
一种轮毂马达液压驱动系统蓄能器流量控制方法.pdf

雨星****萌娃

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮毂马达液压驱动系统蓄能器流量控制方法.pdf
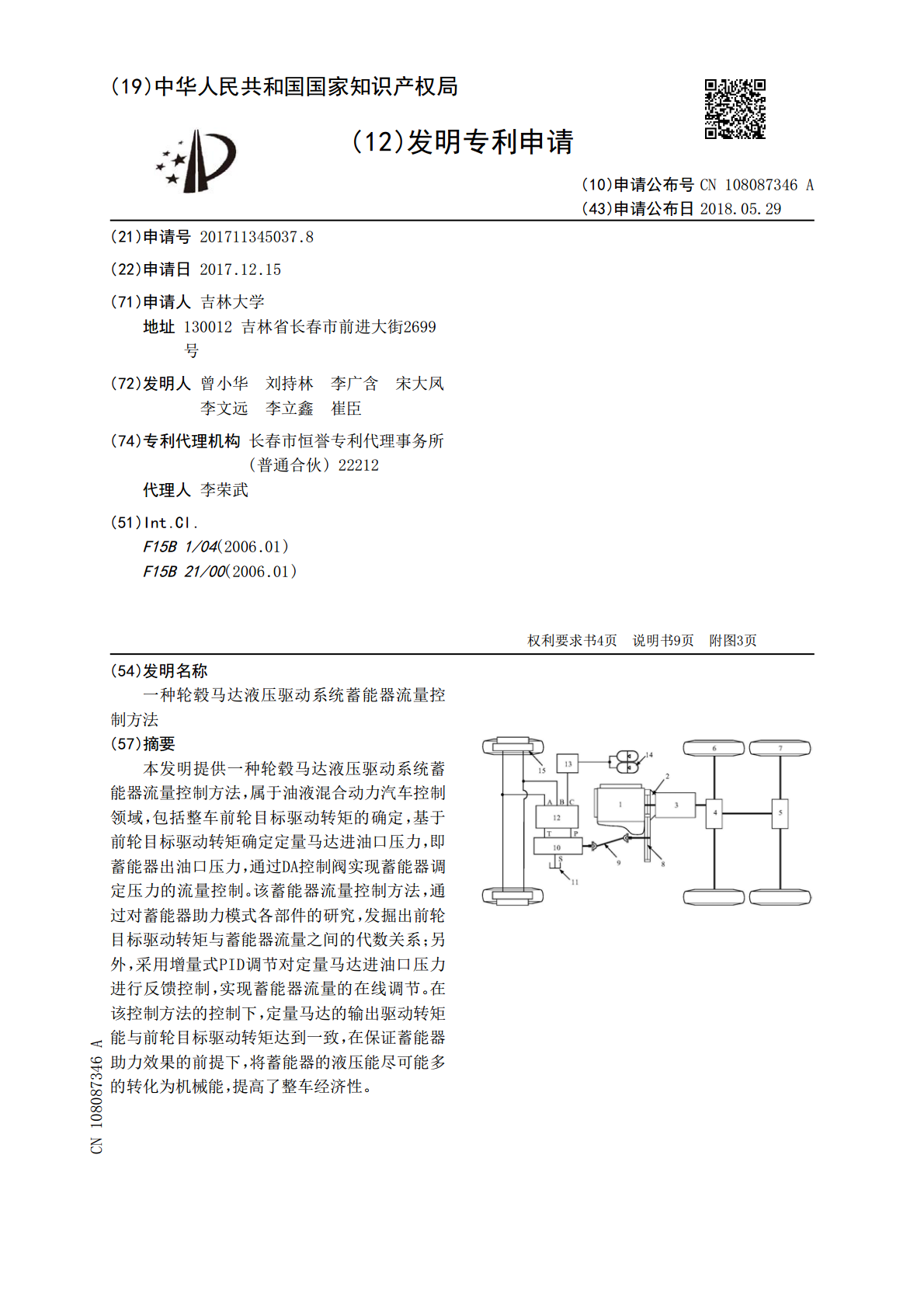
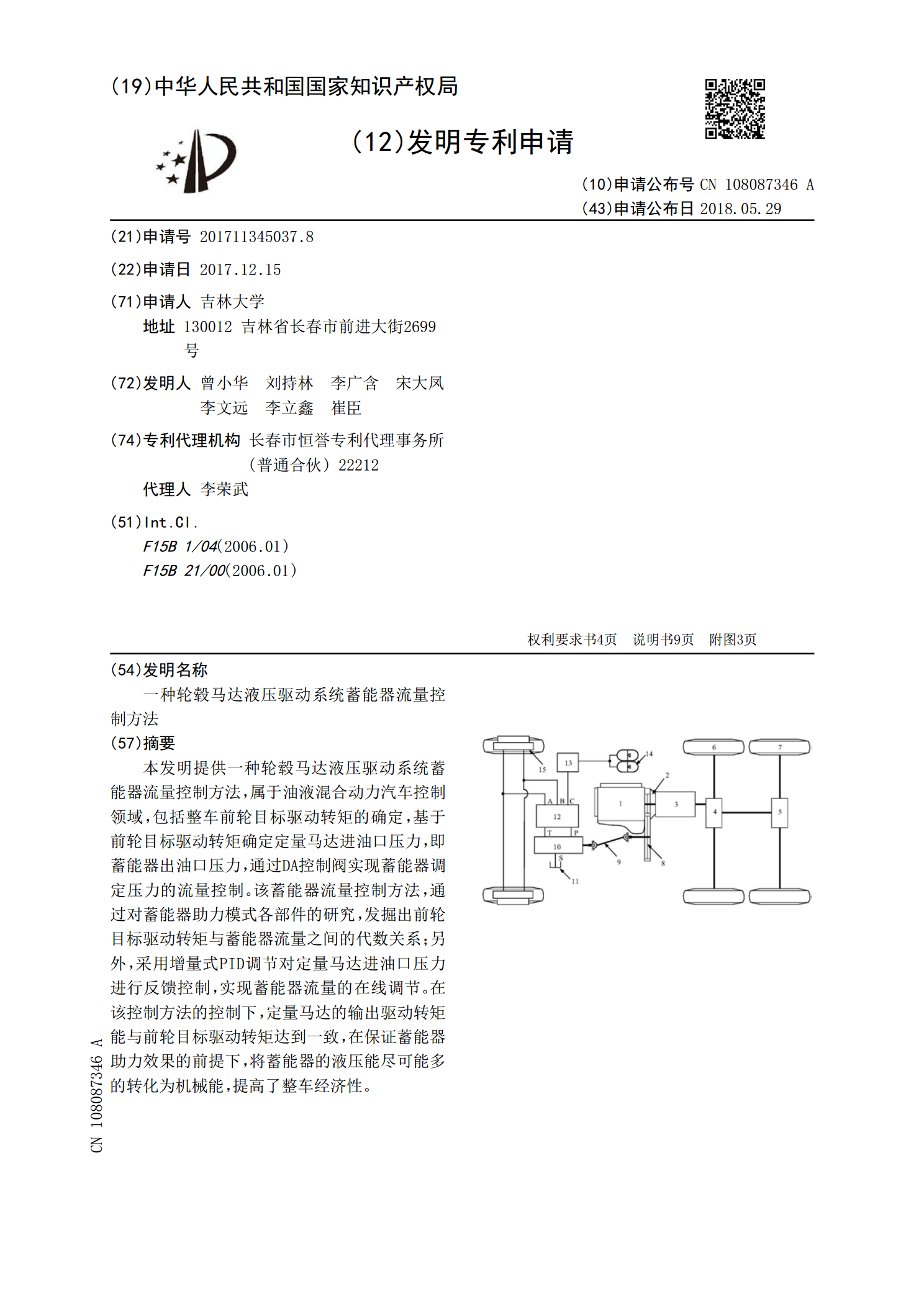
本发明提供一种轮毂马达液压驱动系统蓄能器流量控制方法,属于油液混合动力汽车控制领域,包括整车前轮目标驱动转矩的确定,基于前轮目标驱动转矩确定定量马达进油口压力,即蓄能器出油口压力,通过DA控制阀实现蓄能器调定压力的流量控制。该蓄能器流量控制方法,通过对蓄能器助力模式各部件的研究,发掘出前轮目标驱动转矩与蓄能器流量之间的代数关系;另外,采用增量式PID调节对定量马达进油口压力进行反馈控制,实现蓄能器流量的在线调节。在该控制方法的控制下,定量马达的输出驱动转矩能与前轮目标驱动转矩达到一致,在保证蓄能器助力效果
液压轮毂马达驱动系统.pdf
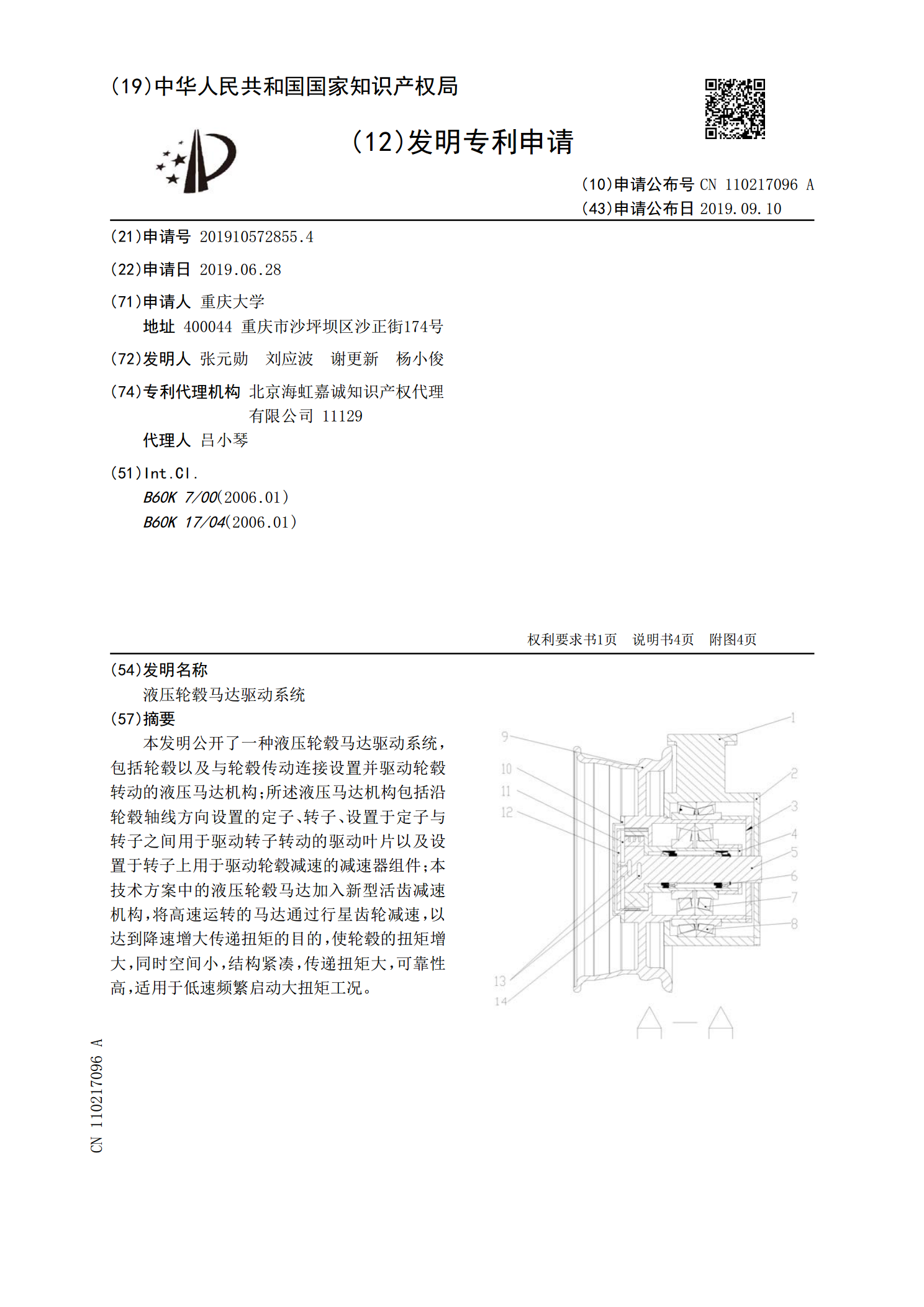
本发明公开了一种液压轮毂马达驱动系统,包括轮毂以及与轮毂传动连接设置并驱动轮毂转动的液压马达机构;所述液压马达机构包括沿轮毂轴线方向设置的定子、转子、设置于定子与转子之间用于驱动转子转动的驱动叶片以及设置于转子上用于驱动轮毂减速的减速器组件;本技术方案中的液压轮毂马达加入新型活齿减速机构,将高速运转的马达通过行星齿轮减速,以达到降速增大传递扭矩的目的,使轮毂的扭矩增大,同时空间小,结构紧凑,传递扭矩大,可靠性高,适用于低速频繁启动大扭矩工况。

轮毂马达液压驱动系统.pdf
本发明公开了一种轮毂马达液压驱动系统,其包括发动机(1)、离合器(2)、变速箱(3)、取力器(4)、变量泵(14)、液压控制阀组(6)与2个轮毂液压马达(9)。发动机(1)通过离合器(2)与变速箱(3)输入轴连接,取力器(4)输入轴和变速箱(3)中间轴连接,取力器(4)输出轴与变量泵(14)输入轴连接。变量泵(14)高压油出口和液压控制阀组(6)高压油进口连接,变量泵(14)低压油进口和液压控制阀组(6)低压油出口连接,液压控制阀组(6)高压油出口和两个前轮(13)上的2个轮毂液压马达(9)高压油进口连接

液压轮毂马达辅助驱动系统.pdf
本发明为解决传统后驱车辆在低附着系数路面及大坡度路面上无法满足动力性要求、现有轮毂马达液压驱动系统无法满足轮毂马达大流量要求的问题,提出了一种液压轮毂马达辅助驱动系统,包括液压泵组件、控制阀组、控制器、取力装置、取力装置输出轴、左前轮、左轮毂马达、右轮毂马达、右前轮、油箱,控制阀组中的各个换向阀之间管路连接,控制阀组中各个换向阀与控制器电路连接,本发明取力装置驱动液压泵,控制器切换控制阀组的工作位置从而形成多种工作模式,电磁换向阀控制液动换向阀的控制油液,从而控制轮毂马达的工作状态,本发明的控制阀组能够保
一种轮毂液压马达辅助驱动系统的模型预测控制方法.pdf
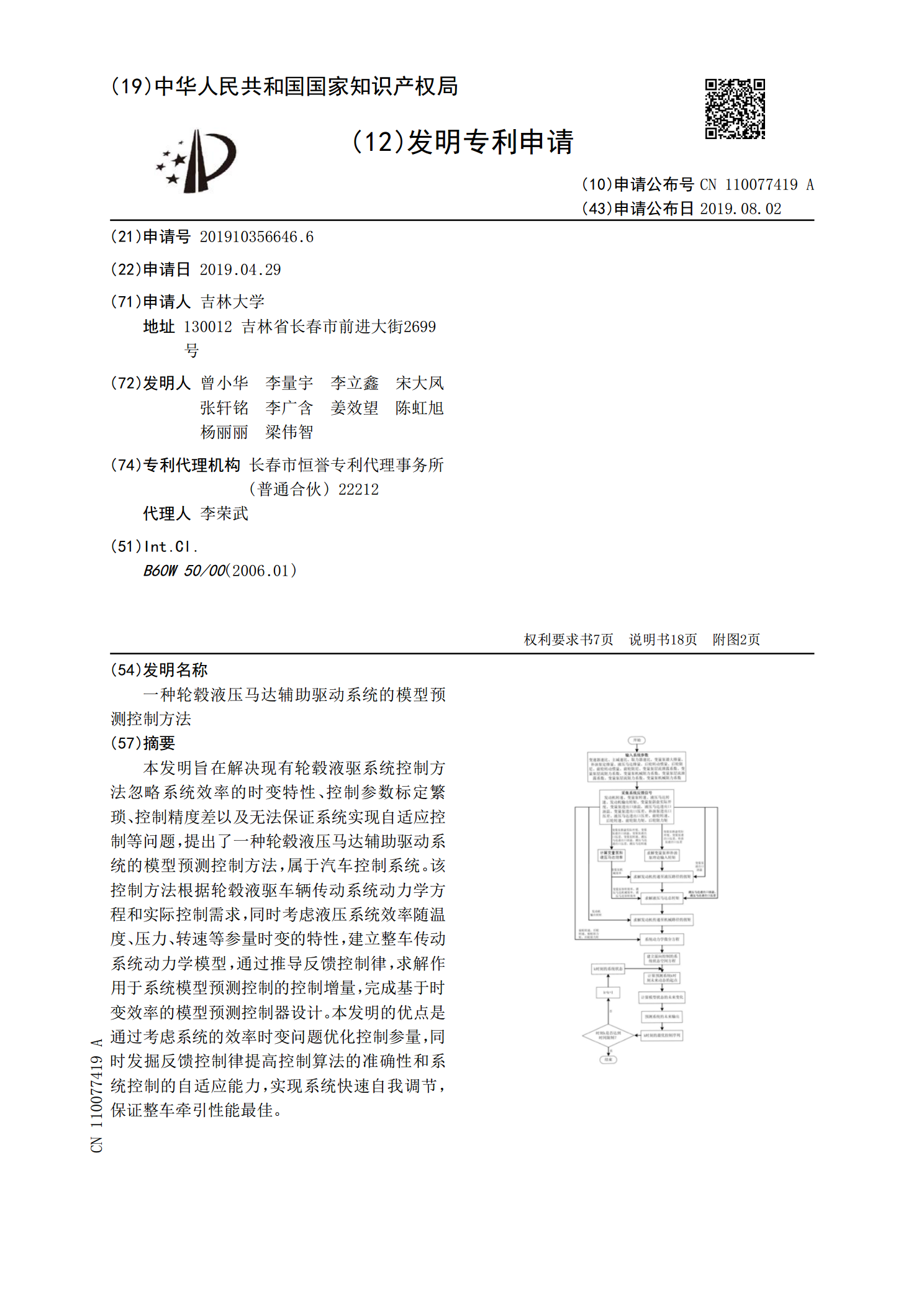
本发明旨在解决现有轮毂液驱系统控制方法忽略系统效率的时变特性、控制参数标定繁琐、控制精度差以及无法保证系统实现自适应控制等问题,提出了一种轮毂液压马达辅助驱动系统的模型预测控制方法,属于汽车控制系统。该控制方法根据轮毂液驱车辆传动系统动力学方程和实际控制需求,同时考虑液压系统效率随温度、压力、转速等参量时变的特性,建立整车传动系统动力学模型,通过推导反馈控制律,求解作用于系统模型预测控制的控制增量,完成基于时变效率的模型预测控制器设计。本发明的优点是通过考虑系统的效率时变问题优化控制参量,同时发掘反馈控制