
一种焊接机器人.pdf

书生****萌哒


1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种焊接辅助机器人.pdf
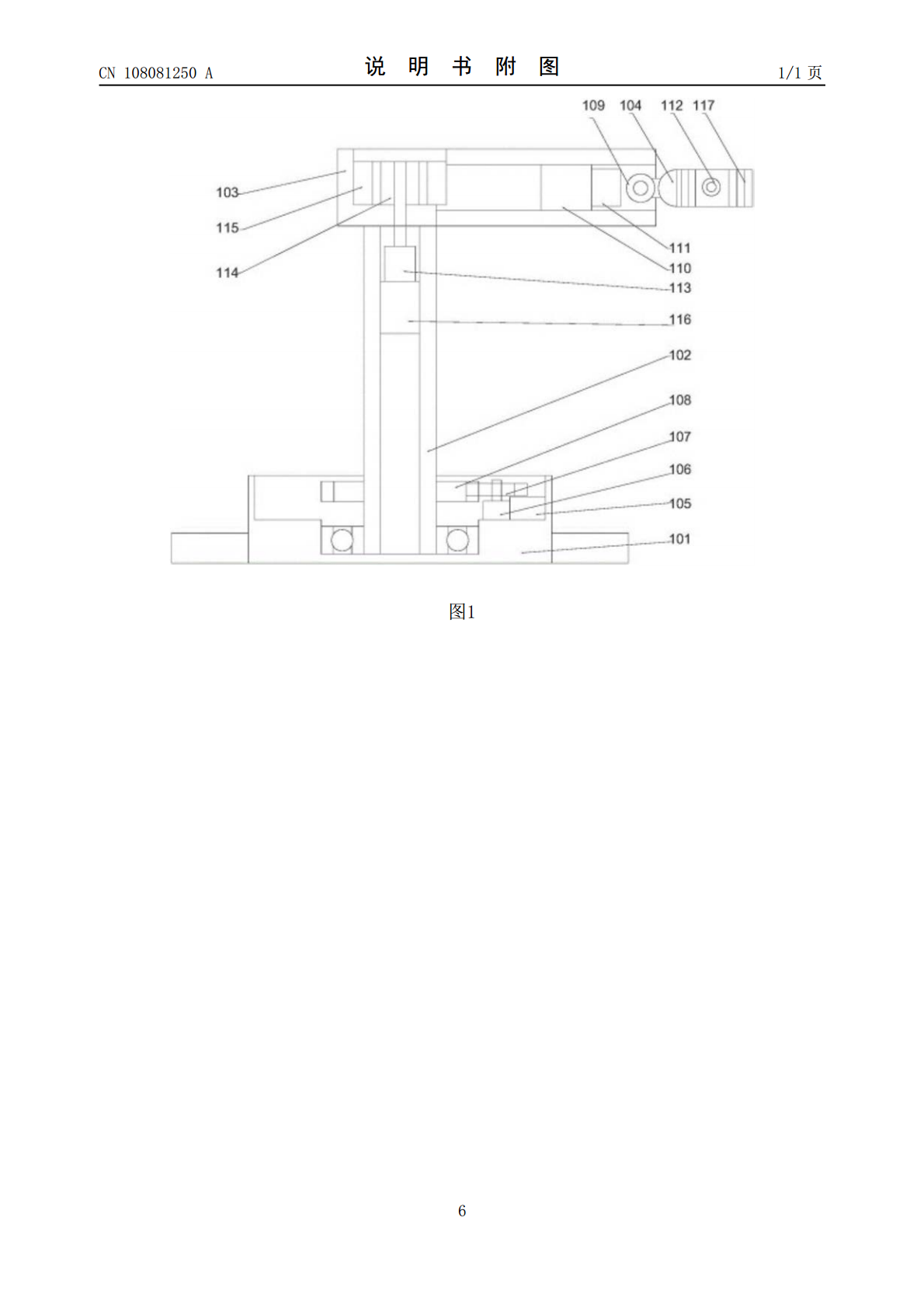
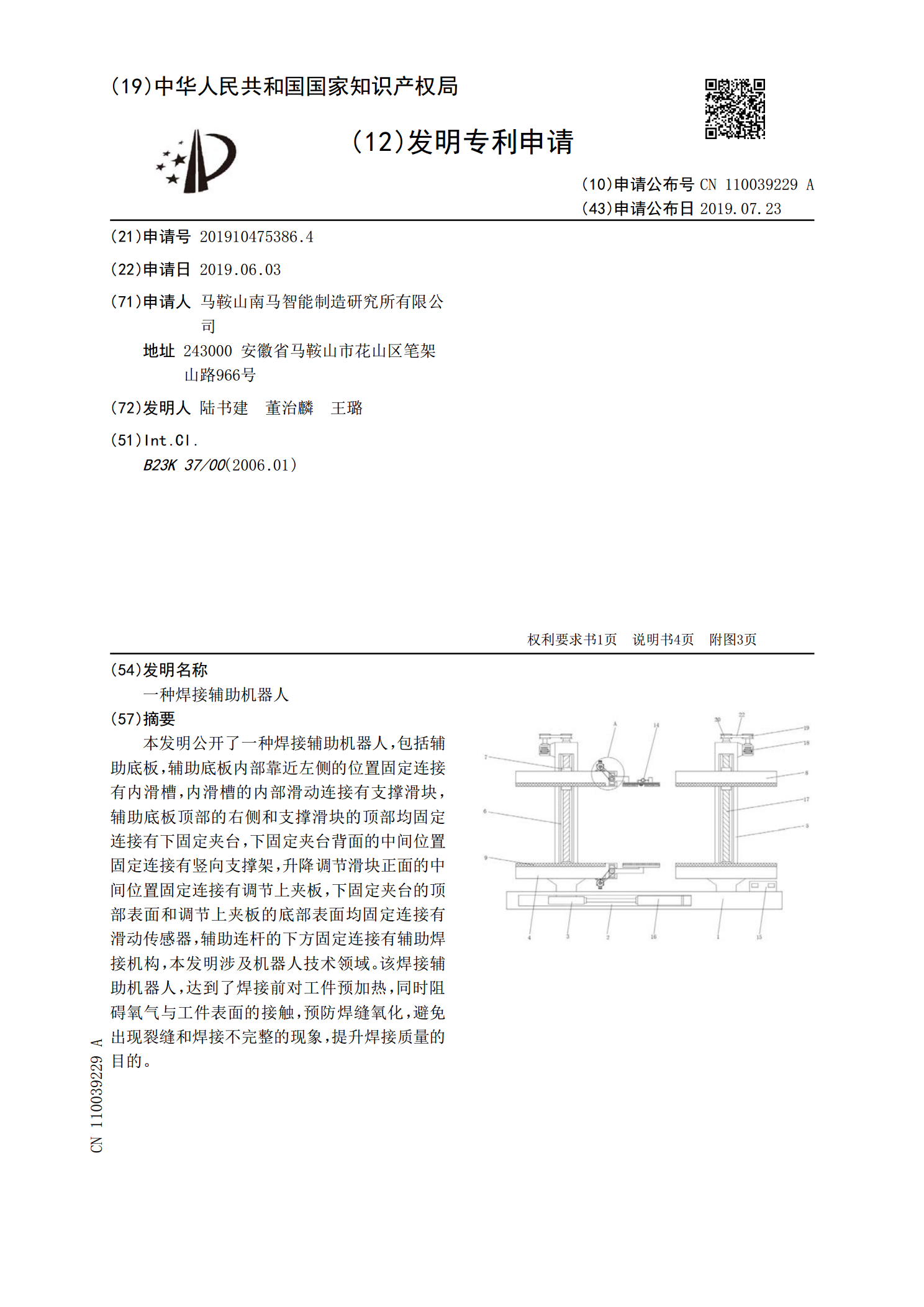
本发明公开了一种焊接辅助机器人,包括辅助底板,辅助底板内部靠近左侧的位置固定连接有内滑槽,内滑槽的内部滑动连接有支撑滑块,辅助底板顶部的右侧和支撑滑块的顶部均固定连接有下固定夹台,下固定夹台背面的中间位置固定连接有竖向支撑架,升降调节滑块正面的中间位置固定连接有调节上夹板,下固定夹台的顶部表面和调节上夹板的底部表面均固定连接有滑动传感器,辅助连杆的下方固定连接有辅助焊接机构,本发明涉及机器人技术领域。该焊接辅助机器人,达到了焊接前对工件预加热,同时阻碍氧气与工件表面的接触,预防焊缝氧化,避免出现裂缝和焊接
一种焊接用机器人.pdf
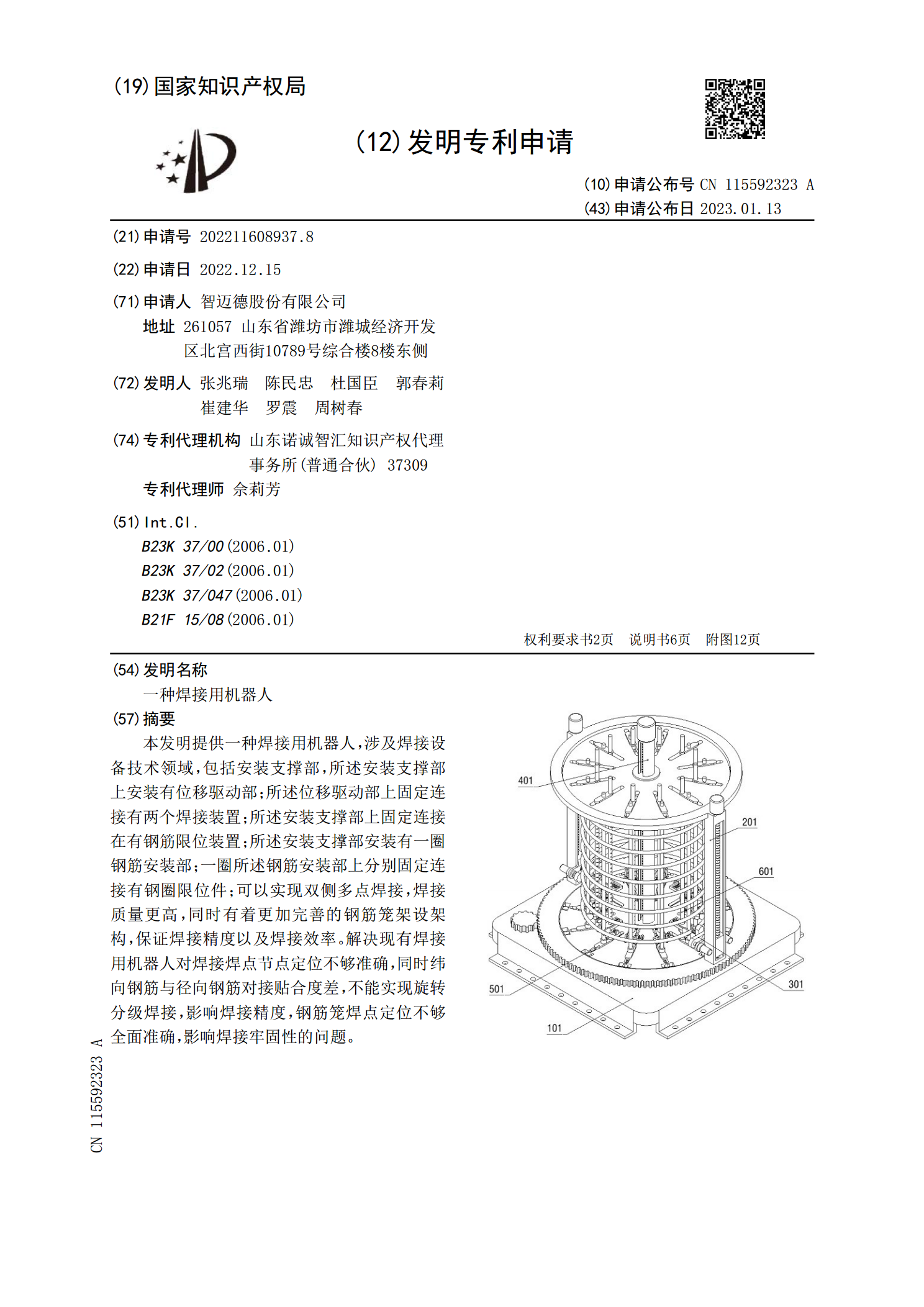
本发明提供一种焊接用机器人,涉及焊接设备技术领域,包括安装支撑部,所述安装支撑部上安装有位移驱动部;所述位移驱动部上固定连接有两个焊接装置;所述安装支撑部上固定连接在有钢筋限位装置;所述安装支撑部安装有一圈钢筋安装部;一圈所述钢筋安装部上分别固定连接有钢圈限位件;可以实现双侧多点焊接,焊接质量更高,同时有着更加完善的钢筋笼架设架构,保证焊接精度以及焊接效率。解决现有焊接用机器人对焊接焊点节点定位不够准确,同时纬向钢筋与径向钢筋对接贴合度差,不能实现旋转分级焊接,影响焊接精度,钢筋笼焊点定位不够全面准确,影
一种机器人焊接装置.pdf
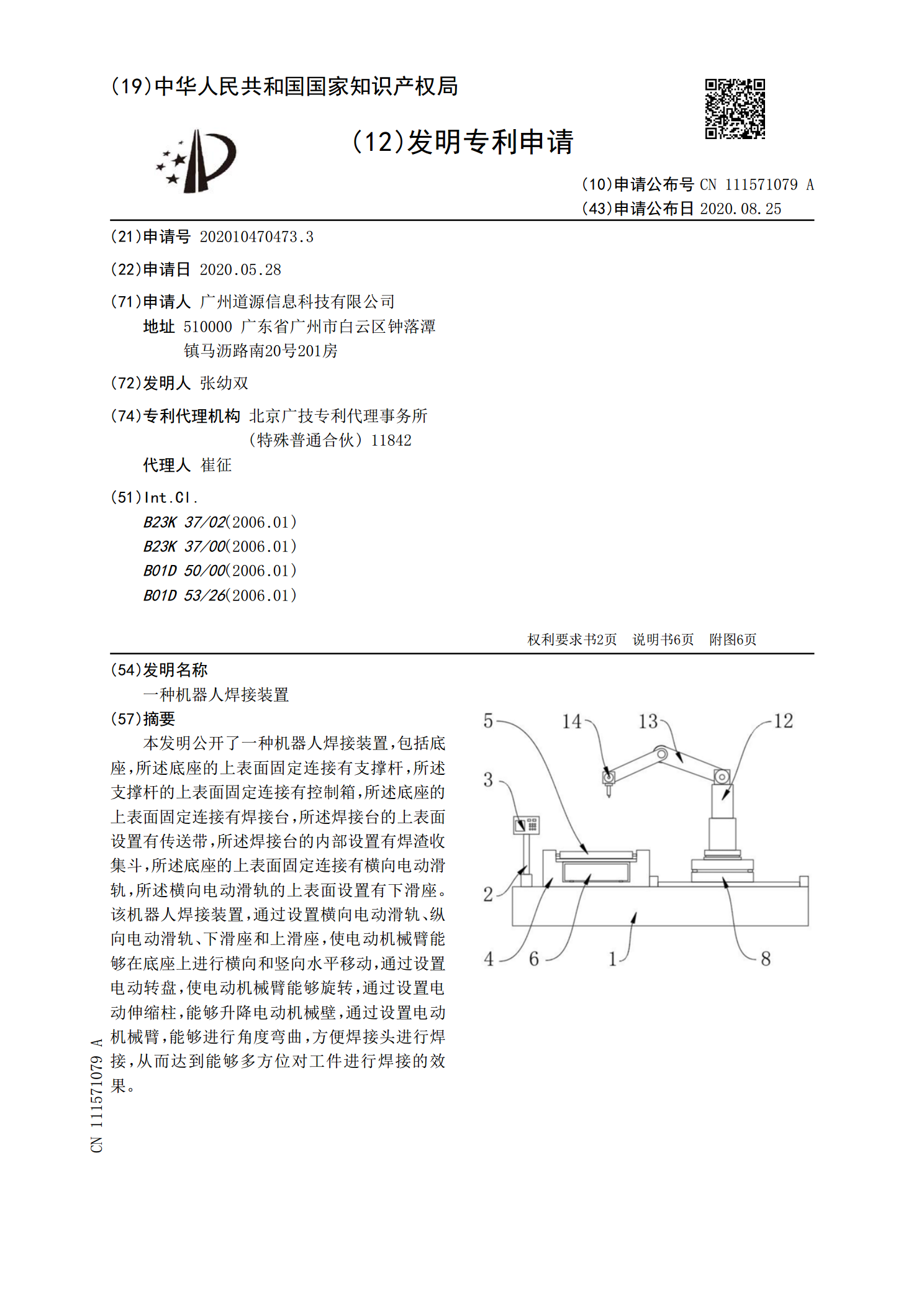
本发明公开了一种机器人焊接装置,包括底座,所述底座的上表面固定连接有支撑杆,所述支撑杆的上表面固定连接有控制箱,所述底座的上表面固定连接有焊接台,所述焊接台的上表面设置有传送带,所述焊接台的内部设置有焊渣收集斗,所述底座的上表面固定连接有横向电动滑轨,所述横向电动滑轨的上表面设置有下滑座。该机器人焊接装置,通过设置横向电动滑轨、纵向电动滑轨、下滑座和上滑座,使电动机械臂能够在底座上进行横向和竖向水平移动,通过设置电动转盘,使电动机械臂能够旋转,通过设置电动伸缩柱,能够升降电动机械壁,通过设置电动机械臂,能
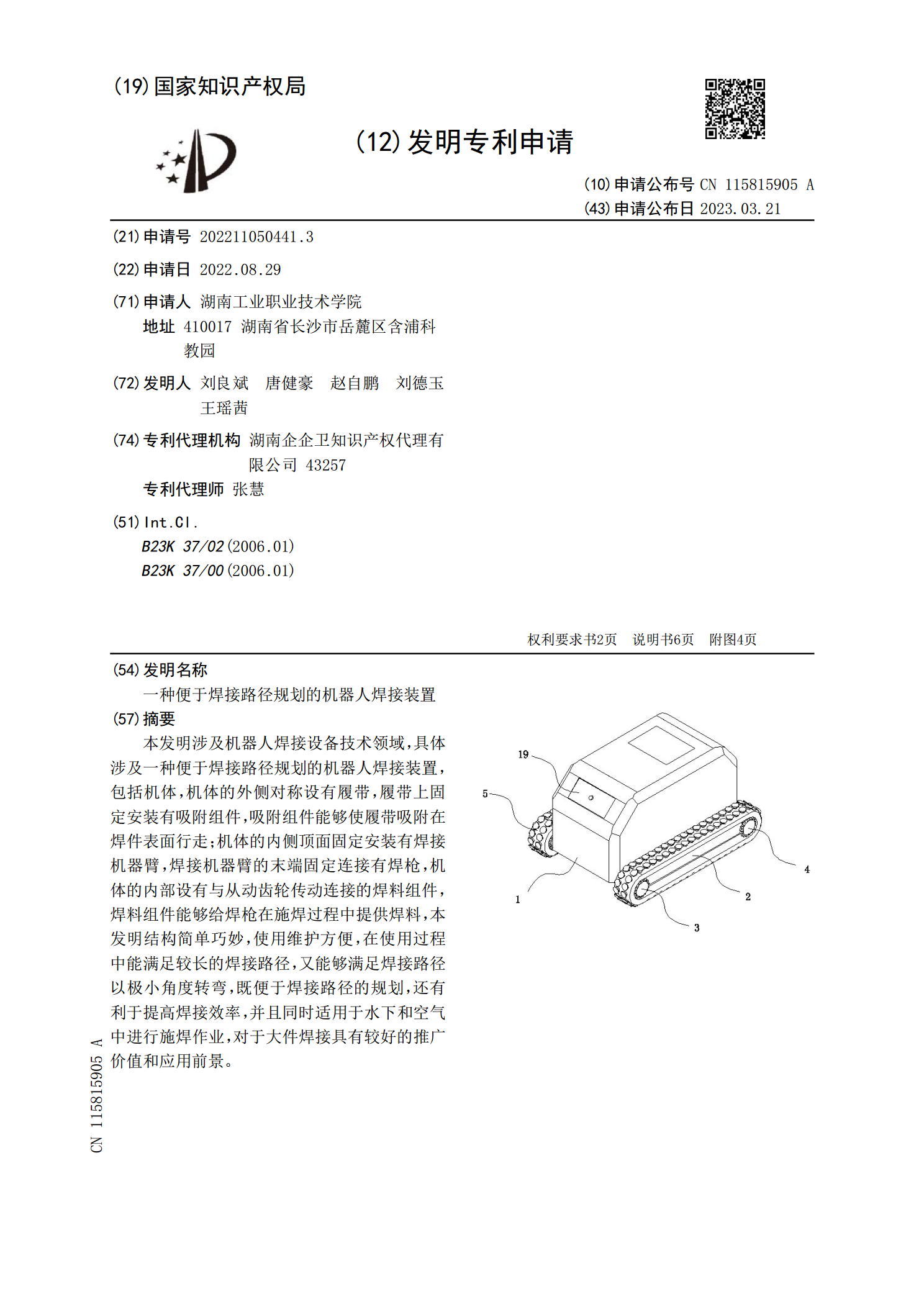
一种便于焊接路径规划的机器人焊接装置.pdf
本发明涉及机器人焊接设备技术领域,具体涉及一种便于焊接路径规划的机器人焊接装置,包括机体,机体的外侧对称设有履带,履带上固定安装有吸附组件,吸附组件能够使履带吸附在焊件表面行走;机体的内侧顶面固定安装有焊接机器臂,焊接机器臂的末端固定连接有焊枪,机体的内部设有与从动齿轮传动连接的焊料组件,焊料组件能够给焊枪在施焊过程中提供焊料,本发明结构简单巧妙,使用维护方便,在使用过程中能满足较长的焊接路径,又能够满足焊接路径以极小角度转弯,既便于焊接路径的规划,还有利于提高焊接效率,并且同时适用于水下和空气中进行施焊
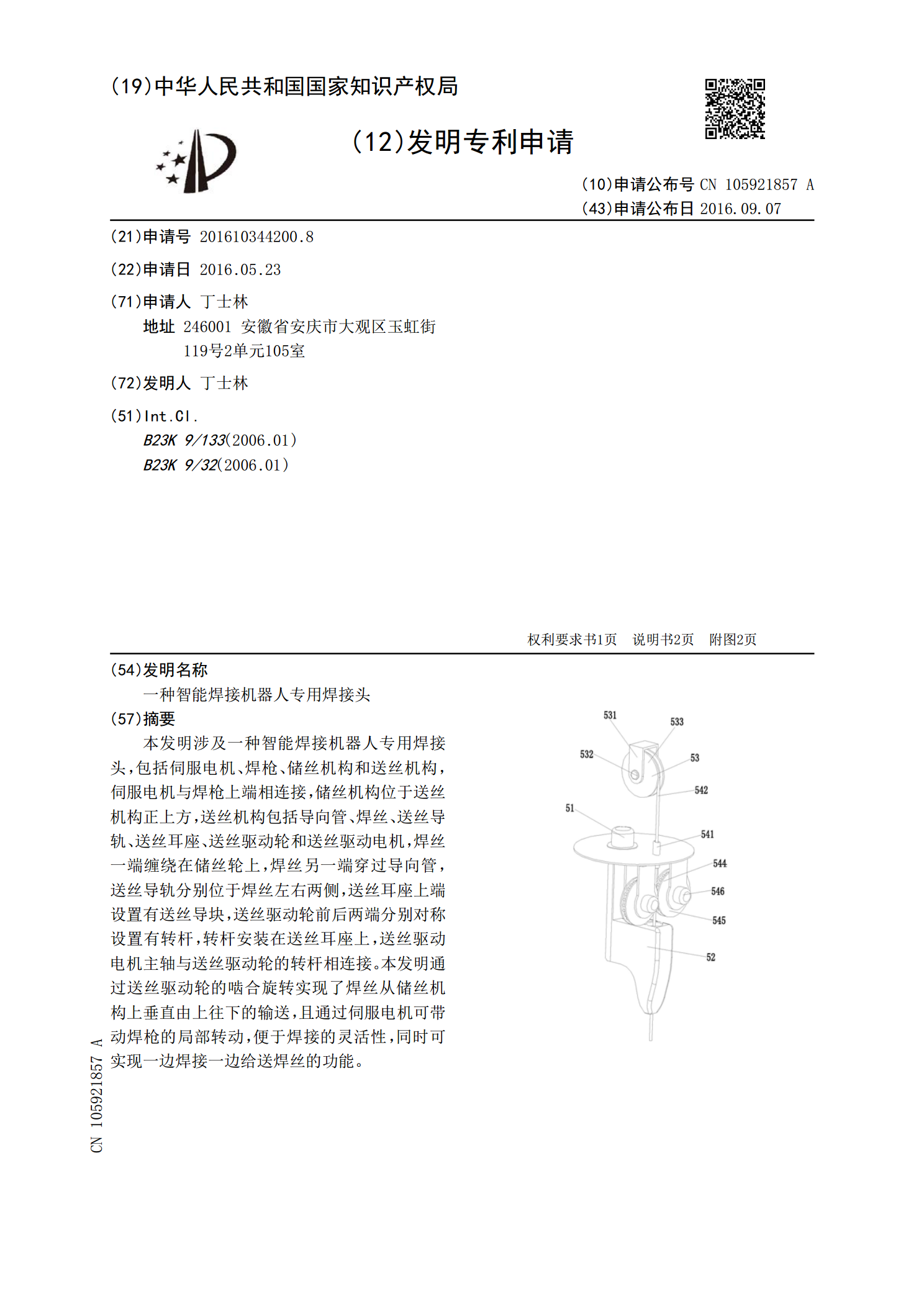
一种智能焊接机器人专用焊接头.pdf
本发明涉及一种智能焊接机器人专用焊接头,包括伺服电机、焊枪、储丝机构和送丝机构,伺服电机与焊枪上端相连接,储丝机构位于送丝机构正上方,送丝机构包括导向管、焊丝、送丝导轨、送丝耳座、送丝驱动轮和送丝驱动电机,焊丝一端缠绕在储丝轮上,焊丝另一端穿过导向管,送丝导轨分别位于焊丝左右两侧,送丝耳座上端设置有送丝导块,送丝驱动轮前后两端分别对称设置有转杆,转杆安装在送丝耳座上,送丝驱动电机主轴与送丝驱动轮的转杆相连接。本发明通过送丝驱动轮的啮合旋转实现了焊丝从储丝机构上垂直由上往下的输送,且通过伺服电机可带动焊枪的