
一种机器人关节电机伺服控制装置.pdf

fu****级甜


1/10
2/10
3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人关节电机伺服控制装置.pdf
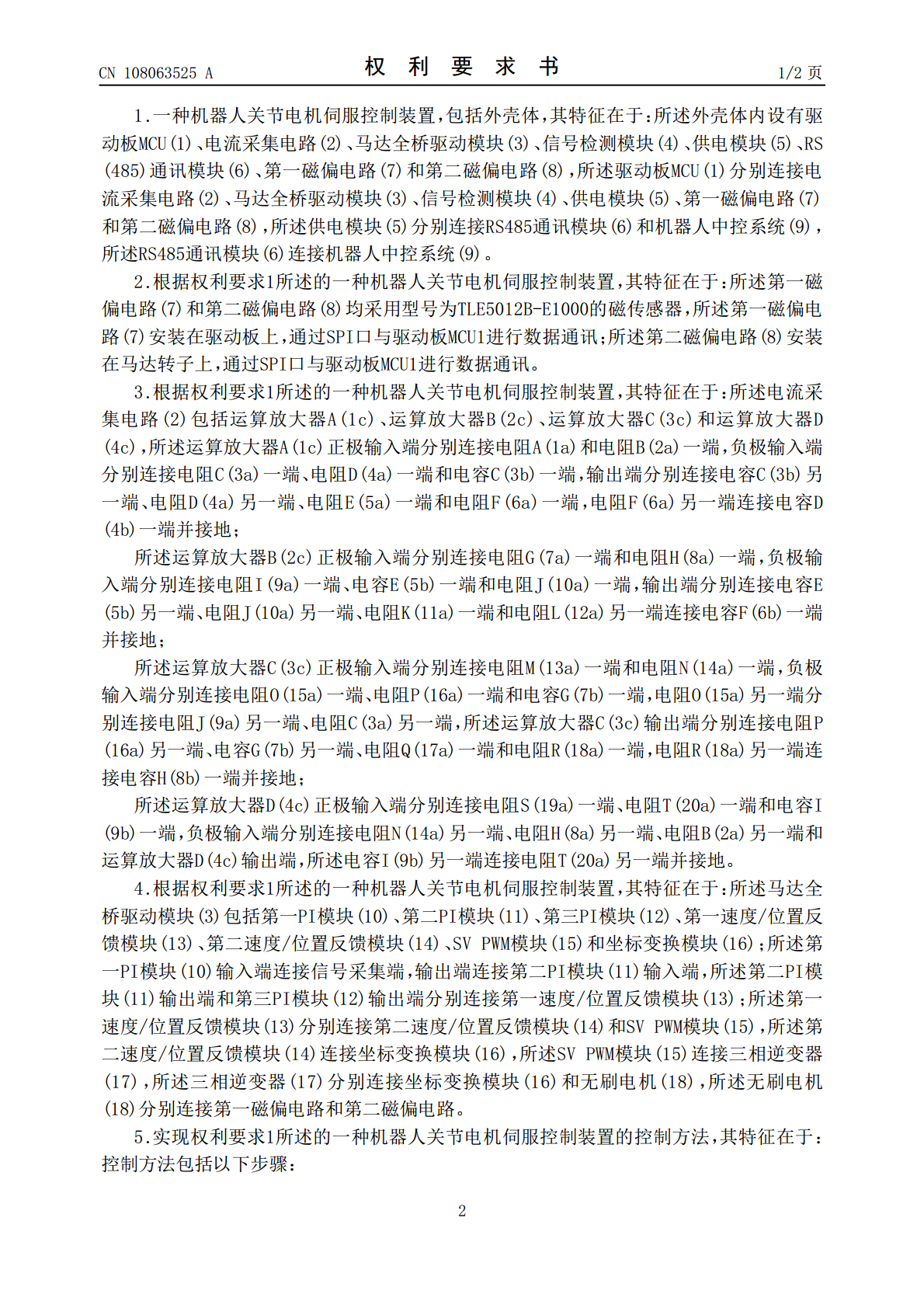
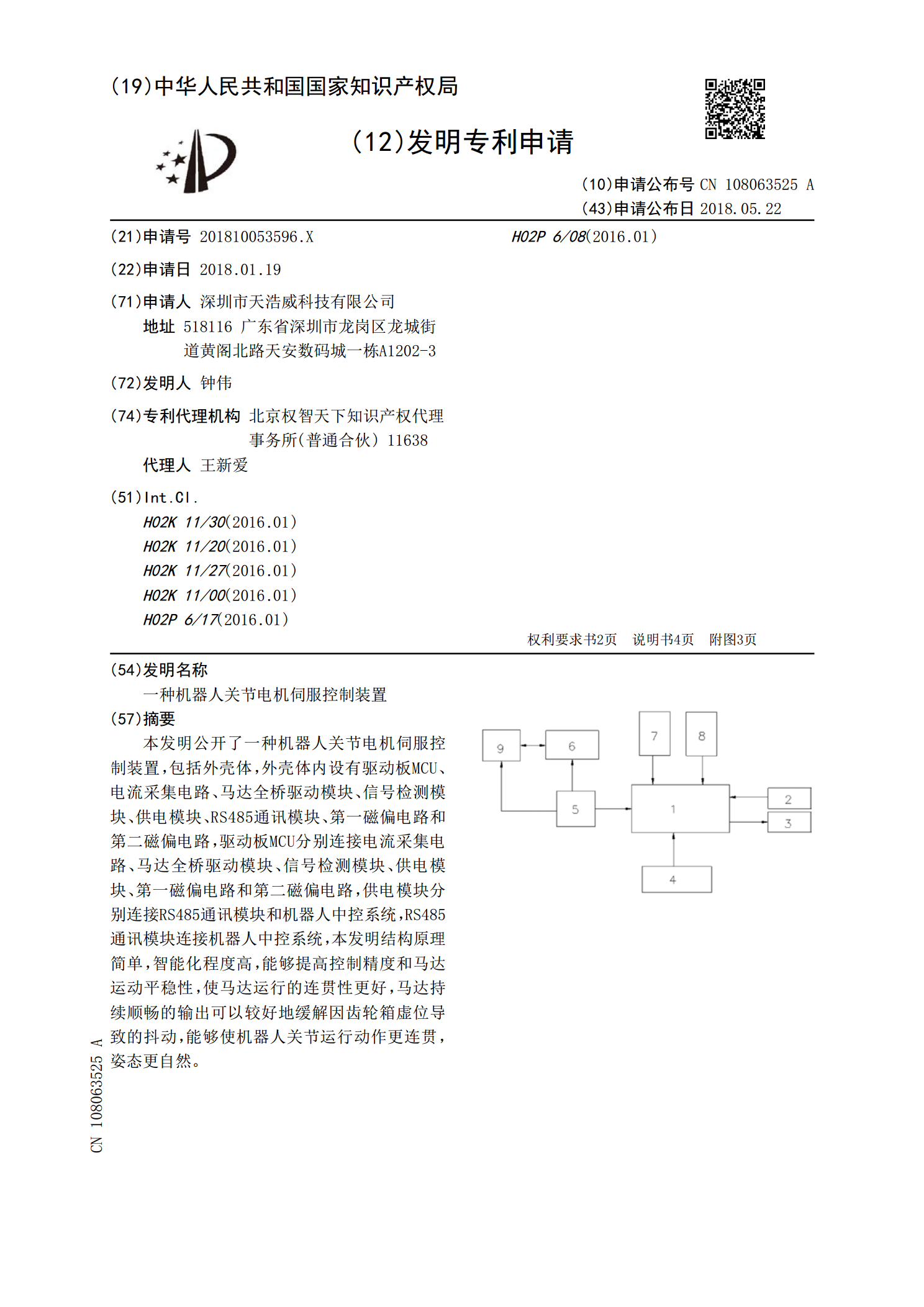
本发明公开了一种机器人关节电机伺服控制装置,包括外壳体,外壳体内设有驱动板MCU、电流采集电路、马达全桥驱动模块、信号检测模块、供电模块、RS485通讯模块、第一磁偏电路和第二磁偏电路,驱动板MCU分别连接电流采集电路、马达全桥驱动模块、信号检测模块、供电模块、第一磁偏电路和第二磁偏电路,供电模块分别连接RS485通讯模块和机器人中控系统,RS485通讯模块连接机器人中控系统,本发明结构原理简单,智能化程度高,能够提高控制精度和马达运动平稳性,使马达运行的连贯性更好,马达持续顺畅的输出可以较好地缓解因齿轮

一种伺服电机控制装置及方法.pdf
本发明公开了一种伺服电机控制装置及方法,包括壳体,所述壳体的侧壁上安装有滚轮,所述滚轮设置有四个,且四个滚轮分别安装在壳体的拐角处,所述壳体的四周安装有环块,所述环块的内侧与滚轮相对应位置处开设有导槽,所述滚轮与导槽滑动连接,所述环块的外侧壁上粘贴有软胶环,该伺服电机控制装置由壳体和环块组成,在当该控制装置摔落时,环块上的软胶环有助于提高整体的弹性,起到减振作用,同时环形结构在摔落时有可能会发生滚动,而由于壳体一端上安装有配重块,使得整体的重心偏于一端,使得该控制装置可以很快发生倾斜并处于静止状态,大大避
伺服控制装置、机器人及伺服控制方法.pdf
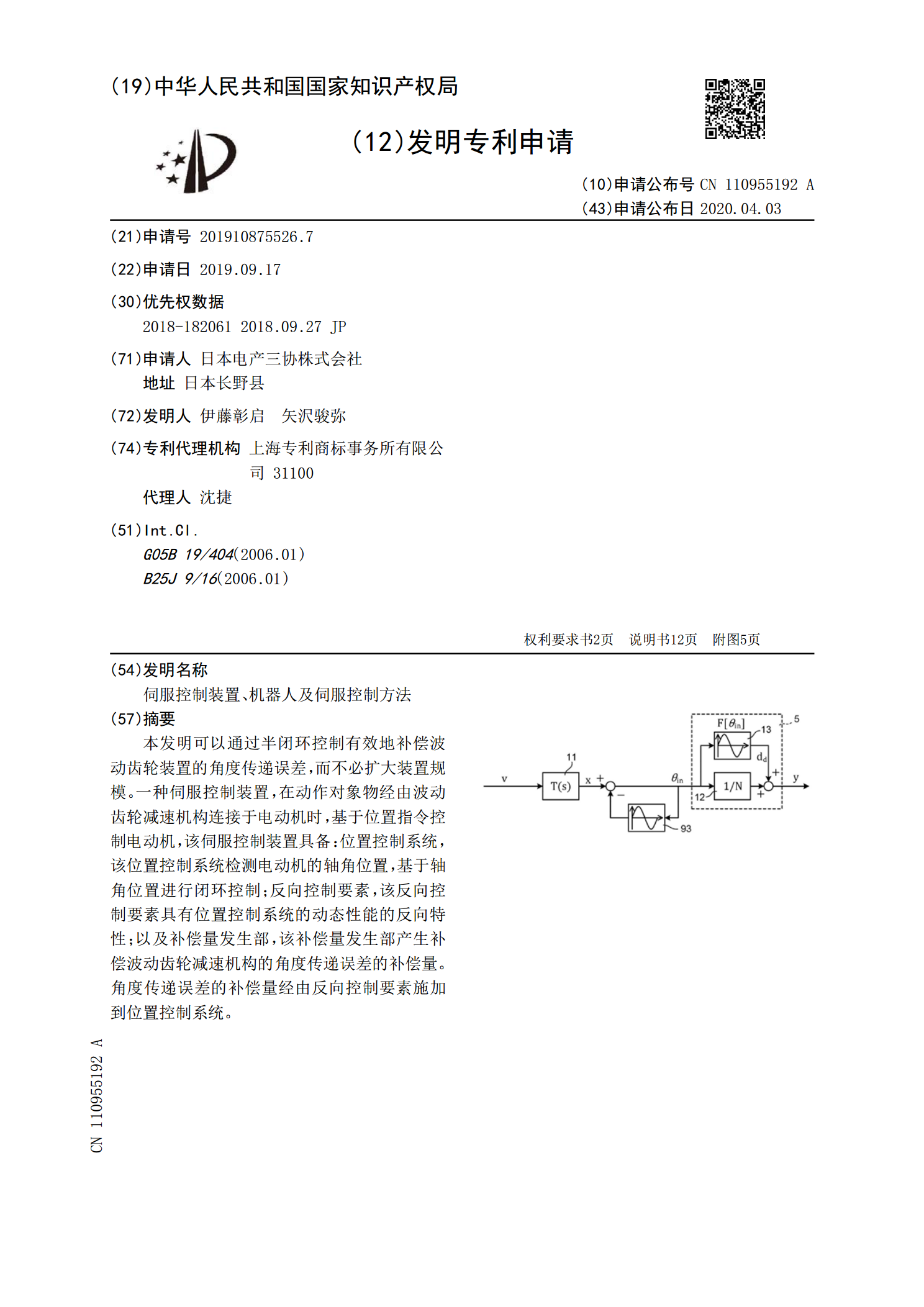
本发明可以通过半闭环控制有效地补偿波动齿轮装置的角度传递误差,而不必扩大装置规模。一种伺服控制装置,在动作对象物经由波动齿轮减速机构连接于电动机时,基于位置指令控制电动机,该伺服控制装置具备:位置控制系统,该位置控制系统检测电动机的轴角位置,基于轴角位置进行闭环控制;反向控制要素,该反向控制要素具有位置控制系统的动态性能的反向特性;以及补偿量发生部,该补偿量发生部产生补偿波动齿轮减速机构的角度传递误差的补偿量。角度传递误差的补偿量经由反向控制要素施加到位置控制系统。

一种伺服电机控制的燃料测量装置.pdf
本发明公开了一种伺服电机控制的燃料测量装置,该装置中,连杆的一端通过弹簧与齿条相连,另一端通过活塞销和活塞相连,位移传感器测量连杆的位移,活塞置于量筒内,量筒的底部、出油油管和进油油管通过电磁三通阀连接,压力传感器安装在出油油管上,压力传感器和伺服电机均与电子控制单元相连,齿轮固定在服电机的输出轴上,并与齿条啮合;应用本发明来测量发动机的油耗,不用装拆油箱,操作方便简单;电子控制单元直接调节控制电机,保持油压的稳定,测量数据准确、工作稳定;本发明不需改装发动机或其他油耗装置的油路系统,结构通用性强,适用广

一种用于工业机器人的伺服电机刹车器释放装置.pdf
本发明提供一种用于工业机器人的伺服电机刹车器释放装置,所述伺服电机刹车器释放装置与电源以及工业机器人本体相连,所述工业机器人本体具有伺服电机刹车器,所述电源为工业机器人本体的外接电源,所述伺服电机刹车器释放装置控制所述伺服电机刹车器释放以允许人工移动工业机器人本体关节解除干涉。本发明的用于工业机器人的伺服电机刹车器释放装置具有以下优点,在工业机器人使用过程中,实现了工业机器人快速脱离干涉;本发明的方案只需在每台工业机器人本体上预留一个连接位或插头,配合本发明的伺服电机刹车器释放装置即连接即用,用完即断开,