
一种自动驾驶汽车线控转向系统.pdf

黛娥****ak

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自动驾驶汽车线控转向系统.pdf
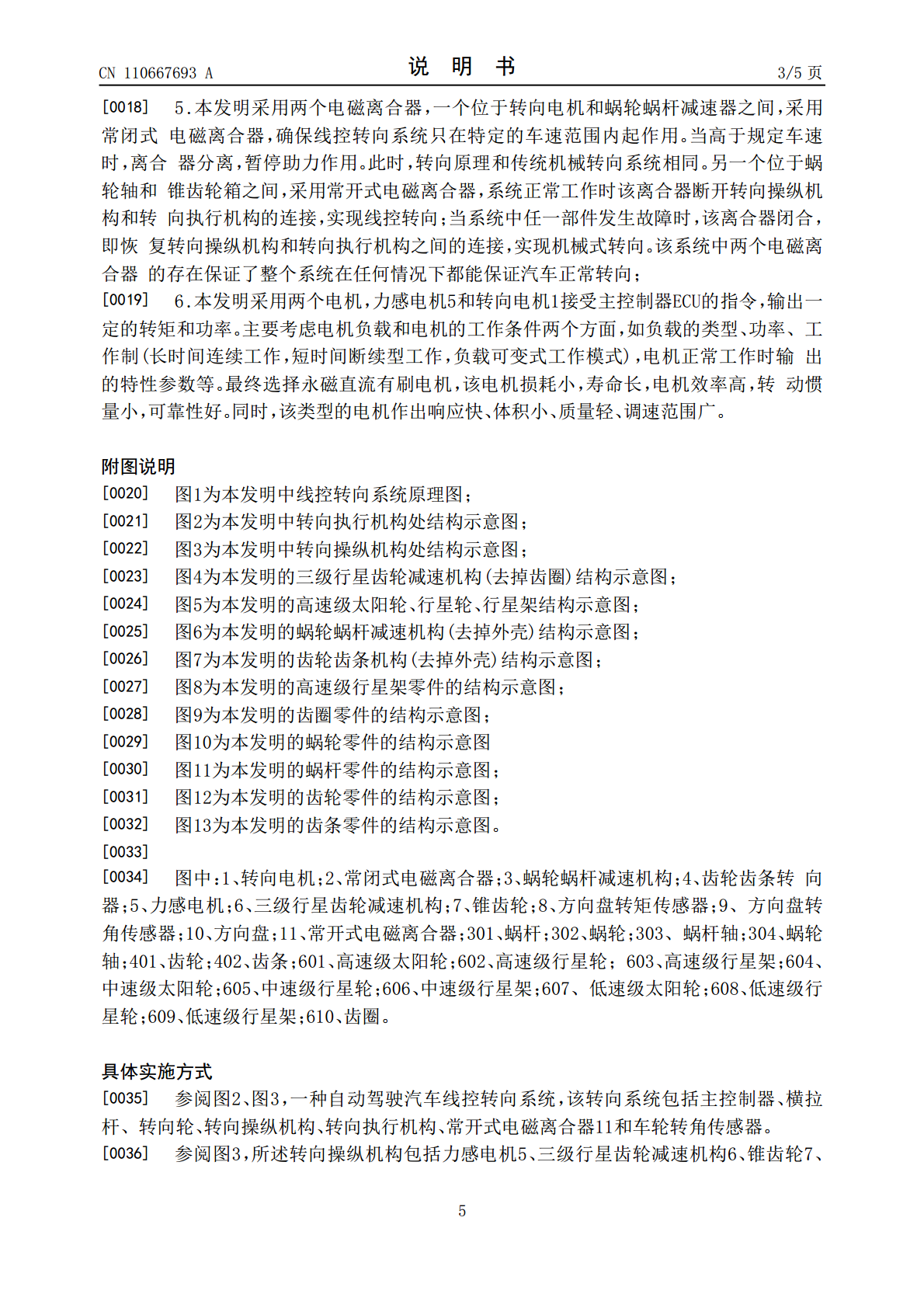
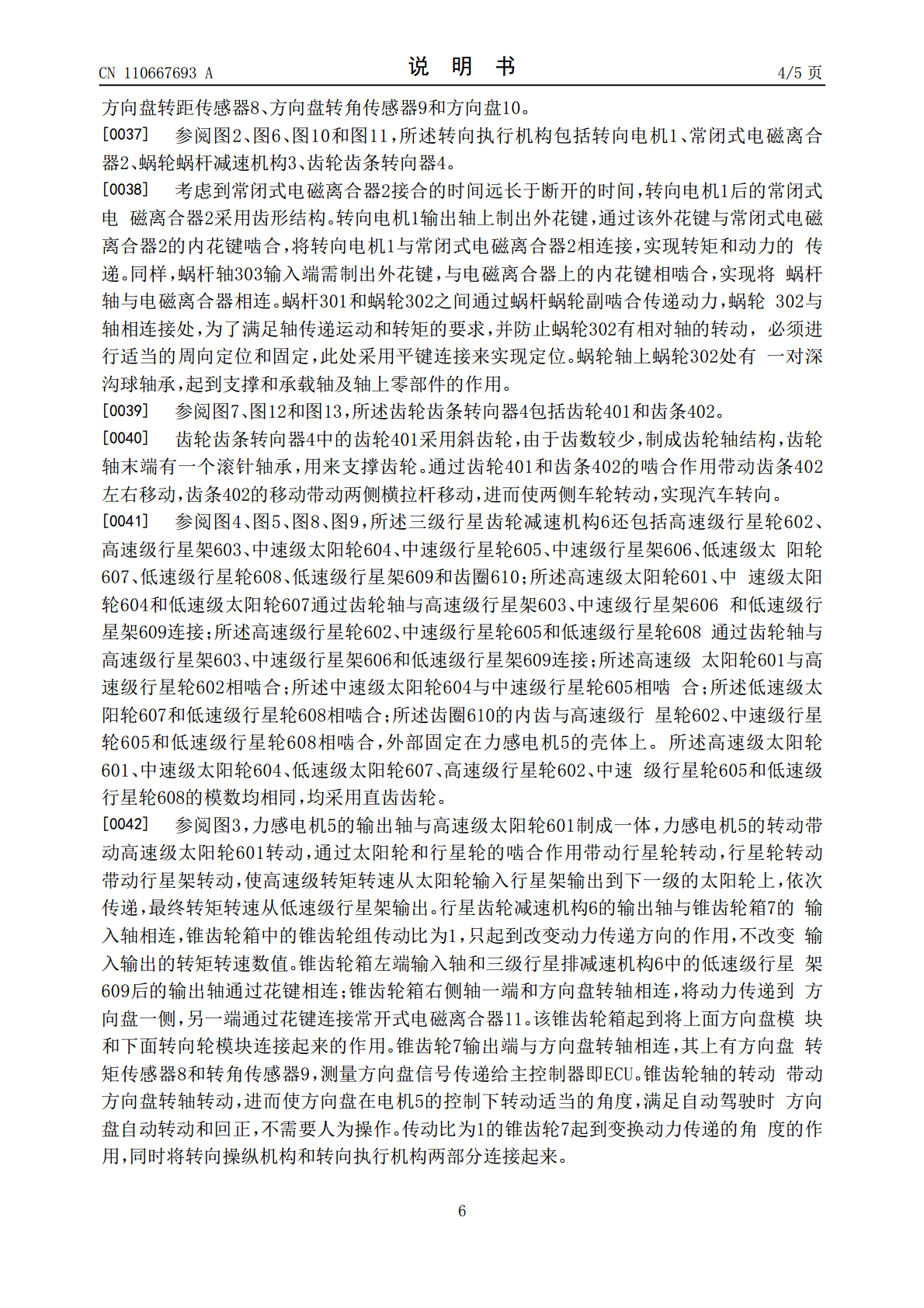
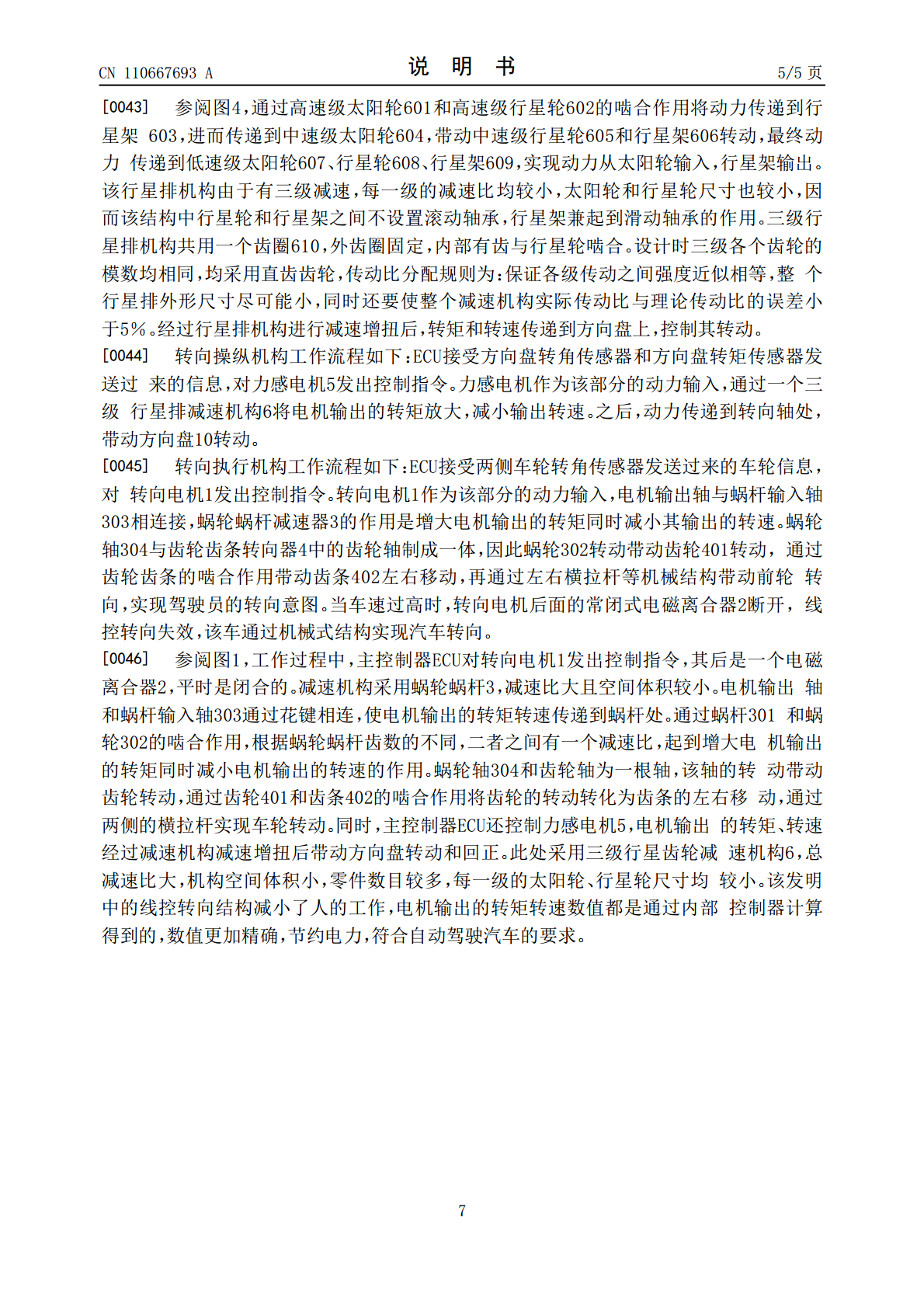
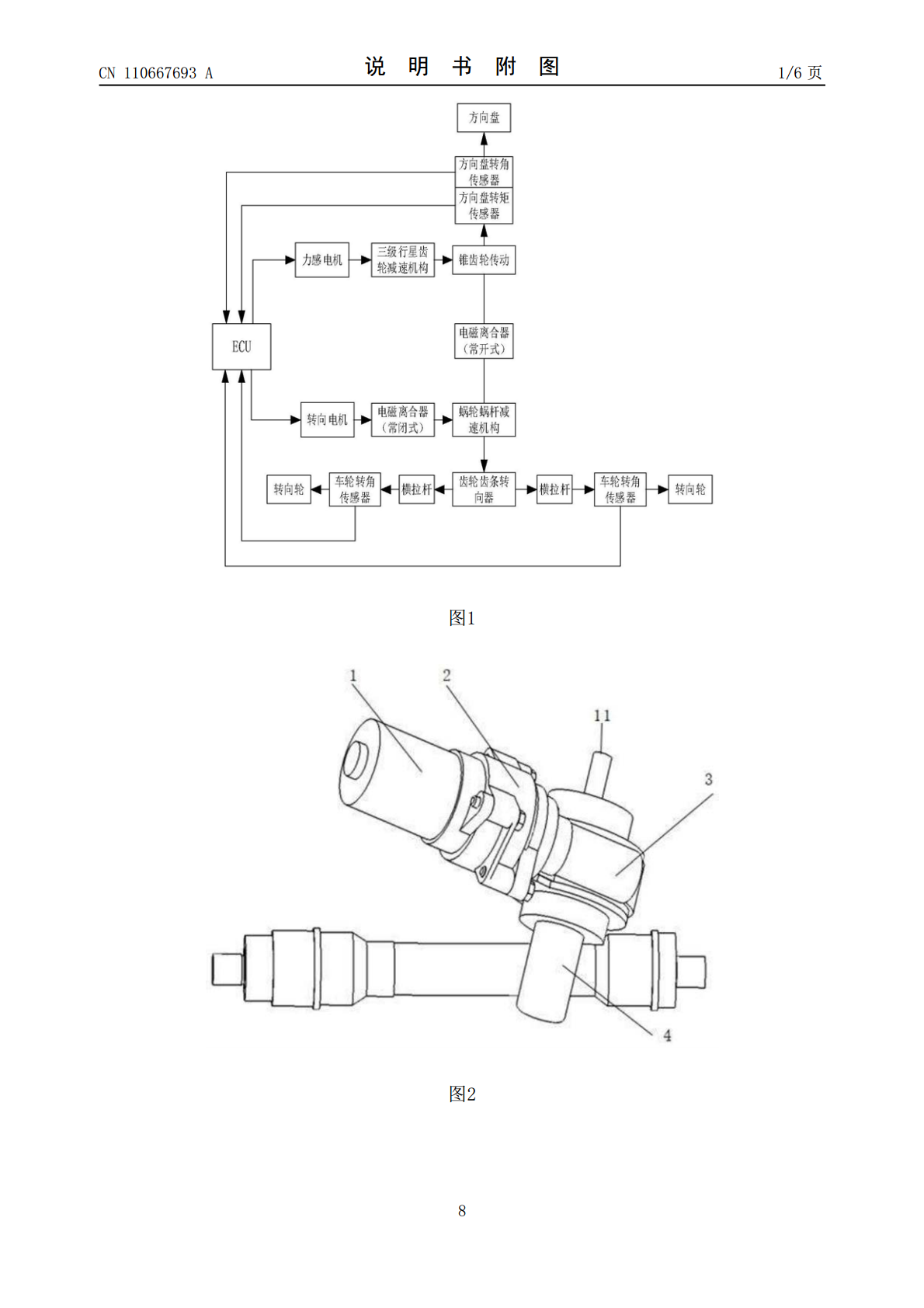
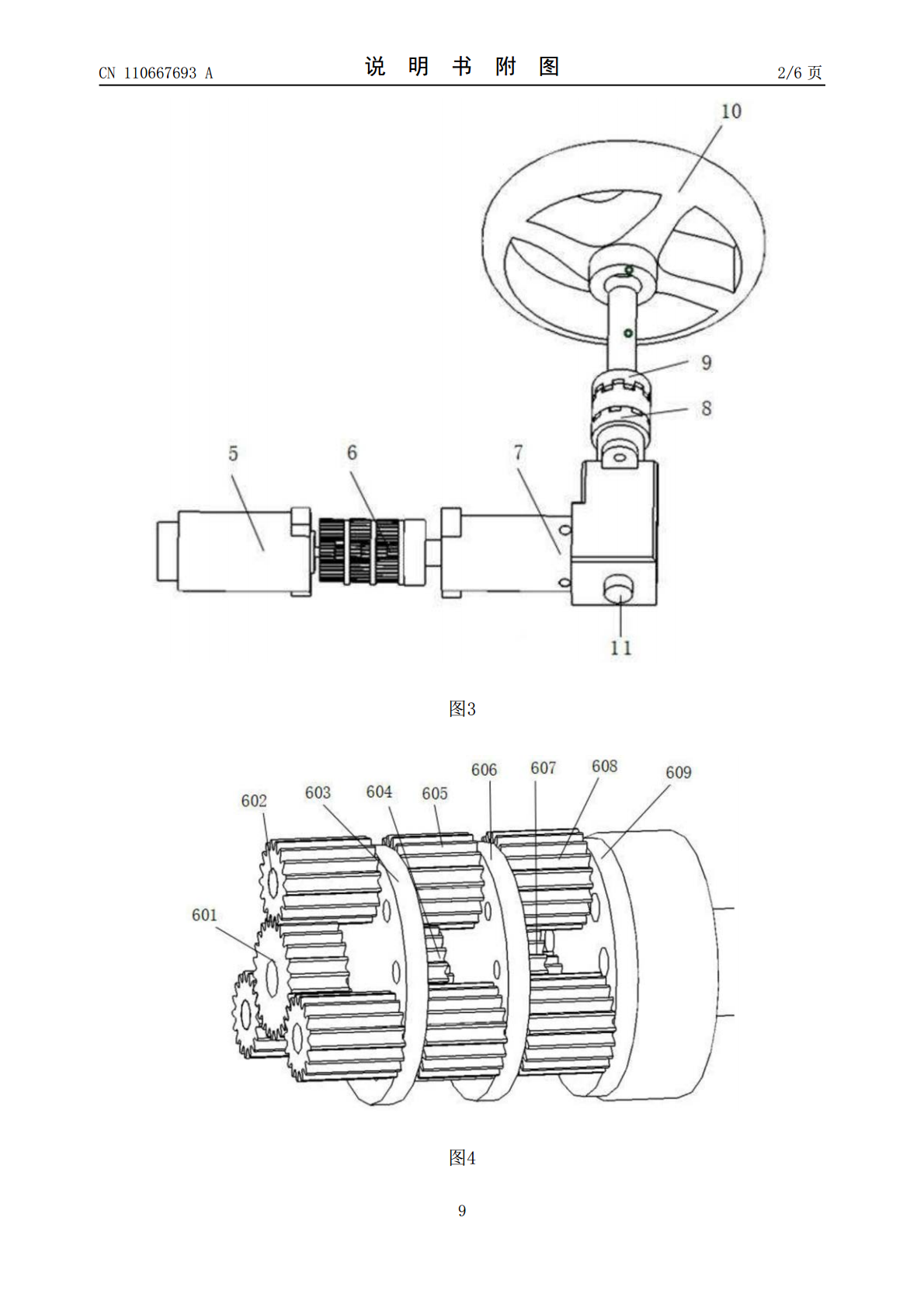
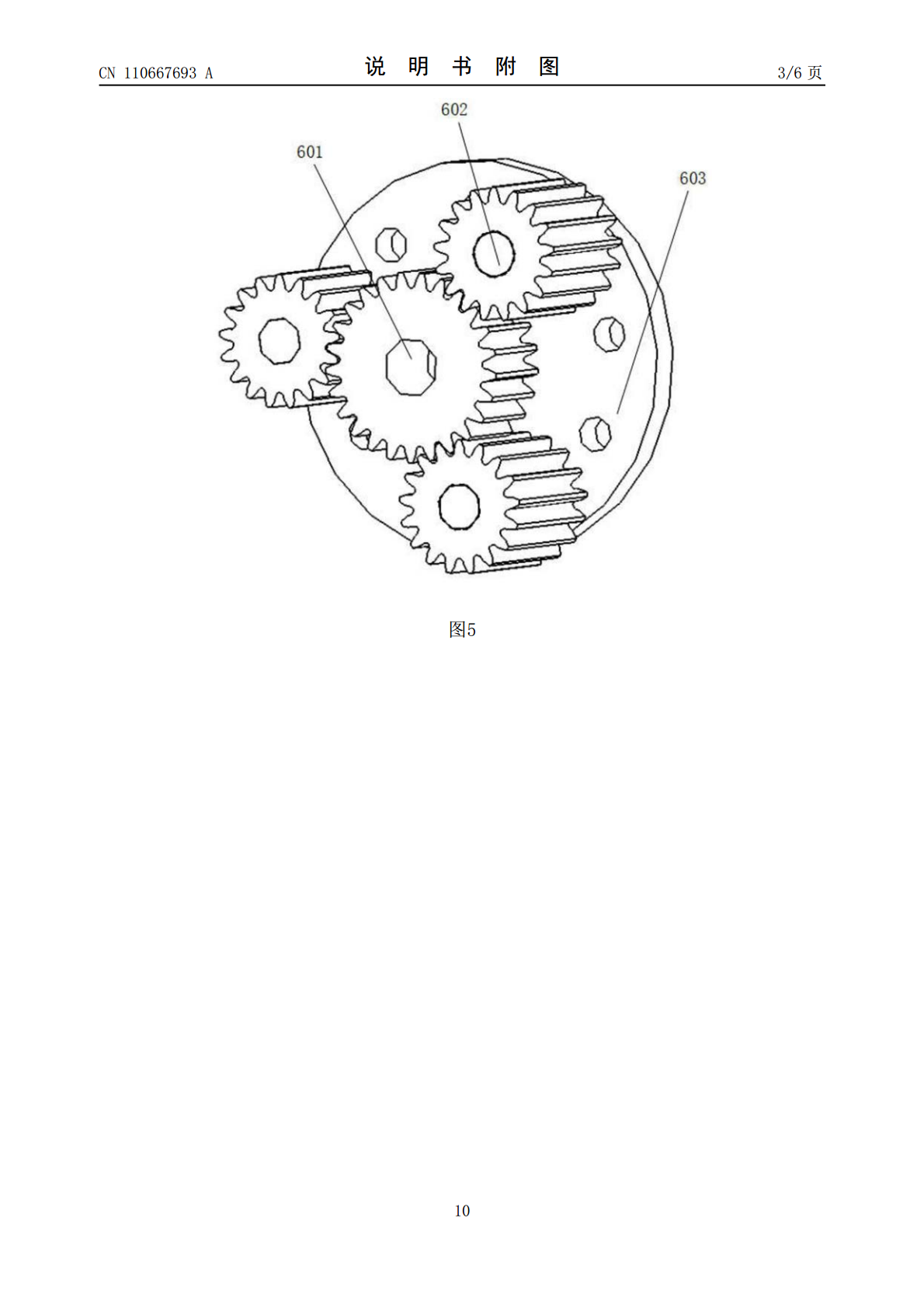
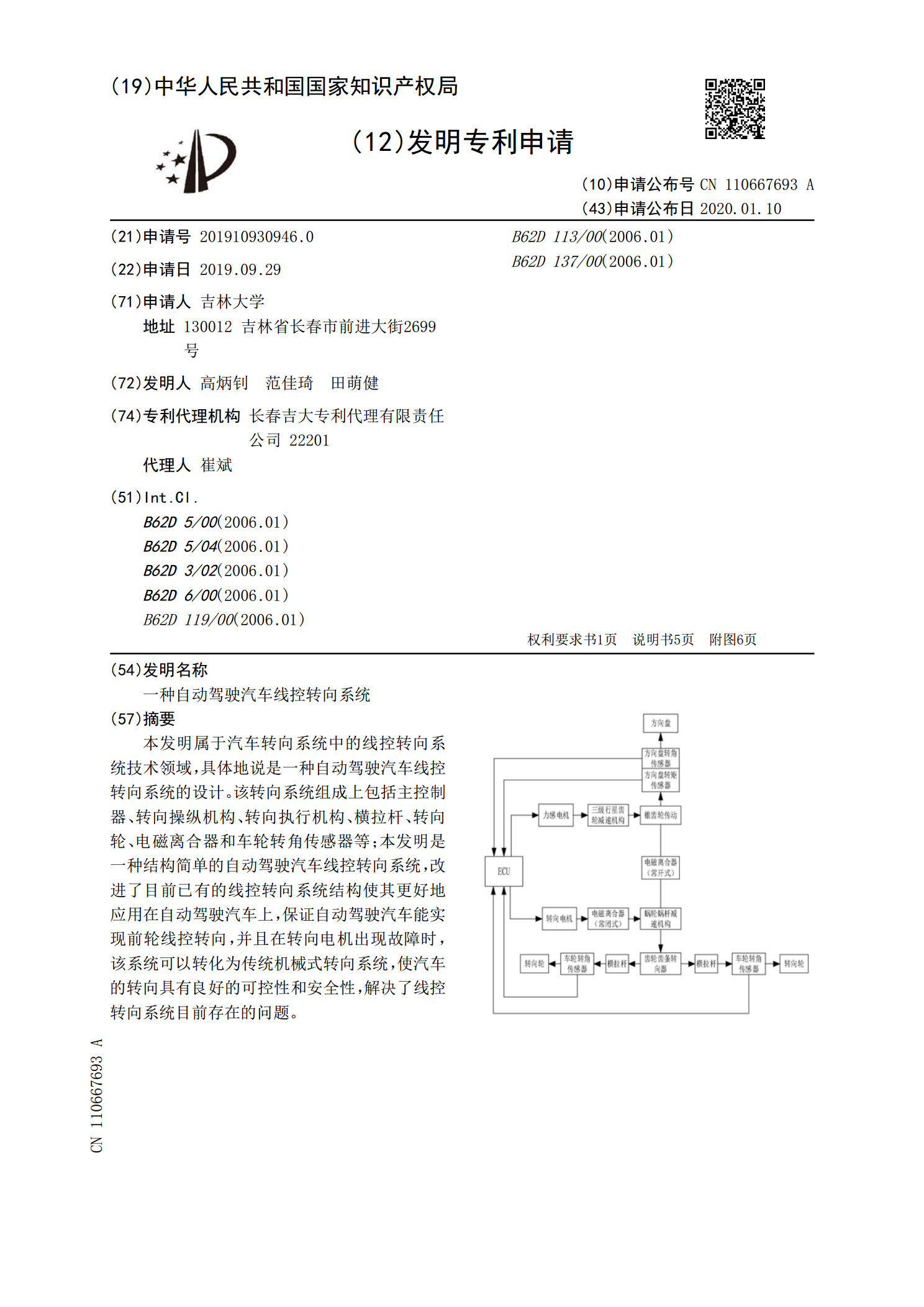
本发明属于汽车转向系统中的线控转向系统技术领域,具体地说是一种自动驾驶汽车线控转向系统的设计。该转向系统组成上包括主控制器、转向操纵机构、转向执行机构、横拉杆、转向轮、电磁离合器和车轮转角传感器等;本发明是一种结构简单的自动驾驶汽车线控转向系统,改进了目前已有的线控转向系统结构使其更好地应用在自动驾驶汽车上,保证自动驾驶汽车能实现前轮线控转向,并且在转向电机出现故障时,该系统可以转化为传统机械式转向系统,使汽车的转向具有良好的可控性和安全性,解决了线控转向系统目前存在的问题。

汽车线控转向系统.pdf
本发明涉及一种汽车线控转向系统,包括活塞、转向系统ECU、转角传感器、力矩电机、离合控制器、小齿轮和转向电机;所述的活塞的一端与左拉杆连接,另一端与转向电机连接;所述的转角传感器和力矩电机分别设置于转向管柱上,同时转向管柱的下端与中间轴连接;所述的中间轴通过万向节叉上的花键与离合控制器连接;所述的离合控制器的下端设有小齿轮;所述的转向电机的输入轴与活塞连接。本发明通过电控与传统机械式巧妙结合的方式,保证了在电子部件出现故障后,系统仍能实现其最基本的转向功能,提高了整个转向系统的可靠性;另外,本发明还在可靠

汽车线控转向系统转向控制研究.docx
汽车线控转向系统转向控制研究随着汽车整体科技水平的不断提高,汽车的各种功能和系统也在不断更新和升级。其中,汽车线控转向系统是汽车中非常重要的一个系统之一,可以让驾驶者更加方便地控制车辆行驶方向,提高驾驶安全性和驾驶体验。本文将围绕该主题展开深入讨论,并探讨其发展现状以及未来的发展趋势。一、汽车线控转向系统概述汽车线控转向系统(Steer-by-wire,简称SBW)是一种新型的汽车驾驶系统,也称为电子控制系统或电子转向系统。它主要通过电子信号来控制车辆的方向盘转动,从而实现对汽车的转向控制。相比传统的液压

线控转向系统转向柱限位装置以及线控转向型汽车.pdf
本发明提供了一种线控转向系统转向柱限位装置以及一种安装有线控转向系统转向柱限位装置的线控转向型汽车,在本发明中,该线控转向系统转向柱限位装置包括有联动齿轮以及限位齿轮,联动齿轮能够随方向盘转向柱轴联动,限位齿轮上具有止步齿,联动齿轮与限位齿轮啮合,当旋转至止步齿时,限位齿轮卡住实现对方向盘转向柱轴的转动止步。通过对联动齿轮以及限位齿轮的结构设计,主要是齿轮间传动比的设计,能够实现方向盘的旋转限位,本发明彻底解决了线控转向系统方向盘容易出现转角超量程而存在的转向系统运行可靠性较低的问题。

一种基于线控的汽车转向系统.pdf
本发明公开了一种基于线控的汽车转向系统,包括:信号采集部分、控制单元部分以及机械执行部分,其特征在于:信号采集部分采集方向盘的转向信号、扭矩信号、车轮的角度信号、整车的车速信号、加速度信号以及侧向角速度信号,传送到控制单元部分,由控制单元进行分析判断,输出控制信号控制机械执行部分的动作。本发明采用双电机控制,上位电机实现路感的真实模拟,下位电机可以实现转向动作的完成。由于转向和执行之间取消机械连接,使各自成为模块化产品,便于系统的升级和装配;从而也提高了汽车转向系统的安全系数。