
一种基于视场匹配的单目深度相机及其对物体形貌的检测方法.pdf

代瑶****zy

1/9

2/9

3/9

4/9
5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于视场匹配的单目深度相机及其对物体形貌的检测方法.pdf
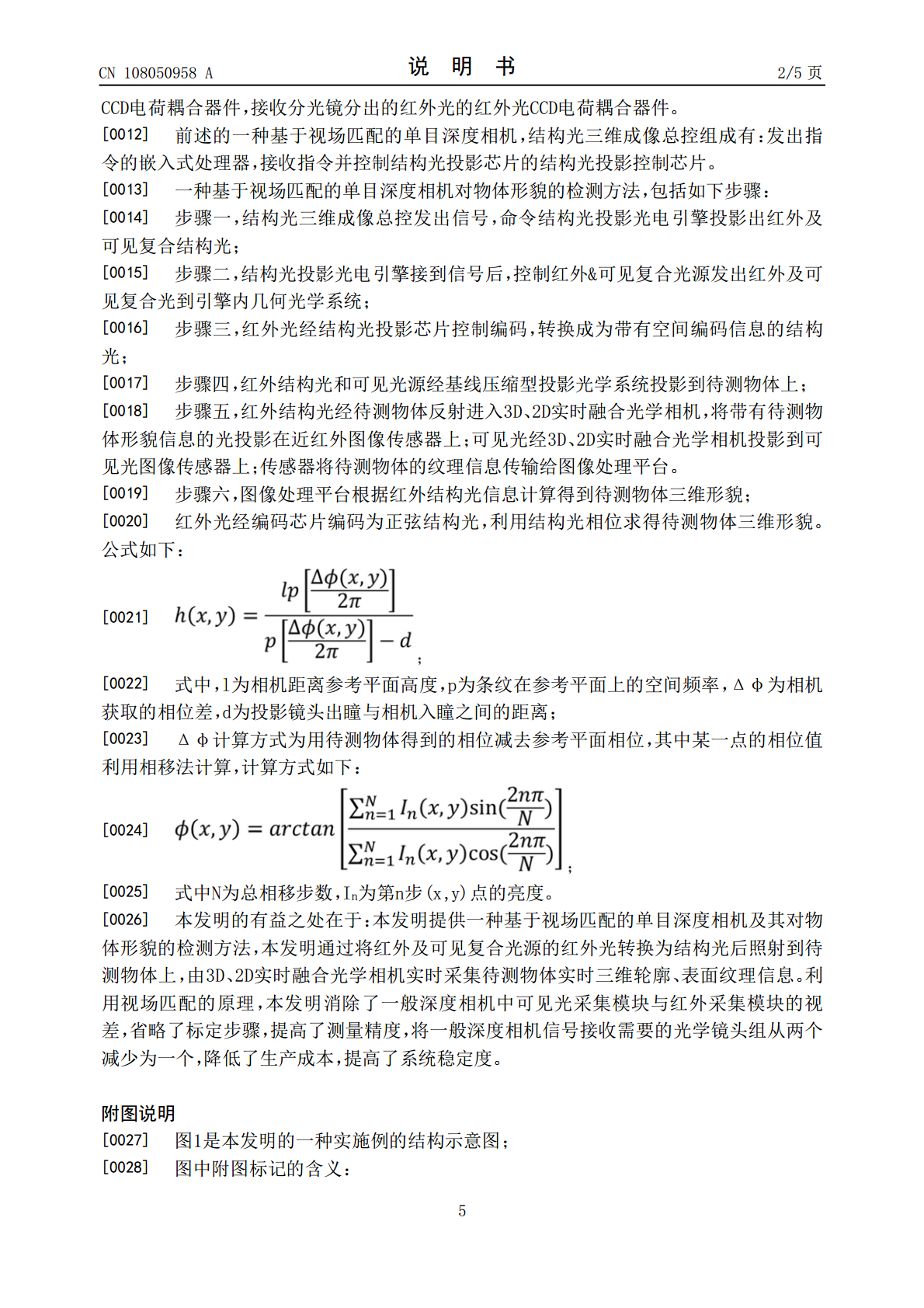
本发明公开了一种基于视场匹配的单目深度相机及其对物体形貌的检测方法,单目深度相机,包括:红外及可见复合光源,对结构光进行编码并投影到待测物体上的结构光投影光电引擎,采集待测物体表面的纹理信息的3D、2D实时融合光学相机,接收3D、2D实时融合光学相机信息的近红外图像传感器、可见光图像传感器,接收近红外图像传感器、可见光图像传感器的信号并得到得到待测物体的三维轮廓以及纹理信息的结构光三维成像总控。本发明消除了一般深度相机中可见光采集模块与红外采集模块的视差,省略了标定步骤,提高了测量精度,将一般深度相机信号
一种基于深度学习和单目大视场平面测量的定位检测方法.pdf
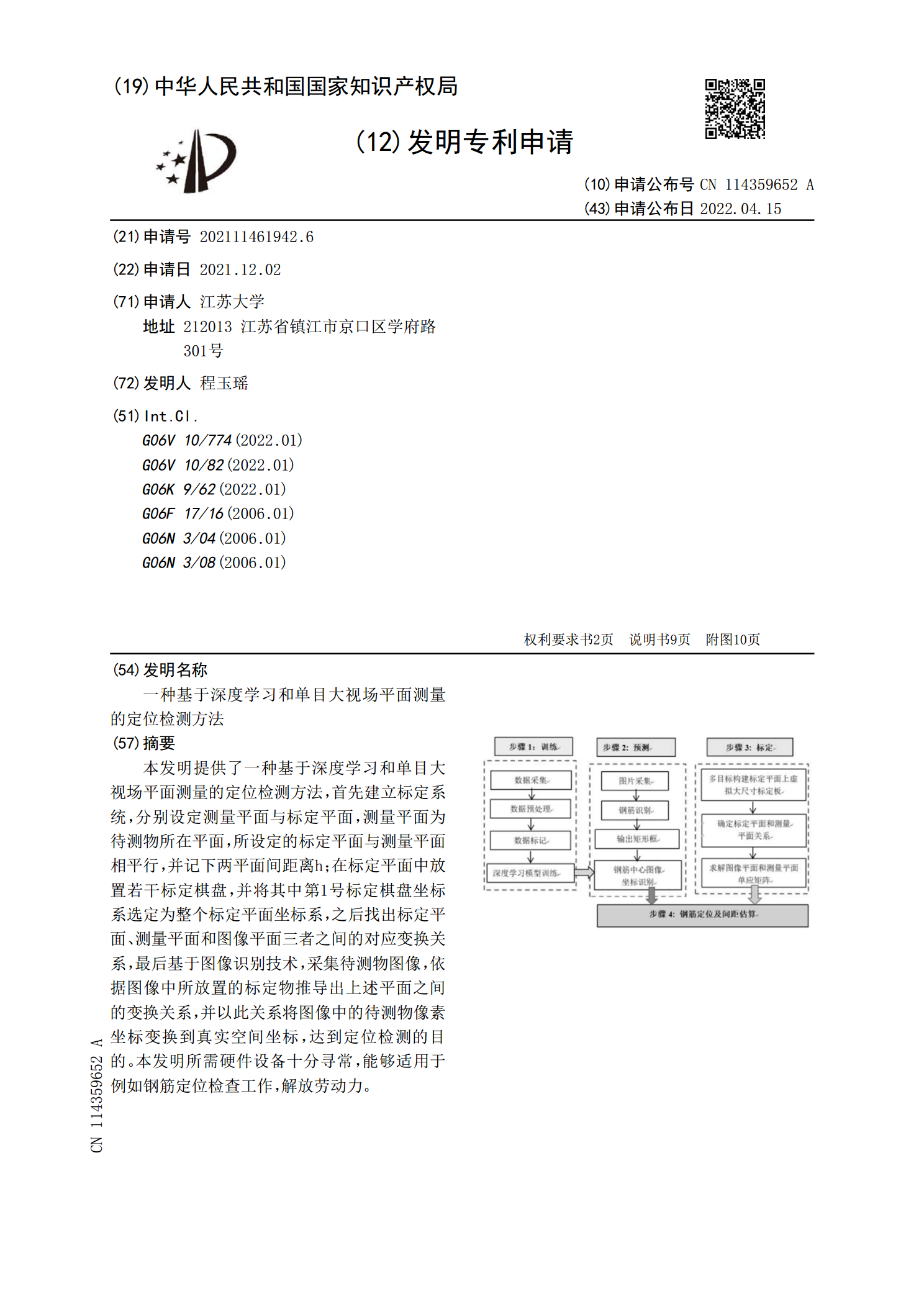
本发明提供了一种基于深度学习和单目大视场平面测量的定位检测方法,首先建立标定系统,分别设定测量平面与标定平面,测量平面为待测物所在平面,所设定的标定平面与测量平面相平行,并记下两平面间距离h;在标定平面中放置若干标定棋盘,并将其中第1号标定棋盘坐标系选定为整个标定平面坐标系,之后找出标定平面、测量平面和图像平面三者之间的对应变换关系,最后基于图像识别技术,采集待测物图像,依据图像中所放置的标定物推导出上述平面之间的变换关系,并以此关系将图像中的待测物像素坐标变换到真实空间坐标,达到定位检测的目的。本发明所

基于单目相机的深度图生成装置及方法.pdf
本发明涉及基于单目相机的深度图生成装置,包含单目相机和RealSense相机;单目相机安装在第一云台上;RealSense相机安装在第二云台上;单目相机与RealSense相机紧密配合,光轴平行。本发明还涉及基于单目相机的深度图生成方法,包含步骤:采集1张单目相机RGB图像;采集1张RealSense相机RGB图像和1张RealSense相机深度图;向下采样得到向下采样单目相机RGB图像;进行超像素分割操作,得到分割单目相机RGB图像;进行特征点匹配操作,得到匹配深度图;进行区域分割,得到分区深度图;统计

一种基于单目相机的AGV行人跟随方法.pdf
本发明涉及一种基于单目相机的AGV行人跟随方法,包括以下步骤:1)检测行人目标:根据部署在上位机的行人检测模型得到行人目标检测框;2)利用单目相机标定单应矩阵:获取三维世界坐标系到二维像素坐标系的单应矩阵H;3)行人坐标解算:计算三维世界坐标系下行人与地面接触点的坐标,即行人目标的世界坐标(x

基于单目双焦及SIFT特征匹配的深度估计方法.docx
基于单目双焦及SIFT特征匹配的深度估计方法摘要:深度估计在计算机视觉领域中具有十分重要的应用,例如三维重建、物体识别、姿态估计等。然而,深度图像获取方式有限,常见的RGB图像缺乏深度信息,因此需要从多个角度建立深度估计模型。本文介绍了一种基于单目双焦及SIFT特征匹配的深度估计方法,包括预处理、特征提取、深度估计和后处理等步骤。实验结果表明,本方法能够有效地提高深度估计的准确性和精度。关键词:深度估计;单目双焦;SIFT特征匹配;预处理;特征提取;后处理引言:深度估计是计算机视觉中的一个热门研究课题,其