
基于双目视觉的无人机飞行高度测量方法研究.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于双目视觉的无人机飞行高度测量方法研究.pptx
汇报人:CONTENTS添加章节标题双目视觉原理立体视觉原理双目视觉系统组成双目视觉的关键技术双目视觉的应用领域无人机飞行高度测量方法传统测量方法基于GPS的测量方法基于激光雷达的测量方法基于双目视觉的测量方法基于双目视觉的无人机飞行高度测量系统设计系统硬件组成摄像头的选择与安装双目视觉算法实现飞行高度测量流程实验验证与结果分析实验环境与设备实验过程与数据采集实验结果分析结果比较与误差分析结论与展望研究结论研究不足与展望汇报人:

基于双目视觉的信号弹飞行高度轨迹测量.pptx
汇报人:目录PARTONEPARTTWO立体视觉基本原理双目视觉测量原理信号弹飞行高度轨迹测量的可行性测量系统设计PARTTHREE摄像机选型与安装图像采集卡计算机硬件配置测量系统标定PARTFOUR图像预处理特征提取立体匹配三维重建飞行高度轨迹计算PARTFIVE实验条件与过程实验结果展示结果误差分析精度评估与改进PARTSIX在军事领域的应用在民用领域的应用技术发展与展望THANKYOU
基于双目视觉的无人机编队飞行方法和系统.pdf
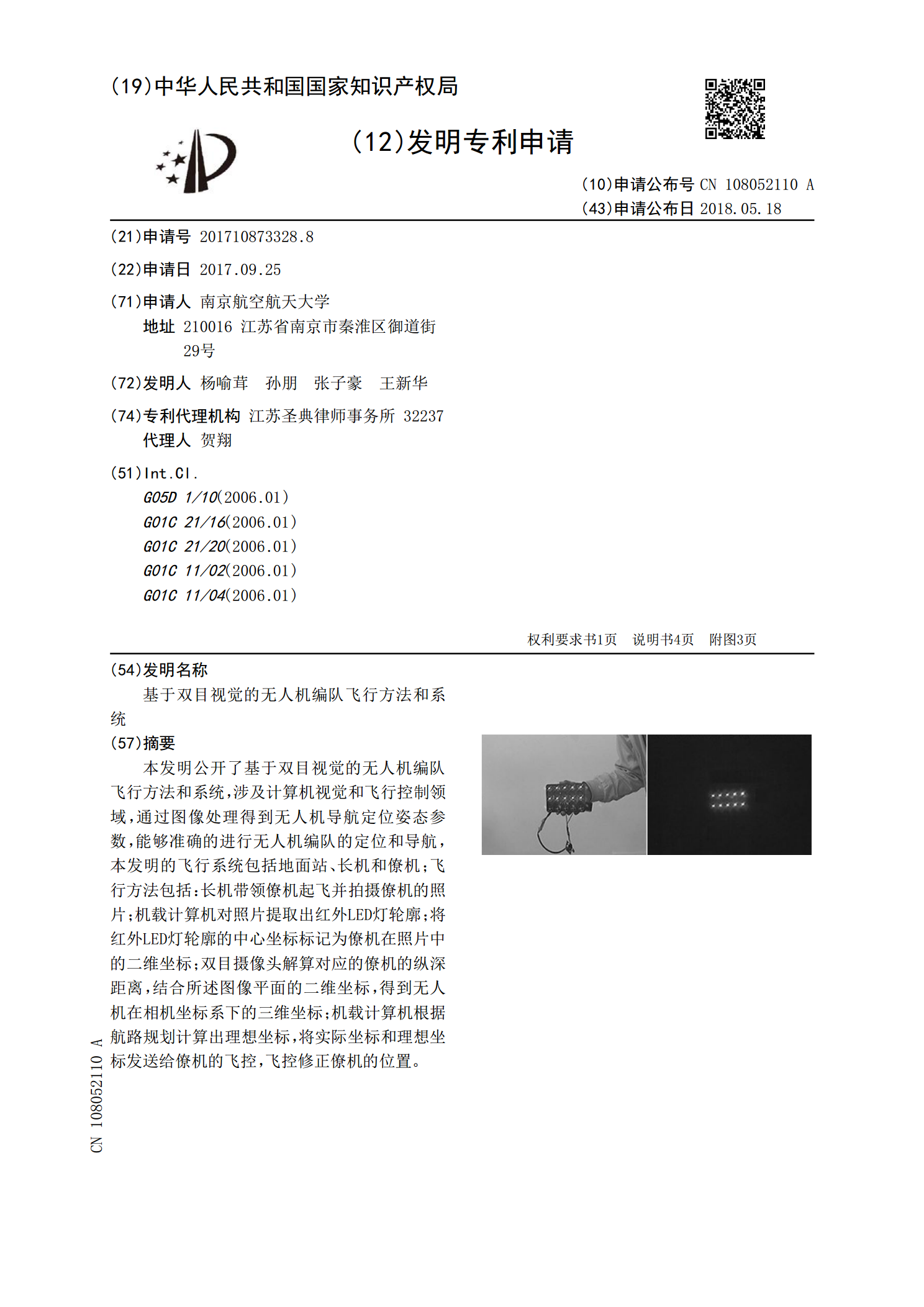
本发明公开了基于双目视觉的无人机编队飞行方法和系统,涉及计算机视觉和飞行控制领域,通过图像处理得到无人机导航定位姿态参数,能够准确的进行无人机编队的定位和导航,本发明的飞行系统包括地面站、长机和僚机;飞行方法包括:长机带领僚机起飞并拍摄僚机的照片;机载计算机对照片提取出红外LED灯轮廓;将红外LED灯轮廓的中心坐标标记为僚机在照片中的二维坐标;双目摄像头解算对应的僚机的纵深距离,结合所述图像平面的二维坐标,得到无人机在相机坐标系下的三维坐标;机载计算机根据航路规划计算出理想坐标,将实际坐标和理想坐标发送给

基于双目视觉的无人机和电力杆塔距离测量方法.pdf
本发明涉及一种基于双目视觉的无人机和电力杆塔距离测量方法,包括以下步骤:步骤S1:采用双目视觉摄像机,获取电力杆塔的图片;步骤S2:基于YOLACT算法对双目视觉摄像机拍摄到的电力杆塔图像进行实例分割,获得分割后的电力杆塔图像;步骤S3:通过SURF特征匹配方法对左右双目分割出的同一电力杆塔图像进行特征匹配,获得精确的特征点对;步骤S4:根据三角测距以及双目视觉中视差与深度的关系推出精确的深度图,进一步测算出无人机与电力杆塔之间的距离。本发明能精准测量无人机与电力杆塔之间的距离,保障无人机巡检期间机体的安

基于双目视觉的无人机室内定位研究.docx
基于双目视觉的无人机室内定位研究基于双目视觉的无人机室内定位研究摘要:随着无人机的不断发展与应用,无人机室内定位成为一个备受关注的研究领域。传统的GPS等定位系统在室内环境下往往无法提供准确的定位信息。因此,基于双目视觉的无人机室内定位技术应运而生。本论文旨在通过对基于双目视觉的无人机室内定位技术进行综述,并对其优缺点进行分析和讨论,为后续研究提供参考。关键词:无人机、室内定位、双目视觉、定位精度、优缺点1.序言无人机的广泛应用促使人们对其室内定位技术的需求。然而,室内环境的复杂性使得传统的定位系统在此场