
一种用于玻璃搬运机械手.pdf

雨巷****轶丽


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于玻璃搬运的机械手.pdf
本发明公开了一种用于玻璃搬运的机械手,包括:基座、立柱、机械臂、机械手和承托架,立柱设于基座上,机械臂安装于立柱上,机械手安装于机械臂上,承托架安装于立柱上,并与机械手相配合,基座的下方设有滑轮,机械手上设有用于检测玻璃尺寸的尺寸检测装置;承托架中设有横向连接杆、托架和玻璃位置检测装置,横向连接杆采用电动伸缩式连接杆,其安装于立柱上连接,托架安装于横向连接杆的端部,玻璃位置检测装置安装于托架上。本发明在机械手上设置玻璃位置检测装置让其对玻璃的位置进行检测,机械手根据位置对玻璃进行抓取,通过承托架对抓取的玻

一种用于玻璃搬运机械手.pdf
本发明公开了一种用于玻璃搬运机械手,包括底座、液压缸、支撑柱、液压伸缩杆A、液压伸缩杆B、液压伸缩杆C、抽气泵、外壳、抽气板、吸盘、收线电机、滑轮、高压吹气泵、吹气板、复位弹簧、吹气头以及L卡爪;所述底座上开设有纵向凹槽,纵向凹槽内卡接安装有液压缸,液压缸的顶部焊接安装有支撑柱,支撑柱的顶部与液压伸缩杆B的右端通过销轴连接,并在支撑柱和液压伸缩杆B设有倾斜的液压伸缩杆A;本发明在吸盘的间隙安装有高压喷气头,可以将玻璃上的杂质清除干净,方便吸盘吸附;并在吸盘下侧设有自动回复的L形卡爪,可以避免吸盘出现漏气时

一种适用于玻璃模具焊接的自动搬运机械手.pdf
本发明公开了一种适用于玻璃模具焊接的自动搬运机械手。包括基座、导轨、滑动平台、两只机械手、伺服电机、同步带轮和同步带;在基座上安装滑轨,滑轨上安装有两只机械手,每只机械手壳体内安装伺服电机,伺服电机主轴与同步带轮连接;同步带与同步带轮啮合,带两端固定在滑轨内测并绷紧;滑块侧面安装有引拔装置,引拔装置与一个气缸相连接;引拔装置上安装有手抓气缸和夹持机构。本发明适用于玻璃模具在不同工序间焊接时的全自动化搬运。机械手能实现每一个工序之间的物料自动传递,具有结构简单、控制可靠、精确定位等优点,并且代替了两个工人在
一种玻璃基板搬运机械手臂.pdf
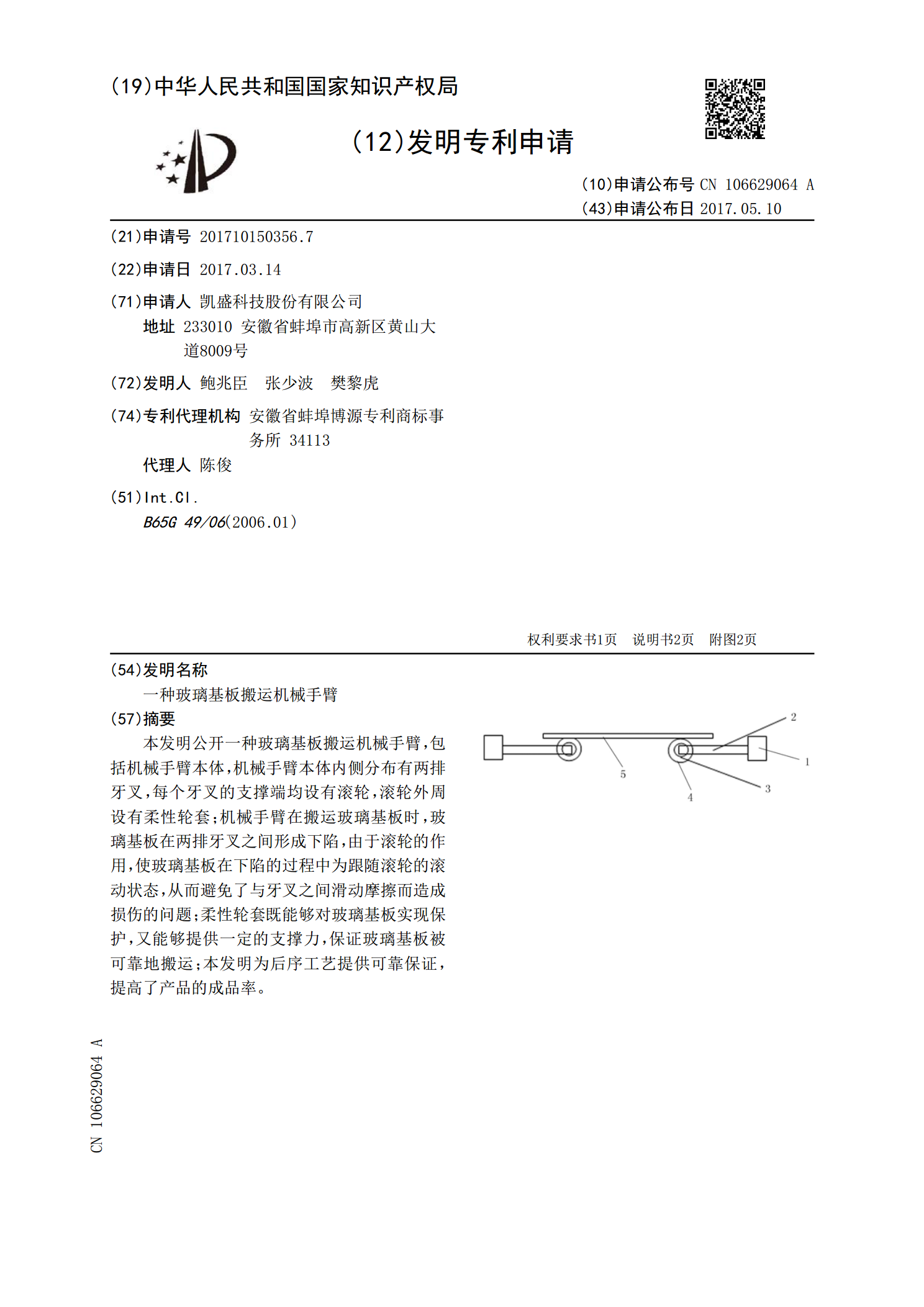
本发明公开一种玻璃基板搬运机械手臂,包括机械手臂本体,机械手臂本体内侧分布有两排牙叉,每个牙叉的支撑端均设有滚轮,滚轮外周设有柔性轮套;机械手臂在搬运玻璃基板时,玻璃基板在两排牙叉之间形成下陷,由于滚轮的作用,使玻璃基板在下陷的过程中为跟随滚轮的滚动状态,从而避免了与牙叉之间滑动摩擦而造成损伤的问题;柔性轮套既能够对玻璃基板实现保护,又能够提供一定的支撑力,保证玻璃基板被可靠地搬运;本发明为后序工艺提供可靠保证,提高了产品的成品率。
一种玻璃管搬运机械手.pdf
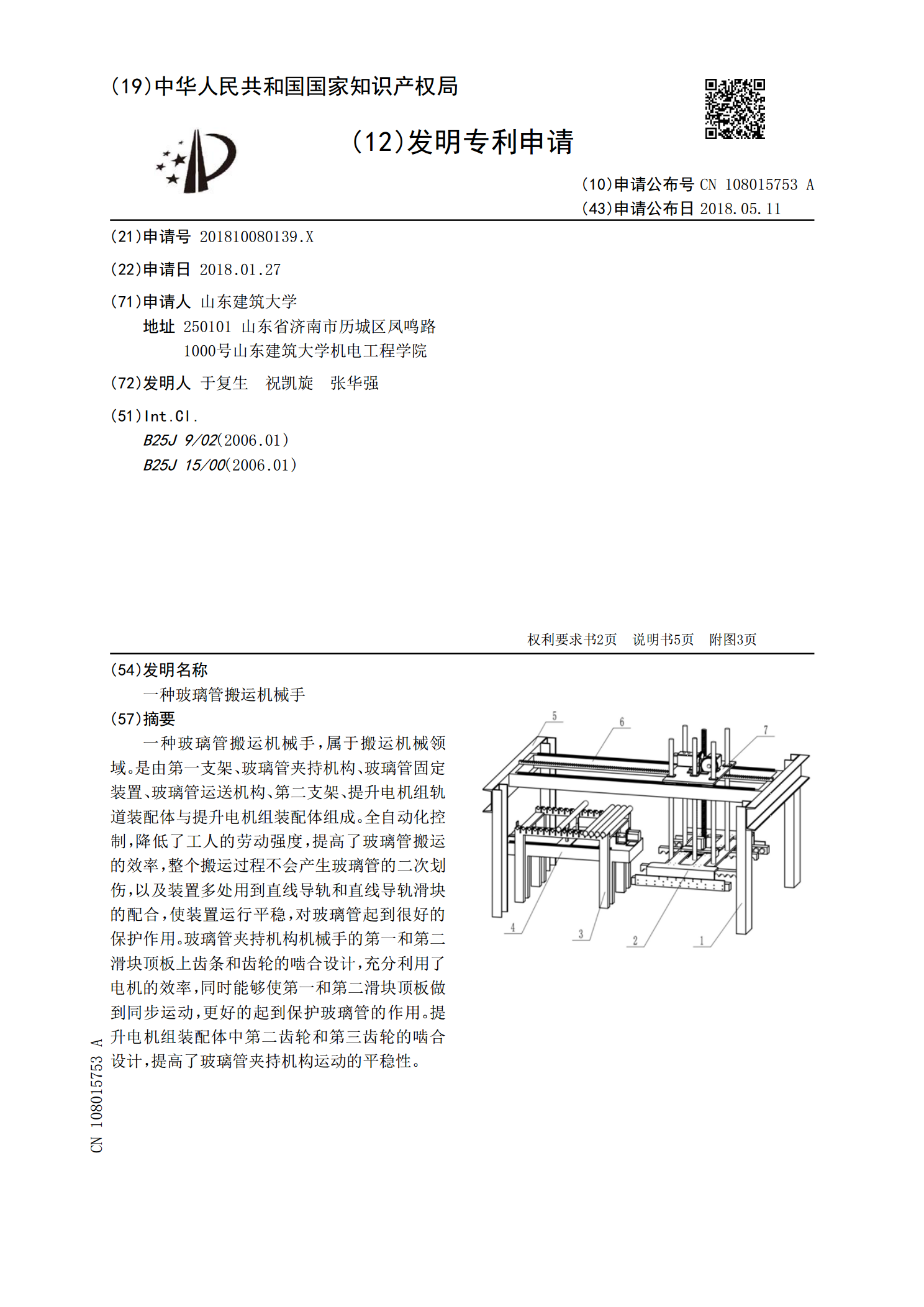
一种玻璃管搬运机械手,属于搬运机械领域。是由第一支架、玻璃管夹持机构、玻璃管固定装置、玻璃管运送机构、第二支架、提升电机组轨道装配体与提升电机组装配体组成。全自动化控制,降低了工人的劳动强度,提高了玻璃管搬运的效率,整个搬运过程不会产生玻璃管的二次划伤,以及装置多处用到直线导轨和直线导轨滑块的配合,使装置运行平稳,对玻璃管起到很好的保护作用。玻璃管夹持机构机械手的第一和第二滑块顶板上齿条和齿轮的啮合设计,充分利用了电机的效率,同时能够使第一和第二滑块顶板做到同步运动,更好的起到保护玻璃管的作用。提升电机组