
伺服控制装置、机器人及伺服控制方法.pdf

邻家****文章


1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
伺服控制装置、机器人及伺服控制方法.pdf
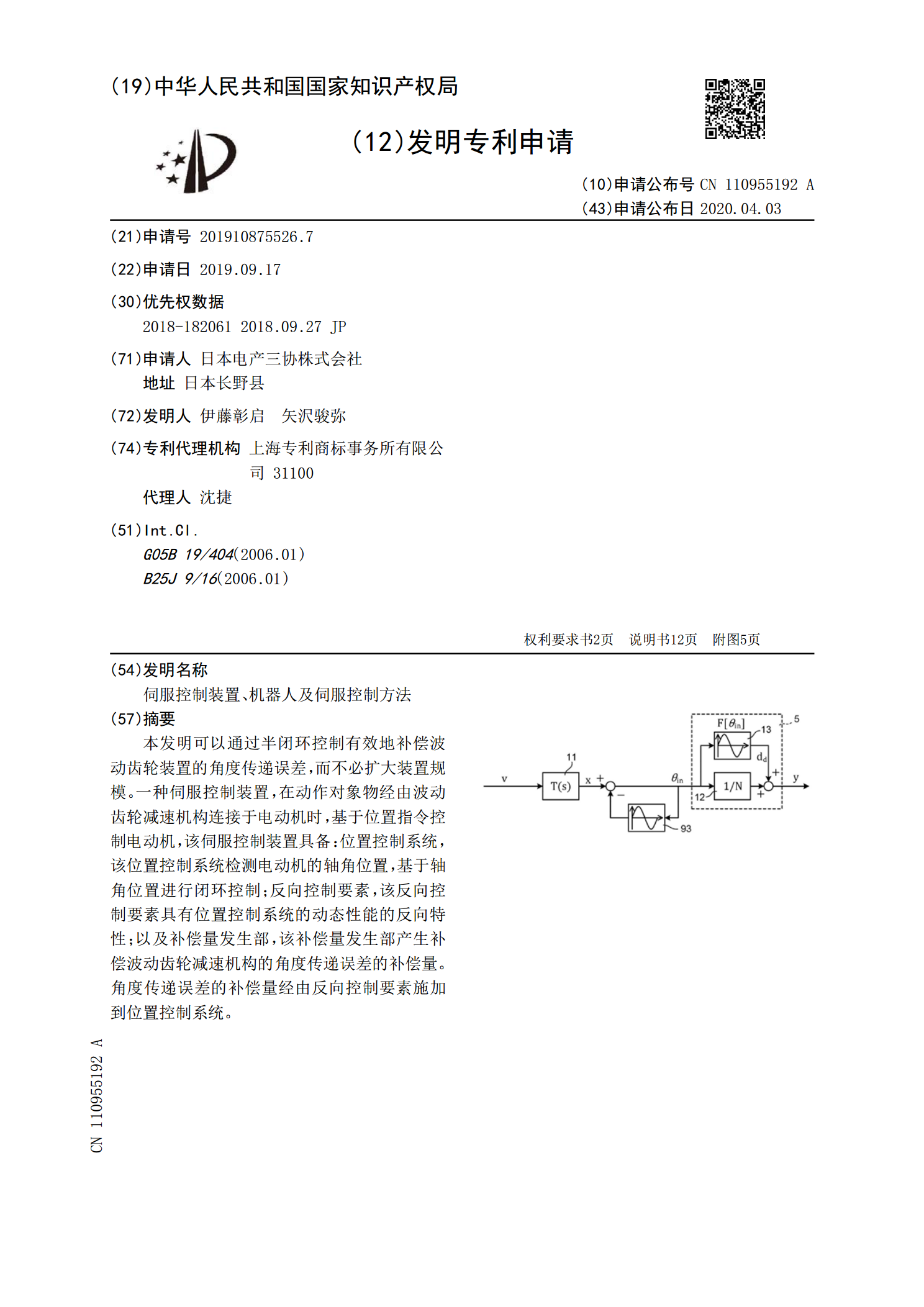
本发明可以通过半闭环控制有效地补偿波动齿轮装置的角度传递误差,而不必扩大装置规模。一种伺服控制装置,在动作对象物经由波动齿轮减速机构连接于电动机时,基于位置指令控制电动机,该伺服控制装置具备:位置控制系统,该位置控制系统检测电动机的轴角位置,基于轴角位置进行闭环控制;反向控制要素,该反向控制要素具有位置控制系统的动态性能的反向特性;以及补偿量发生部,该补偿量发生部产生补偿波动齿轮减速机构的角度传递误差的补偿量。角度传递误差的补偿量经由反向控制要素施加到位置控制系统。

伺服控制装置和光盘装置.pdf
本发明提供一种伺服控制装置和光盘装置,其能够提高对干扰的追踪性能。具备为提高对干扰的追踪性能而对特性进行变更的特性变更部,使用特性变更部的输出信号的后级的信号检测干扰。

平衡车行驶的控制方法、装置及伺服控制系统.pdf
本申请提供了平衡车行驶的控制方法、装置及伺服控制系统,其中一种方法包括:在平衡车行驶方向的路面上,获取目标路面区域与平衡车之间的目标路面信息;依据所述目标路面信息,判断所述目标路面区域内是否包含非平整区域;若所述目标路面区域内不包含非平整区域,或,所述目标路面区域内包含的非平整区域与平衡车的行驶区域的交集为空集,控制所述平衡车继续按原始操作行驶;若所述非平整区域与平衡车的行驶区域的交集不为空集,则控制所述平衡车按预设操作行驶。本申请通过距离检测装置和控制器的配合使用,可以实现检测路面是否平整的目的。

一种伺服电批的控制方法及控制装置.pdf
本发明公开了一种伺服电批的控制方法及控制装置,所述控制方法包括:在伺服电批执行锁附螺丝的程序时,获取实际锁附参数和目标锁附参数;基于实际锁附参数获取实际曲线模型,并基于目标锁附参数获取理论曲线模型;判断实际锁附参数是否到达目标锁附参数;若是,则判断所述实际曲线模型是否满足所述理论曲线模型;当所述实际曲线模型满足所述理论曲线模型时,锁附螺丝合格;当所述实际曲线模型不满足所述理论曲线模型时,锁附螺丝不合格。如此设置,可以检测到滑牙、浮高、未打紧、锁偏等一系列的质量异常情况。

伺服驱动与控制—伺服驱动.pptx
会计学一、概述一、概述一、概述二、直流伺服电机与驱动控制二、直流伺服电机与驱动控制二、直流伺服电机与驱动控制二、直流伺服电机与驱动控制二、直流伺服电机与驱动控制二、直流伺服电机与驱动控制二、直流伺服电机与驱动控制二、直流伺服电机与驱动控制二、直流伺服电机与驱动控制二、直流伺服电机与驱动控制二、直流伺服电机与驱动控制二、直流伺服电机与驱动控制二、直流伺服电机与驱动控制三、步进电机与驱动控制三、步进电机与驱动控制三、步进电机与驱动控制三、步进电机与驱动控制三、步进电机与驱动控制三、步进电机与驱动控制三、步进电