
玻璃圆角自动定位切割装置及其方法.pdf

岚风****55


1/9
2/9

3/9
4/9
5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
玻璃圆角自动定位切割装置及其方法.pdf
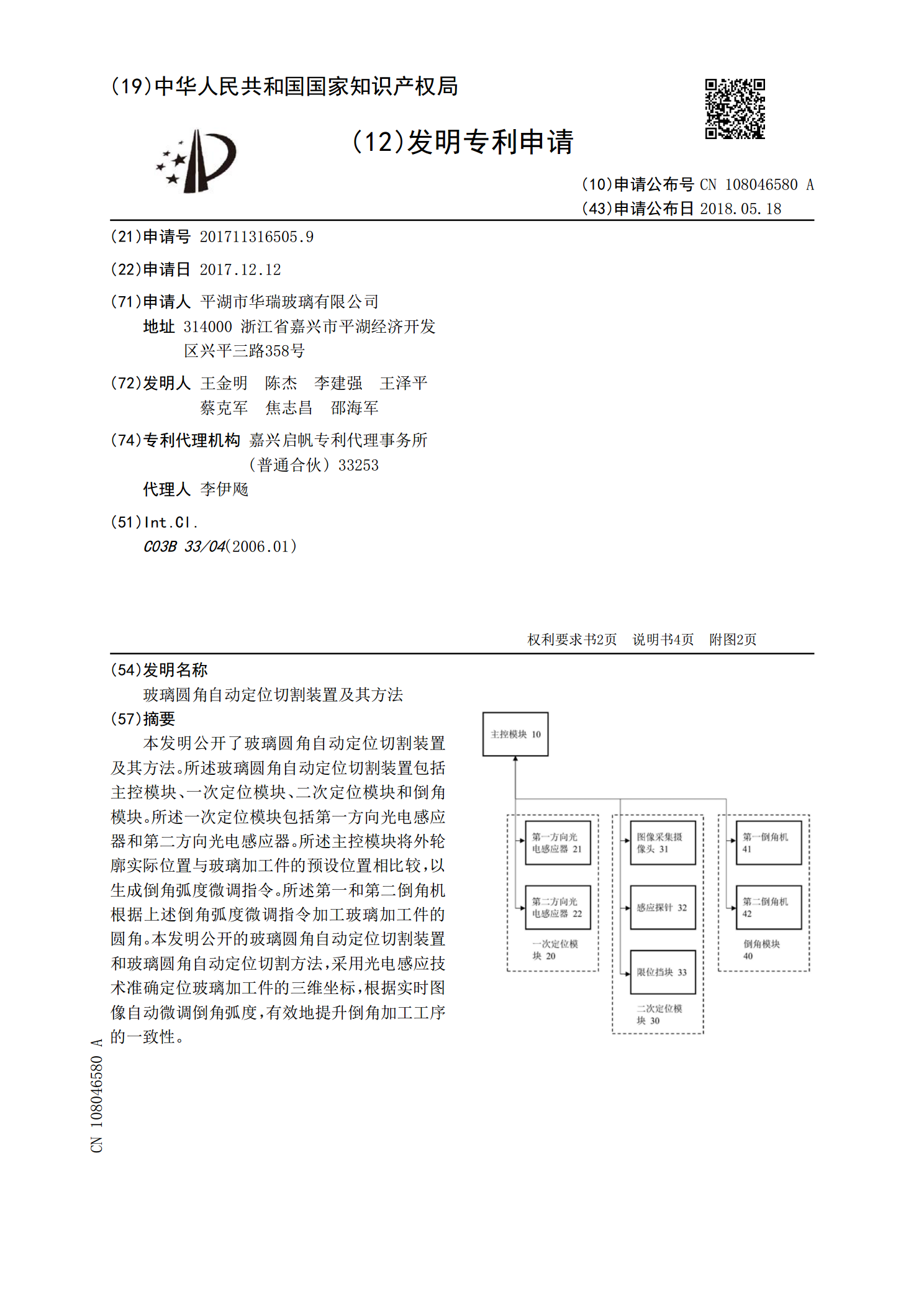
本发明公开了玻璃圆角自动定位切割装置及其方法。所述玻璃圆角自动定位切割装置包括主控模块、一次定位模块、二次定位模块和倒角模块。所述一次定位模块包括第一方向光电感应器和第二方向光电感应器。所述主控模块将外轮廓实际位置与玻璃加工件的预设位置相比较,以生成倒角弧度微调指令。所述第一和第二倒角机根据上述倒角弧度微调指令加工玻璃加工件的圆角。本发明公开的玻璃圆角自动定位切割装置和玻璃圆角自动定位切割方法,采用光电感应技术准确定位玻璃加工件的三维坐标,根据实时图像自动微调倒角弧度,有效地提升倒角加工工序的一致性。
玻璃切割装置及其方法.pdf
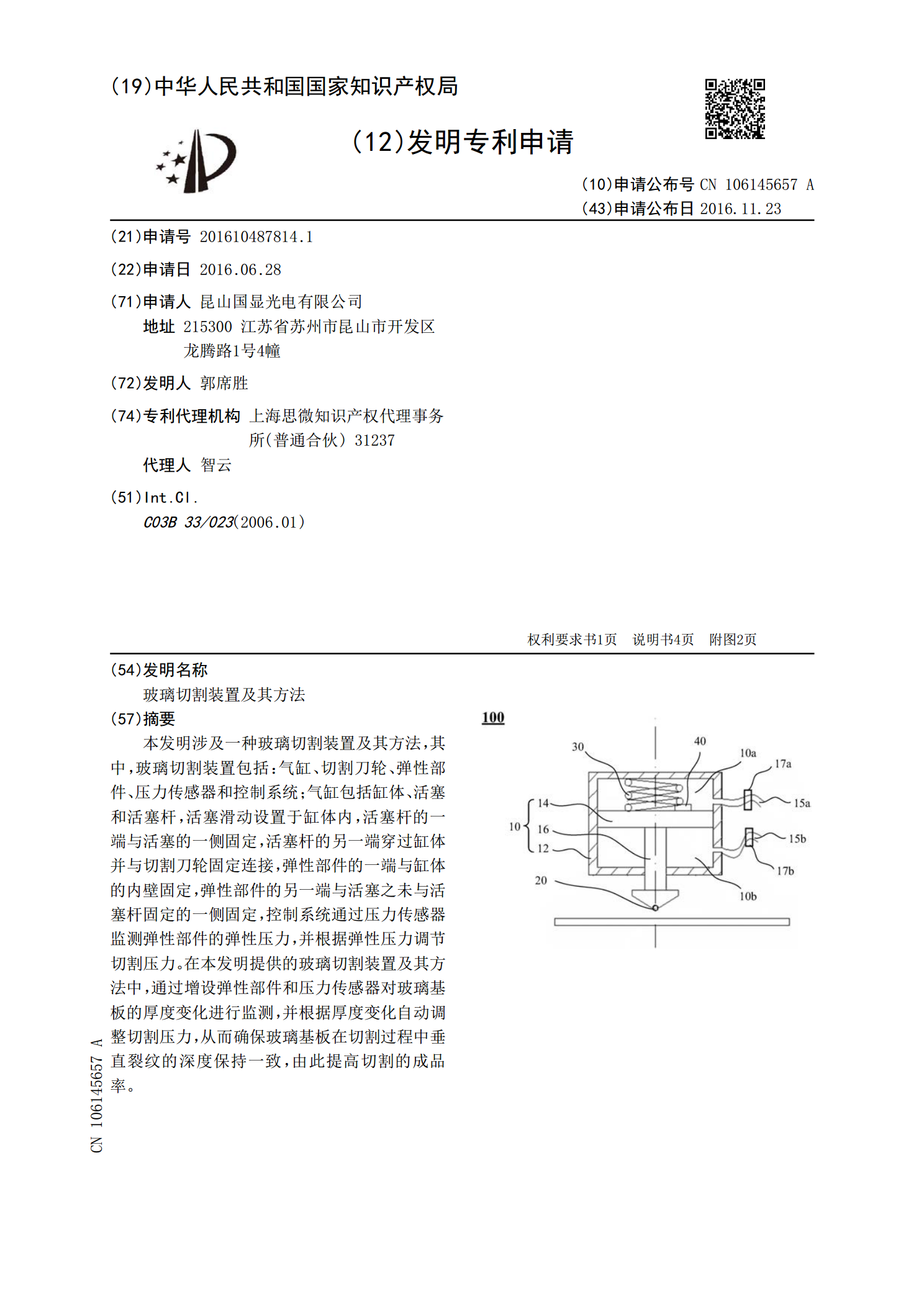
本发明涉及一种玻璃切割装置及其方法,其中,玻璃切割装置包括:气缸、切割刀轮、弹性部件、压力传感器和控制系统;气缸包括缸体、活塞和活塞杆,活塞滑动设置于缸体内,活塞杆的一端与活塞的一侧固定,活塞杆的另一端穿过缸体并与切割刀轮固定连接,弹性部件的一端与缸体的内壁固定,弹性部件的另一端与活塞之未与活塞杆固定的一侧固定,控制系统通过压力传感器监测弹性部件的弹性压力,并根据弹性压力调节切割压力。在本发明提供的玻璃切割装置及其方法中,通过增设弹性部件和压力传感器对玻璃基板的厚度变化进行监测,并根据厚度变化自动调整切割

平板玻璃离线切割机的玻璃板定位装置及其定位方法.pdf
平板玻璃离线切割机的玻璃板定位装置及其定位方法,在所述的切割机气浮平台的表面沿水平方向和竖直方向分别固定安装水平向固定块和竖直向固定块,实现了不留掰边切割需要切割的玻璃板的操作,这样不必每次费时费力地确定工件原点,操作变得简单容易,且该装置和定位方法简单,节省玻璃用料并且简化了切割工艺。

用于切割玻璃的装置及其方法.pdf
本发明涉及用于切割玻璃的装置及其方法,CO2激光器的输出端设置有扩束镜,扩束镜的输出端布置有45度全反射镜,45度全反射镜的输出端布置有聚焦镜,聚焦镜正对于加工平台。用于切割玻璃时,通过球形刀轮在玻璃断裂位置始端初切一个应力源点;聚焦的激光束在玻璃表面形成一个应力破裂带,切割的轮廓线是一个矩形光斑沿着刀轮初切点组成的切割道;冷却介质沿着激光划线的方向喷洒,使应力沿着激光划线切割道发展;通过裂片装置将玻璃沿着激光划线的切割道断裂。实现玻璃正幅面裂断加工,得到符合高精度加工要求尺寸的、边缘质量较好的不同厚度电

浮法玻璃切割机的全自动润滑装置及其方法.pdf
一种浮法玻璃切割机的全自动润滑方法,包括以下步骤:(a)利用气动隔膜泵将低处的润滑油打入高处的油箱中,再利用重力滴油润滑;(b)油箱内上、下极限位置分别安装液位计,利用液位计的反馈信号,控制气动隔膜泵的通断,实现润滑油箱的自动循环补给;并且(c)润滑油路设计成局部并联回路。根据本发明的全自动润滑方法,实现了浮法玻璃切割机的全自动润滑,整个润滑回路不需要人工干预,稳定可靠。刀轮处滴下的润滑油连续均匀,大小可调,有效地保护了刀轮,同时提高了玻璃掰断后的合格品率和优良品率。