
基于双目立体视觉和无人机的秸秆焚烧监测方法.pdf

雨巷****轶丽


1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于双目立体视觉和无人机的秸秆焚烧监测方法.pdf
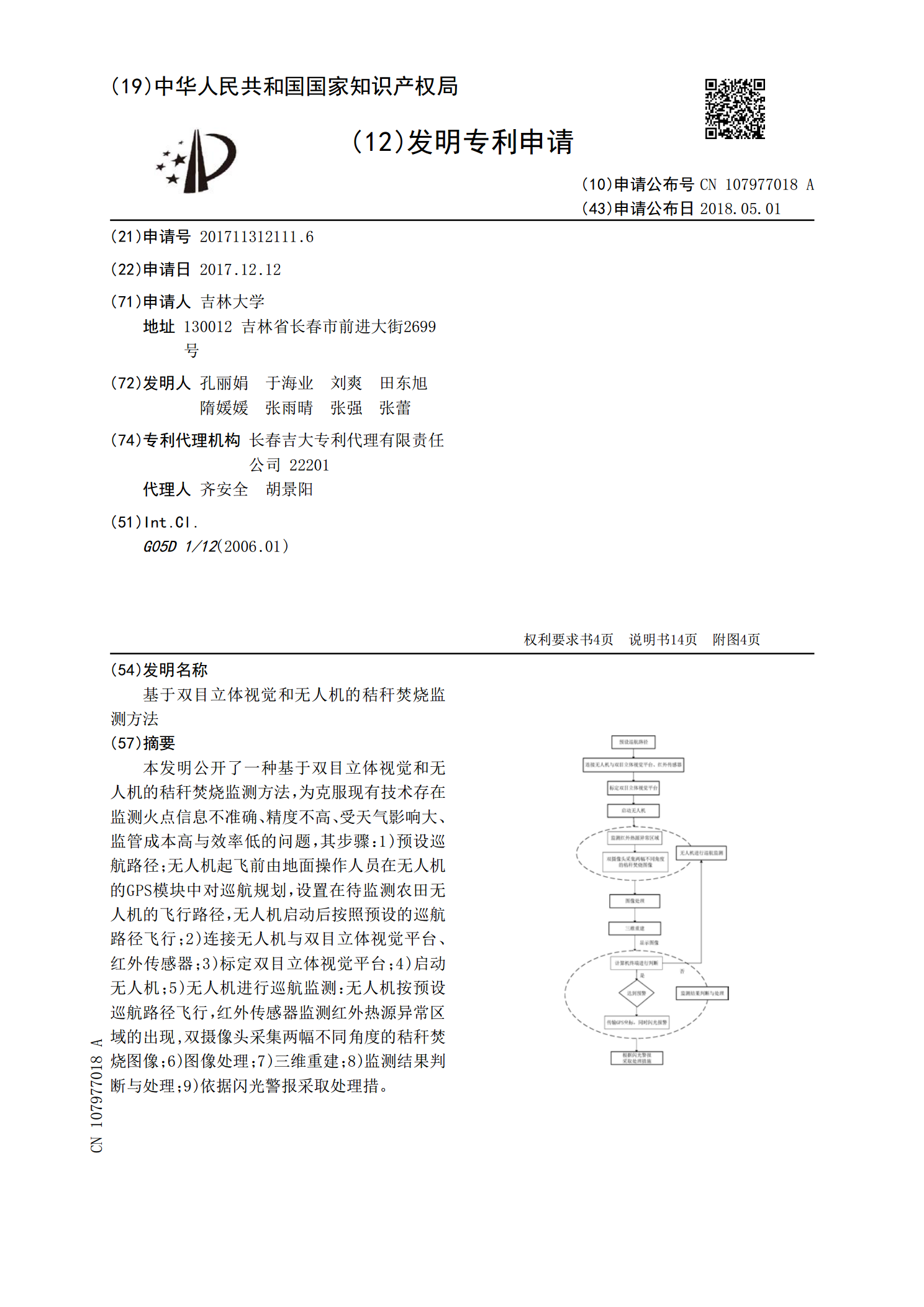
本发明公开了一种基于双目立体视觉和无人机的秸秆焚烧监测方法,为克服现有技术存在监测火点信息不准确、精度不高、受天气影响大、监管成本高与效率低的问题,其步骤:1)预设巡航路径;无人机起飞前由地面操作人员在无人机的GPS模块中对巡航规划,设置在待监测农田无人机的飞行路径,无人机启动后按照预设的巡航路径飞行;2)连接无人机与双目立体视觉平台、红外传感器;3)标定双目立体视觉平台;4)启动无人机;5)无人机进行巡航监测:无人机按预设巡航路径飞行,红外传感器监测红外热源异常区域的出现,双摄像头采集两幅不同角度的秸秆
基于双目视觉的无人机水文监测自主避障系统和方法.pdf
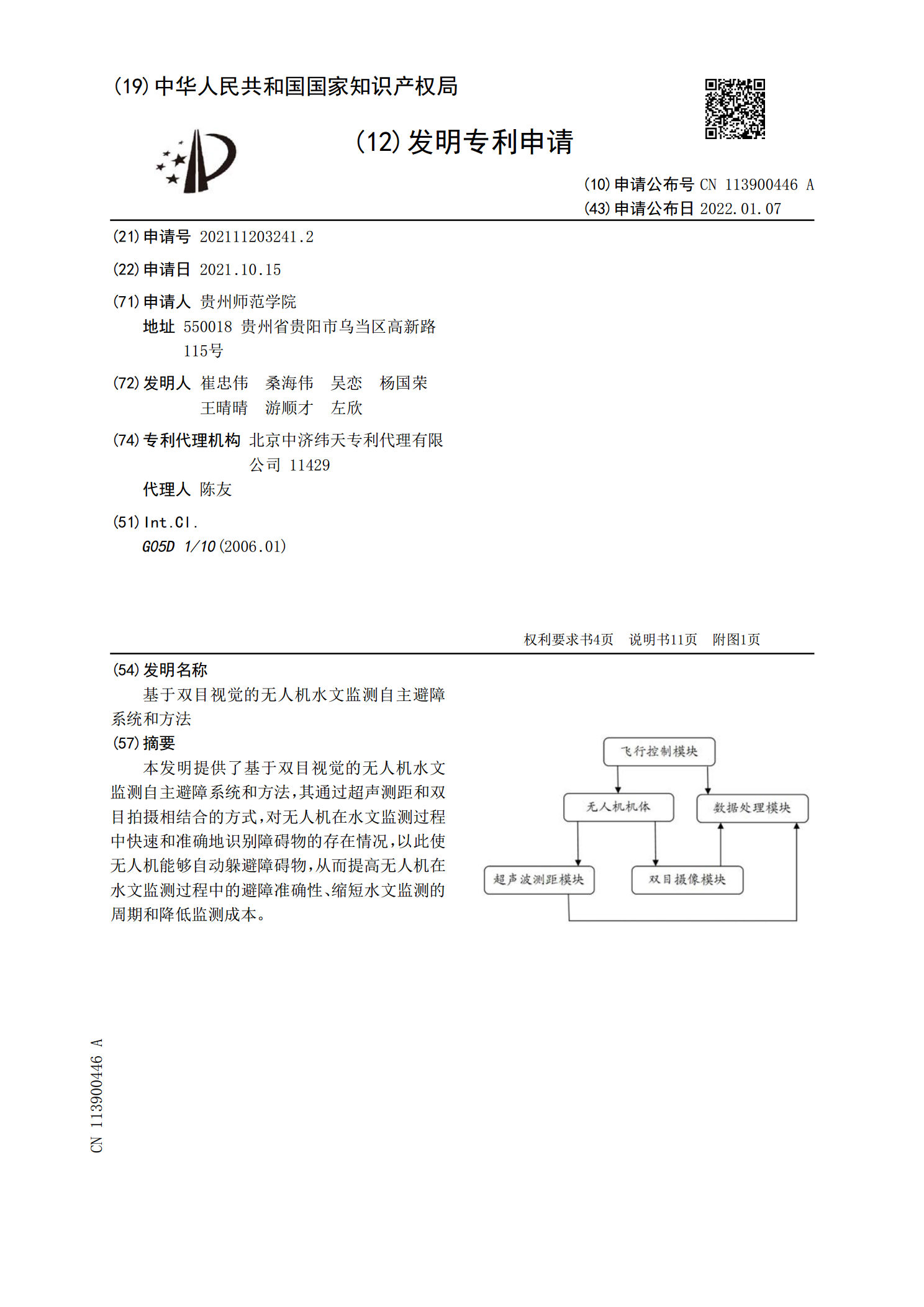
本发明提供了基于双目视觉的无人机水文监测自主避障系统和方法,其通过超声测距和双目拍摄相结合的方式,对无人机在水文监测过程中快速和准确地识别障碍物的存在情况,以此使无人机能够自动躲避障碍物,从而提高无人机在水文监测过程中的避障准确性、缩短水文监测的周期和降低监测成本。

基于双目立体视觉的植株生长状态无损监测方法的研究.docx
基于双目立体视觉的植株生长状态无损监测方法的研究植株生长状态的监测是现代农业中非常重要的环节,在精细化农业中具有重要的应用价值。利用传统的测量方法如手工测量容易出现误差较大、效率低下等问题。双目立体视觉技术是一种新兴、全自动的3D测量技术,可以对植株生长状态进行高效、无损监测。本文主要研究基于双目立体视觉的植株生长状态无损监测方法。一、研究背景概述植株生长状态对于植物的生长发育具有重要的影响,对植物的生长周期和品质有决定性的影响。同时,精细化农业发展也对植株生长状态提出了更为严格的要求,传统的测量方式已无
基于双目视觉的无人机编队飞行方法和系统.pdf
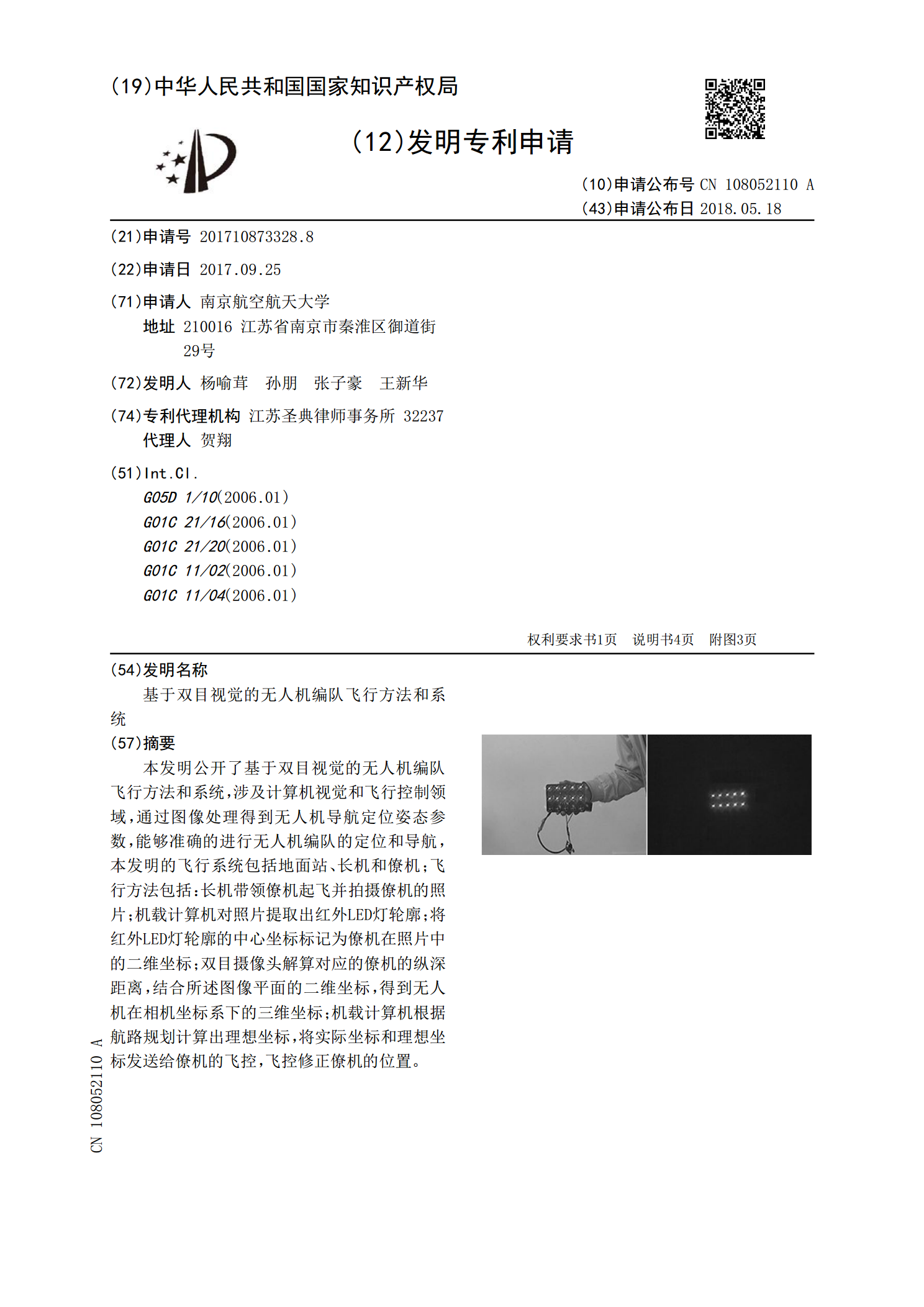
本发明公开了基于双目视觉的无人机编队飞行方法和系统,涉及计算机视觉和飞行控制领域,通过图像处理得到无人机导航定位姿态参数,能够准确的进行无人机编队的定位和导航,本发明的飞行系统包括地面站、长机和僚机;飞行方法包括:长机带领僚机起飞并拍摄僚机的照片;机载计算机对照片提取出红外LED灯轮廓;将红外LED灯轮廓的中心坐标标记为僚机在照片中的二维坐标;双目摄像头解算对应的僚机的纵深距离,结合所述图像平面的二维坐标,得到无人机在相机坐标系下的三维坐标;机载计算机根据航路规划计算出理想坐标,将实际坐标和理想坐标发送给

基于双目立体视觉的隧道围岩形变监测系统.docx
基于双目立体视觉的隧道围岩形变监测系统摘要:双目立体视觉技术是一种重要的非接触式三维测量技术,具有高精度、快速、可靠等特点。本文研究的双目立体视觉的隧道围岩形变监测系统,可以对隧道围岩的变形进行实时监测和分析,为隧道建设提供重要的技术支持。本文首先介绍了双目立体视觉技术的原理和特点,其次讨论了隧道围岩形变监测系统的构成和实现方法,最后通过对实验结果的分析,证明了本系统的可行性和实用性。关键词:双目立体视觉、隧道围岩、形变监测、系统设计1.引言隧道是人类在地下施工的重要工程,其建设过程中,围岩的稳定性是至关