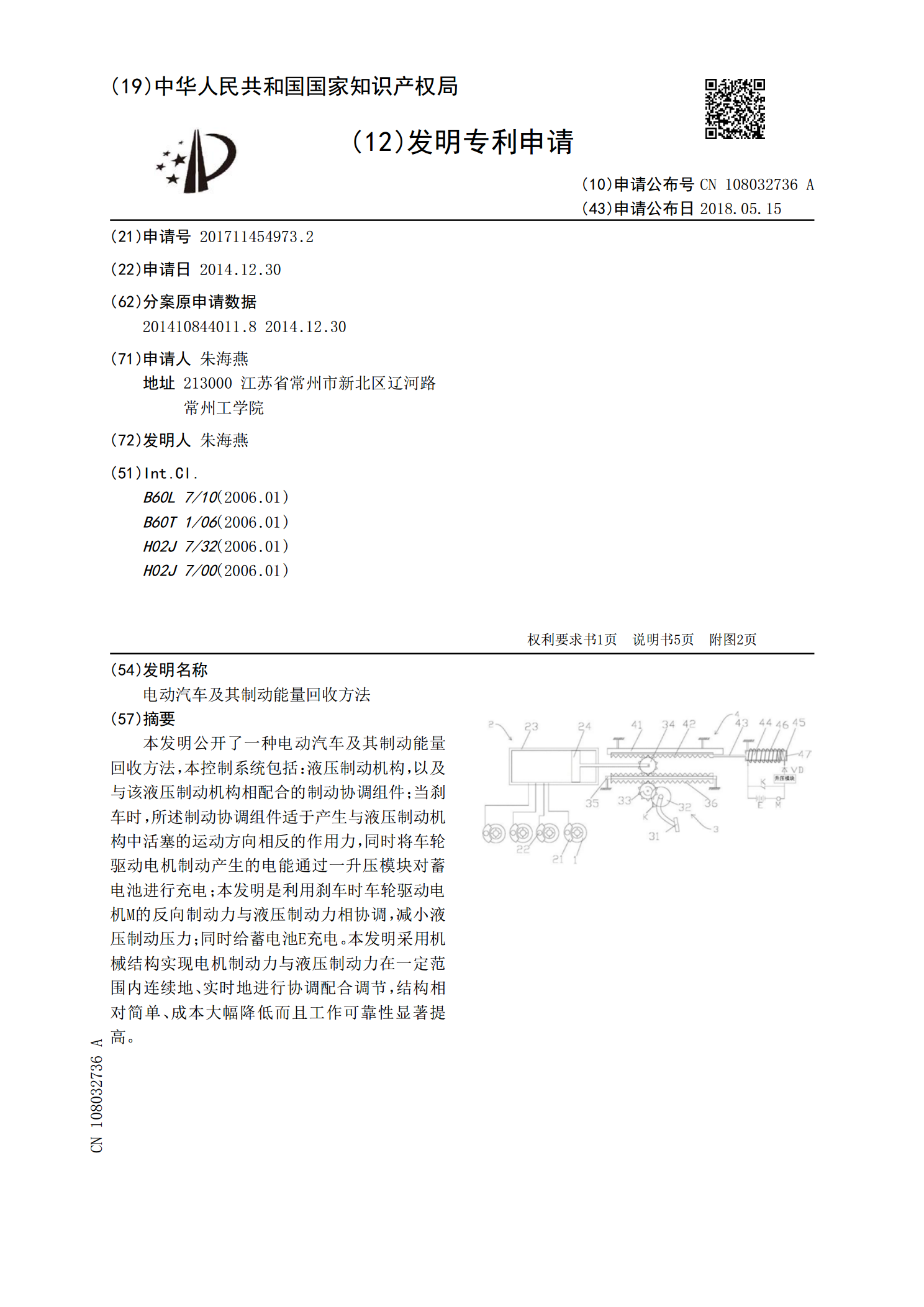
本发明公开了一种电动汽车及其制动能量回收方法,本控制系统包括:液压制动机构,以及与该液压制动机构相配合的制动协调组件;当刹车时,所述制动协调组件适于产生与液压制动机构中活塞的运动方向相反的作用力,同时将车轮驱动电机制动产生的电能通过一升压模块对蓄电池进行充电;本发明是利用刹车时车轮驱动电机M的反向制动力与液压制动力相协调,减小液压制动压力;同时给蓄电池E充电。本发明采用机械结构实现电机制动力与液压制动力在一定范围内连续地、实时地进行协调配合调节,结构相对简单、成本大幅降低而且工作可靠性显著提高。
基于压电材料回收制动能量的电动汽车制动能量回收方法.pdf
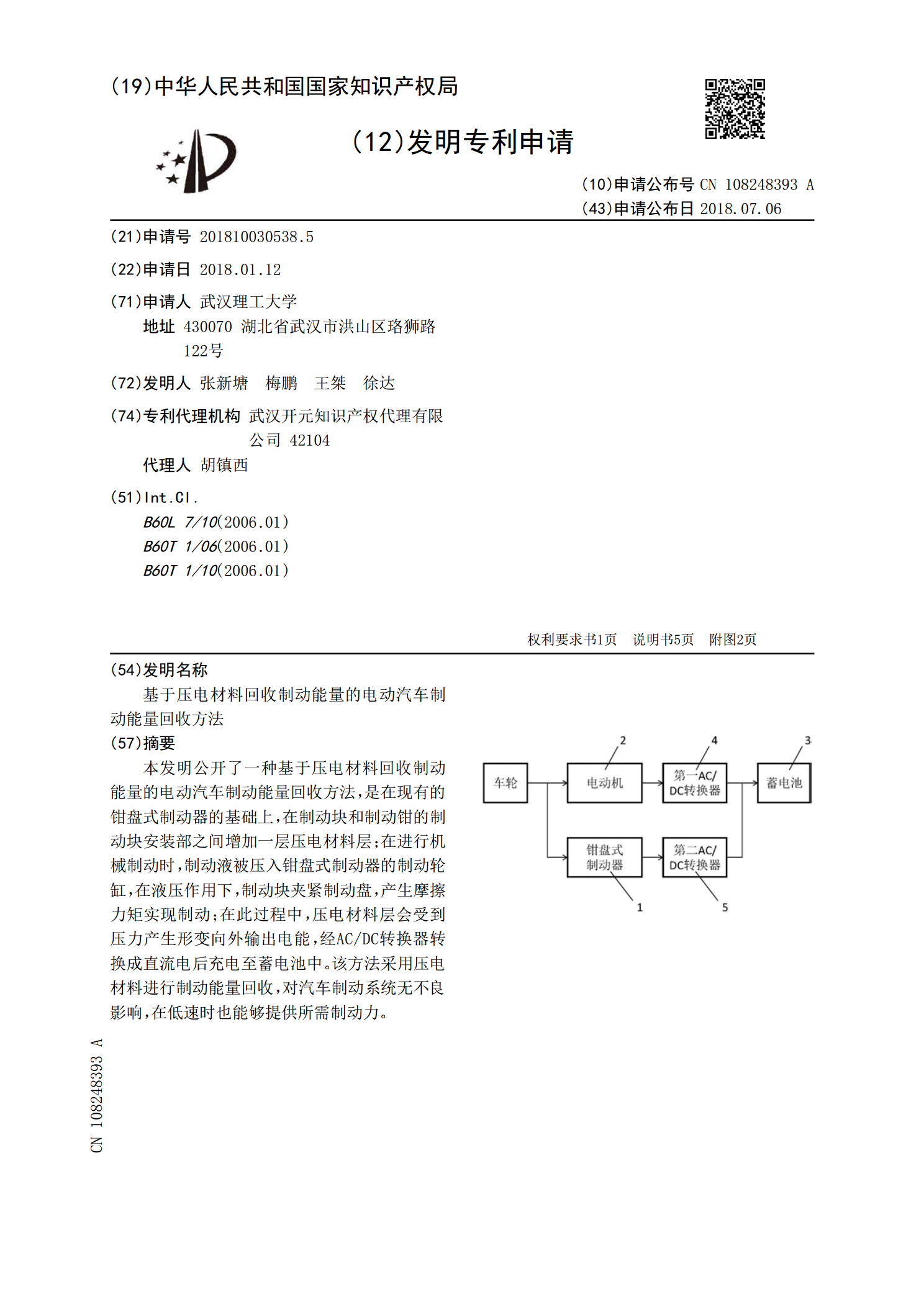
本发明公开了一种基于压电材料回收制动能量的电动汽车制动能量回收方法,是在现有的钳盘式制动器的基础上,在制动块和制动钳的制动块安装部之间增加一层压电材料层;在进行机械制动时,制动液被压入钳盘式制动器的制动轮缸,在液压作用下,制动块夹紧制动盘,产生摩擦力矩实现制动;在此过程中,压电材料层会受到压力产生形变向外输出电能,经AC/DC转换器转换成直流电后充电至蓄电池中。该方法采用压电材料进行制动能量回收,对汽车制动系统无不良影响,在低速时也能够提供所需制动力。
电动汽车制动能量回收系统及方法.pdf
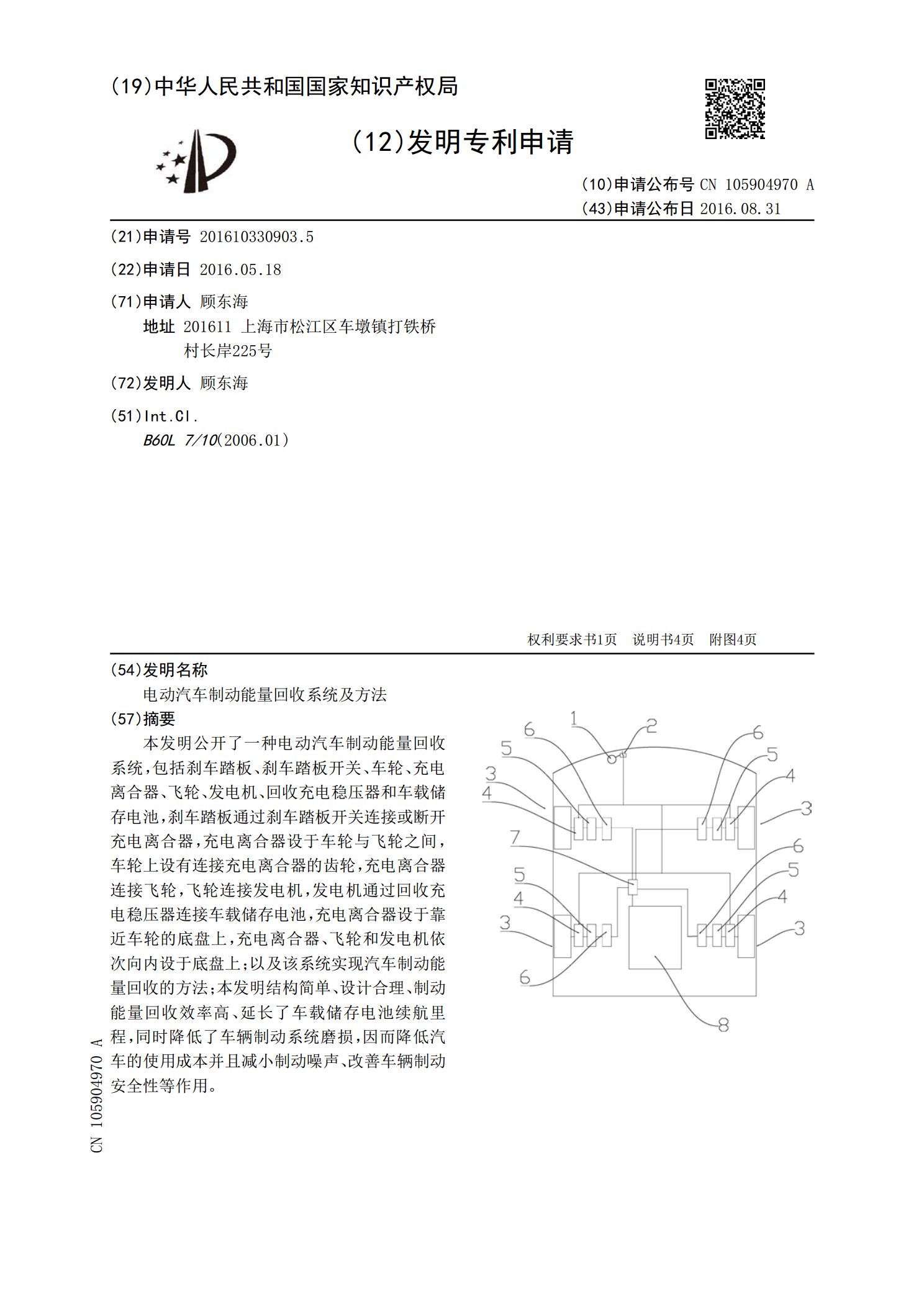
本发明公开了一种电动汽车制动能量回收系统,包括刹车踏板、刹车踏板开关、车轮、充电离合器、飞轮、发电机、回收充电稳压器和车载储存电池,刹车踏板通过刹车踏板开关连接或断开充电离合器,充电离合器设于车轮与飞轮之间,车轮上设有连接充电离合器的齿轮,充电离合器连接飞轮,飞轮连接发电机,发电机通过回收充电稳压器连接车载储存电池,充电离合器设于靠近车轮的底盘上,充电离合器、飞轮和发电机依次向内设于底盘上;以及该系统实现汽车制动能量回收的方法;本发明结构简单、设计合理、制动能量回收效率高、延长了车载储存电池续航里程,同时
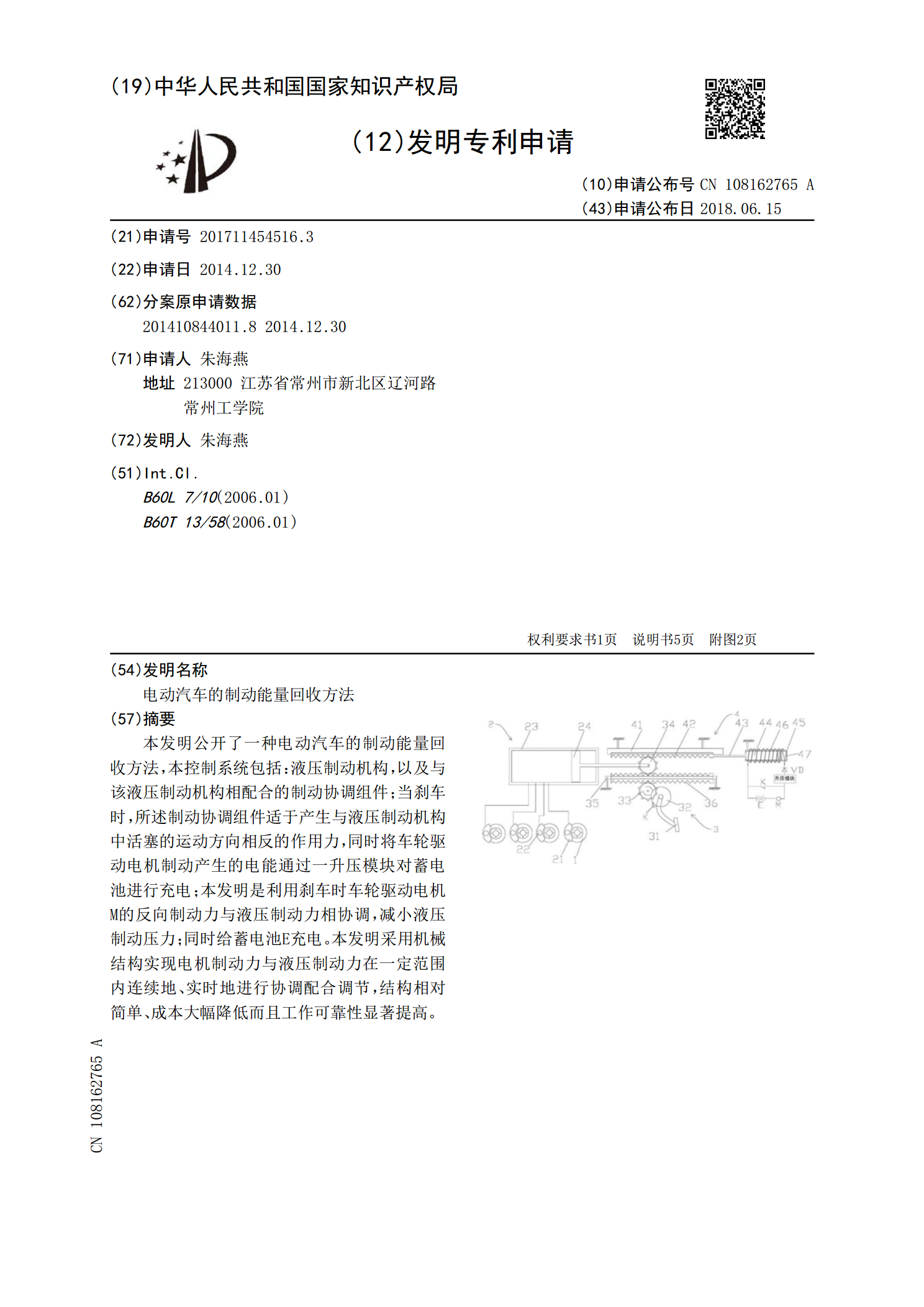
电动汽车的制动能量回收方法.pdf
本发明公开了一种电动汽车的制动能量回收方法,本控制系统包括:液压制动机构,以及与该液压制动机构相配合的制动协调组件;当刹车时,所述制动协调组件适于产生与液压制动机构中活塞的运动方向相反的作用力,同时将车轮驱动电机制动产生的电能通过一升压模块对蓄电池进行充电;本发明是利用刹车时车轮驱动电机M的反向制动力与液压制动力相协调,减小液压制动压力;同时给蓄电池E充电。本发明采用机械结构实现电机制动力与液压制动力在一定范围内连续地、实时地进行协调配合调节,结构相对简单、成本大幅降低而且工作可靠性显著提高。
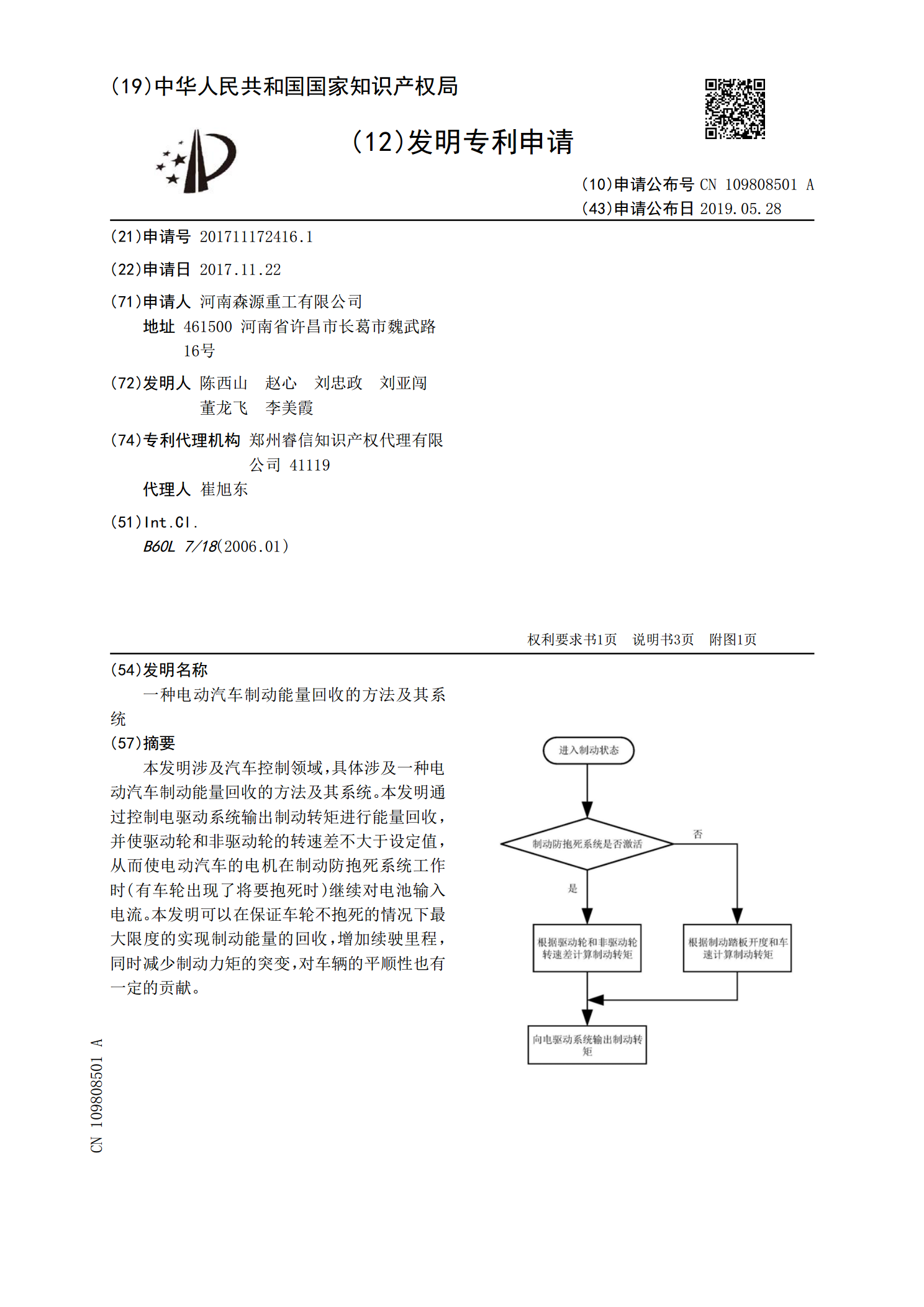
一种电动汽车制动能量回收的方法及其系统.pdf
本发明涉及汽车控制领域,具体涉及一种电动汽车制动能量回收的方法及其系统。本发明通过控制电驱动系统输出制动转矩进行能量回收,并使驱动轮和非驱动轮的转速差不大于设定值,从而使电动汽车的电机在制动防抱死系统工作时(有车轮出现了将要抱死时)继续对电池输入电流。本发明可以在保证车轮不抱死的情况下最大限度的实现制动能量的回收,增加续驶里程,同时减少制动力矩的突变,对车辆的平顺性也有一定的贡献。