
一种基于深度学习和单目大视场平面测量的定位检测方法.pdf

一条****发啊


1/10
2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于深度学习和单目大视场平面测量的定位检测方法.pdf
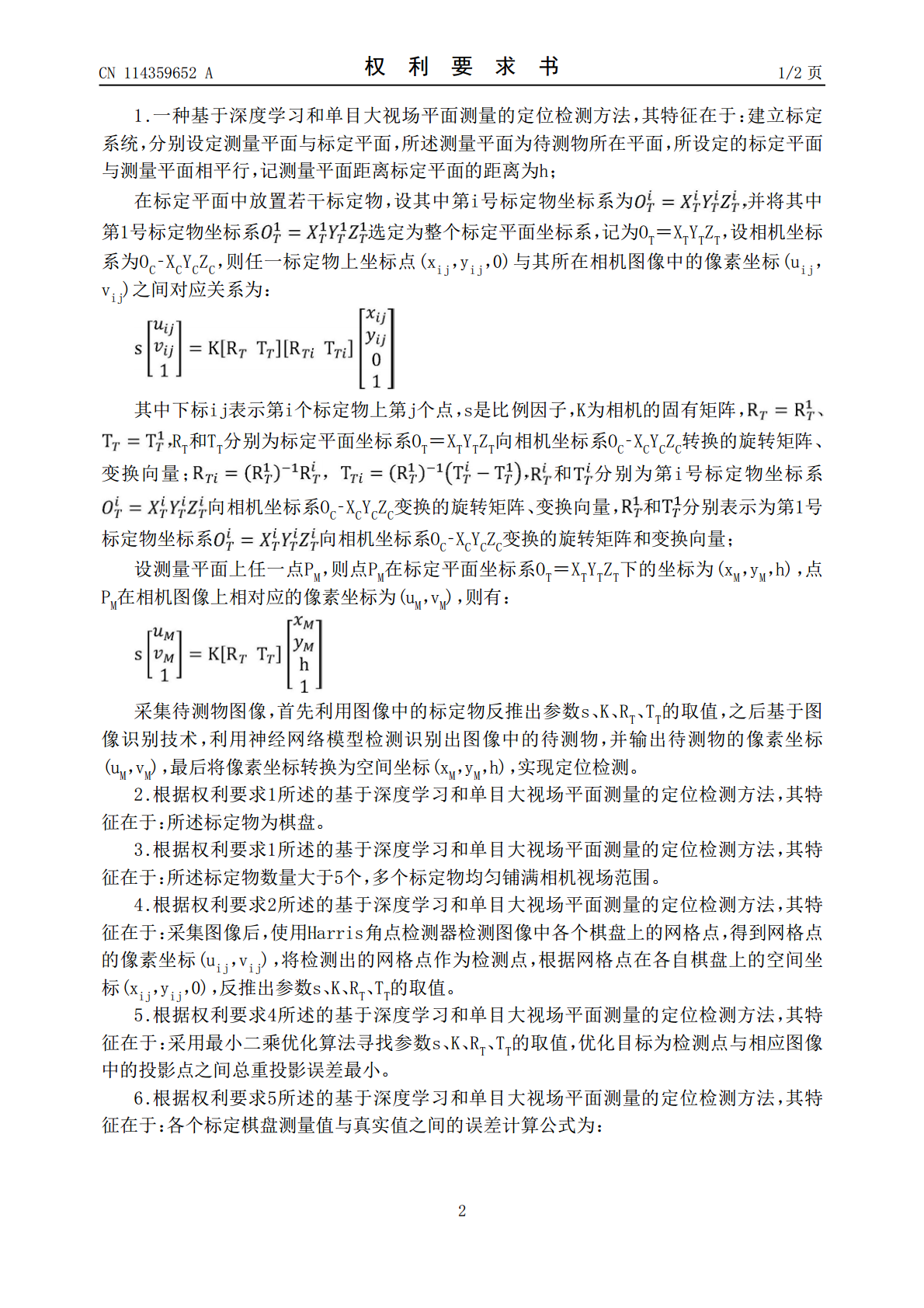
本发明提供了一种基于深度学习和单目大视场平面测量的定位检测方法,首先建立标定系统,分别设定测量平面与标定平面,测量平面为待测物所在平面,所设定的标定平面与测量平面相平行,并记下两平面间距离h;在标定平面中放置若干标定棋盘,并将其中第1号标定棋盘坐标系选定为整个标定平面坐标系,之后找出标定平面、测量平面和图像平面三者之间的对应变换关系,最后基于图像识别技术,采集待测物图像,依据图像中所放置的标定物推导出上述平面之间的变换关系,并以此关系将图像中的待测物像素坐标变换到真实空间坐标,达到定位检测的目的。本发明所

一种基于视场匹配的单目深度相机及其对物体形貌的检测方法.pdf
本发明公开了一种基于视场匹配的单目深度相机及其对物体形貌的检测方法,单目深度相机,包括:红外及可见复合光源,对结构光进行编码并投影到待测物体上的结构光投影光电引擎,采集待测物体表面的纹理信息的3D、2D实时融合光学相机,接收3D、2D实时融合光学相机信息的近红外图像传感器、可见光图像传感器,接收近红外图像传感器、可见光图像传感器的信号并得到得到待测物体的三维轮廓以及纹理信息的结构光三维成像总控。本发明消除了一般深度相机中可见光采集模块与红外采集模块的视差,省略了标定步骤,提高了测量精度,将一般深度相机信号
基于深度学习和单目摄影测量的混凝土表面裂缝测算方法.pptx
添加副标题目录PART01PART02深度学习的基本原理深度学习在混凝土表面裂缝检测中的优势深度学习在混凝土表面裂缝检测中的算法模型深度学习在混凝土表面裂缝检测中的实践案例PART03单目摄影测量的基本原理单目摄影测量在混凝土表面裂缝测算中的优势单目摄影测量在混凝土表面裂缝测算中的算法模型单目摄影测量在混凝土表面裂缝测算中的实践案例PART04深度学习和单目摄影测量的结合方式基于深度学习和单目摄影测量的混凝土表面裂缝测算方法流程基于深度学习和单目摄影测量的混凝土表面裂缝测算方法的优势和局限性基于深度学习和
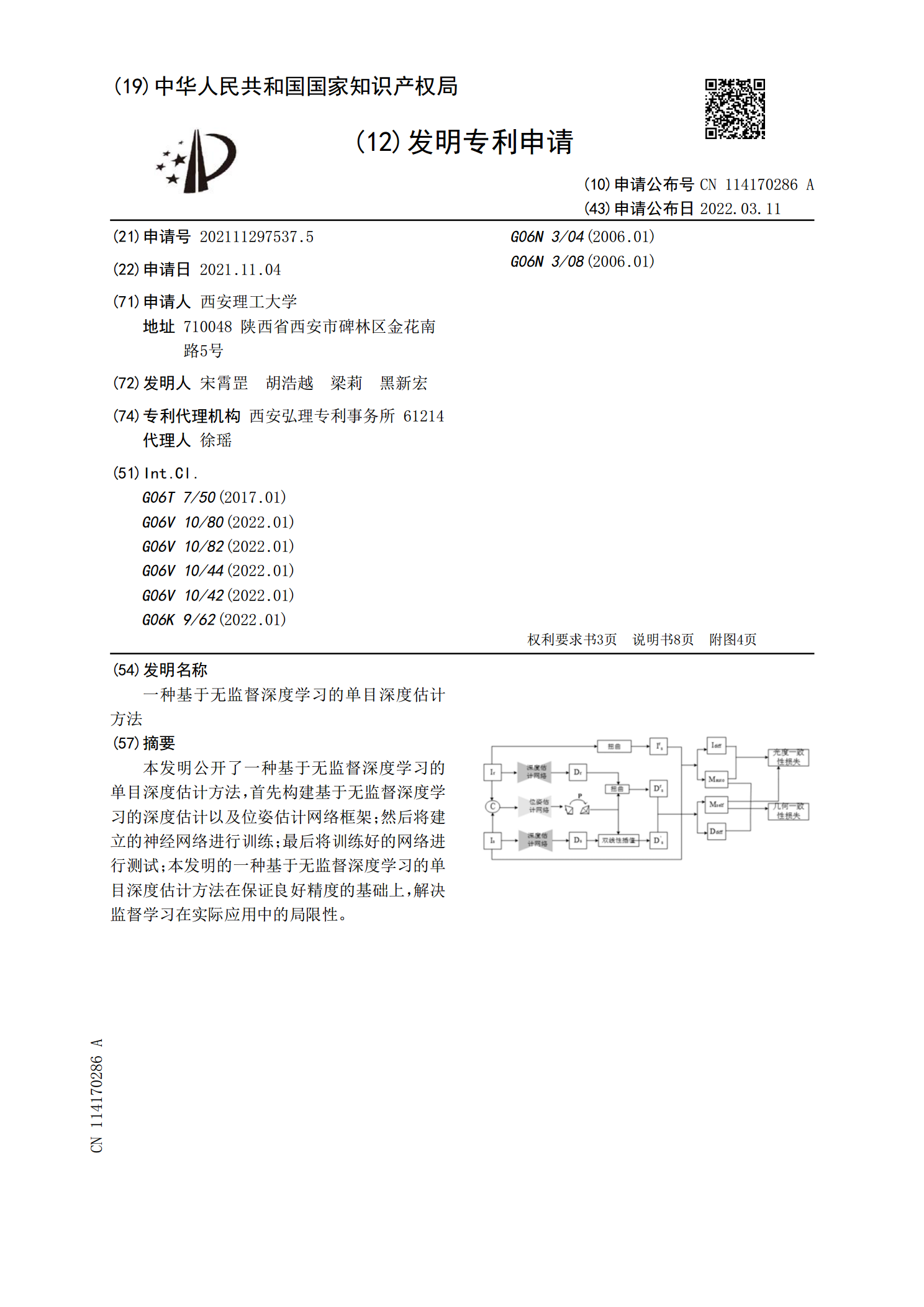
一种基于无监督深度学习的单目深度估计方法.pdf
本发明公开了一种基于无监督深度学习的单目深度估计方法,首先构建基于无监督深度学习的深度估计以及位姿估计网络框架;然后将建立的神经网络进行训练;最后将训练好的网络进行测试;本发明的一种基于无监督深度学习的单目深度估计方法在保证良好精度的基础上,解决监督学习在实际应用中的局限性。
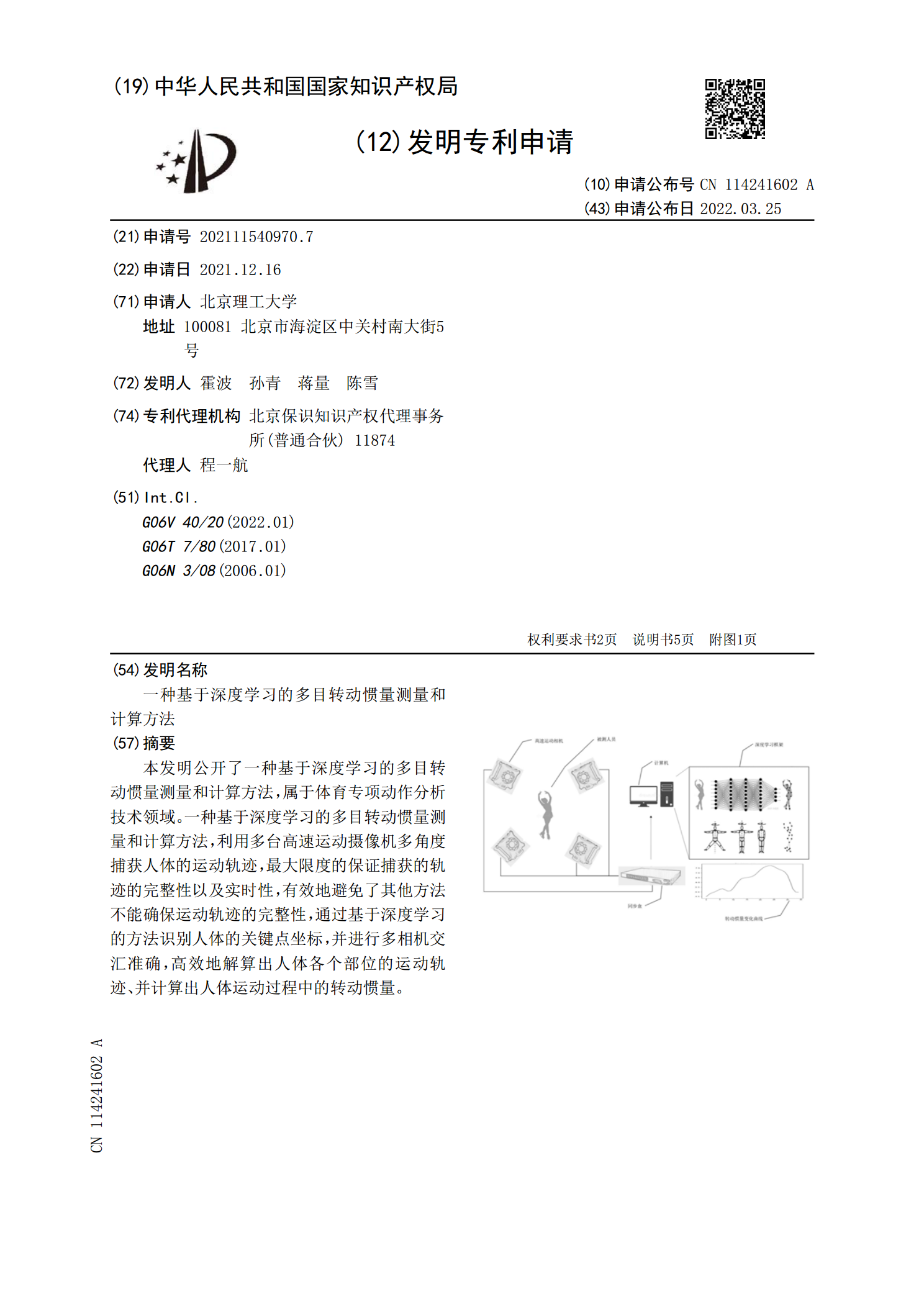
一种基于深度学习的多目转动惯量测量和计算方法.pdf
本发明公开了一种基于深度学习的多目转动惯量测量和计算方法,属于体育专项动作分析技术领域。一种基于深度学习的多目转动惯量测量和计算方法,利用多台高速运动摄像机多角度捕获人体的运动轨迹,最大限度的保证捕获的轨迹的完整性以及实时性,有效地避免了其他方法不能确保运动轨迹的完整性,通过基于深度学习的方法识别人体的关键点坐标,并进行多相机交汇准确,高效地解算出人体各个部位的运动轨迹、并计算出人体运动过程中的转动惯量。