
用于测量可运动的物体的方法和测量系统.pdf

fa****楠吖

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于测量可运动的物体的方法和测量系统.pdf
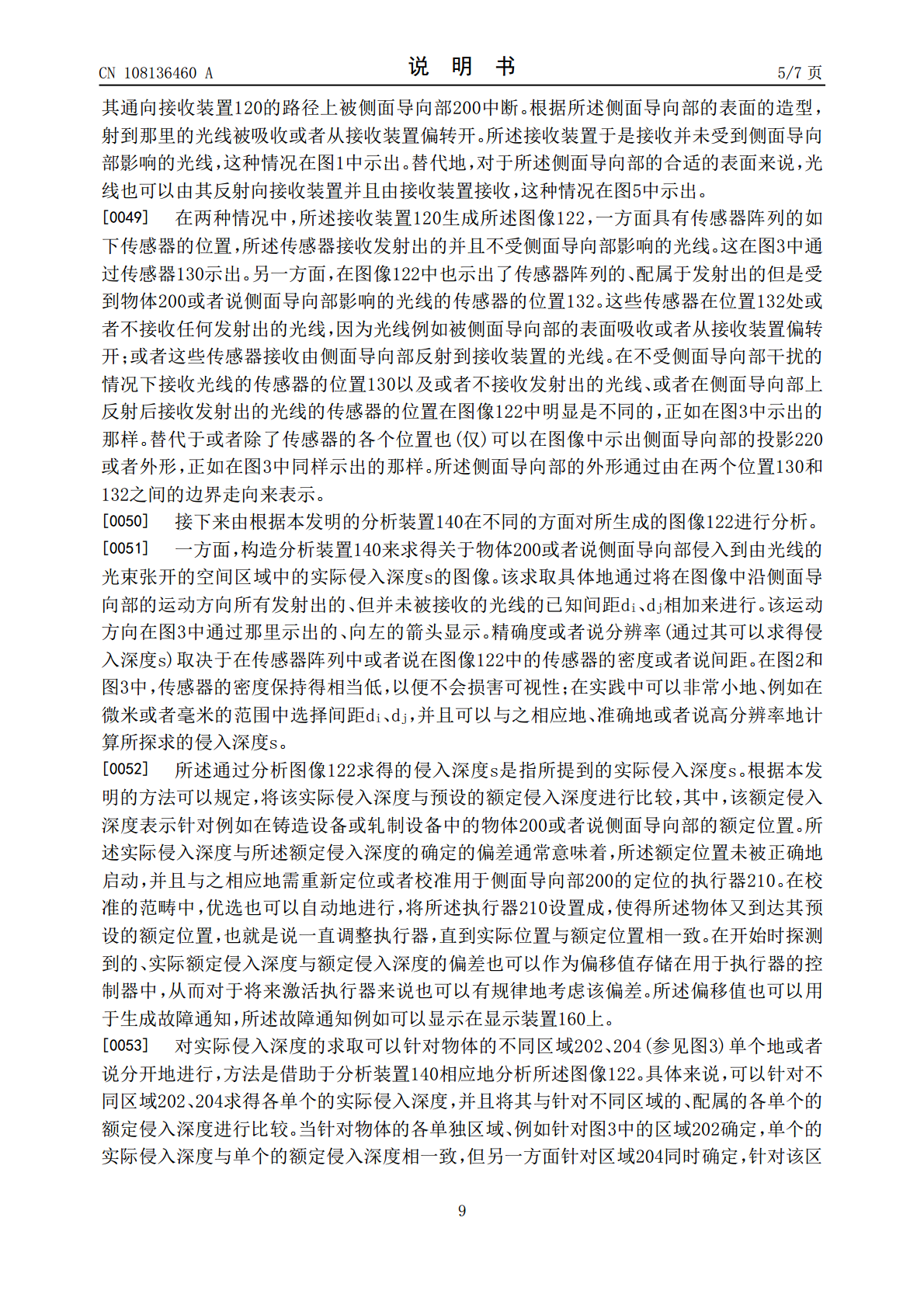
本发明涉及一种用于测量可运动的物体的方法以及一种用于测量可运动的物体的测量系统,所述物体例如是在冶金技术的设备中的铸坯的输送路径处的侧面导向部。所述系统具有至少一个用于发射出平行的光线(130)的光源(110)以及一用于接收光线的、带有传感器阵列的接收装置(120)。分析装置用于分析由传感器阵列接收的光线。为了能够更简单且更快速地进行分析,接收装置构造用于生成所述传感器阵列的图像,所述图像具有所述传感器阵列的、配属于不受物体影响的光线的传感器的位置并且具有所述传感器阵列的、配属于发射出的但受到驶入的物体影

用于车辆称重的方法、和测量系统及用于该测量系统的测量装置.pdf
本发明涉及一种借助至少一个WIM传感器(5)在道路(4)路段(3)行驶期间确定车辆(1)的重量G的方法。在该车辆(1)驶过期间,在路段(3)中检测整个碾压期间作为时间函数的所有车轮(2)或双车轮的轮载Fi(t)以及车辆(1)的速度vi(t);并且在确定重量G的数据分析中,速度vi(t)及其随着时间的变化被用作同时被检测的轮载Fi(t)的加权。根据本发明,WIM传感器(5)在行驶方向上比车轮的支承面的长度(14)要窄。
用于光学检查和测量物体表面的方法和系统.pdf
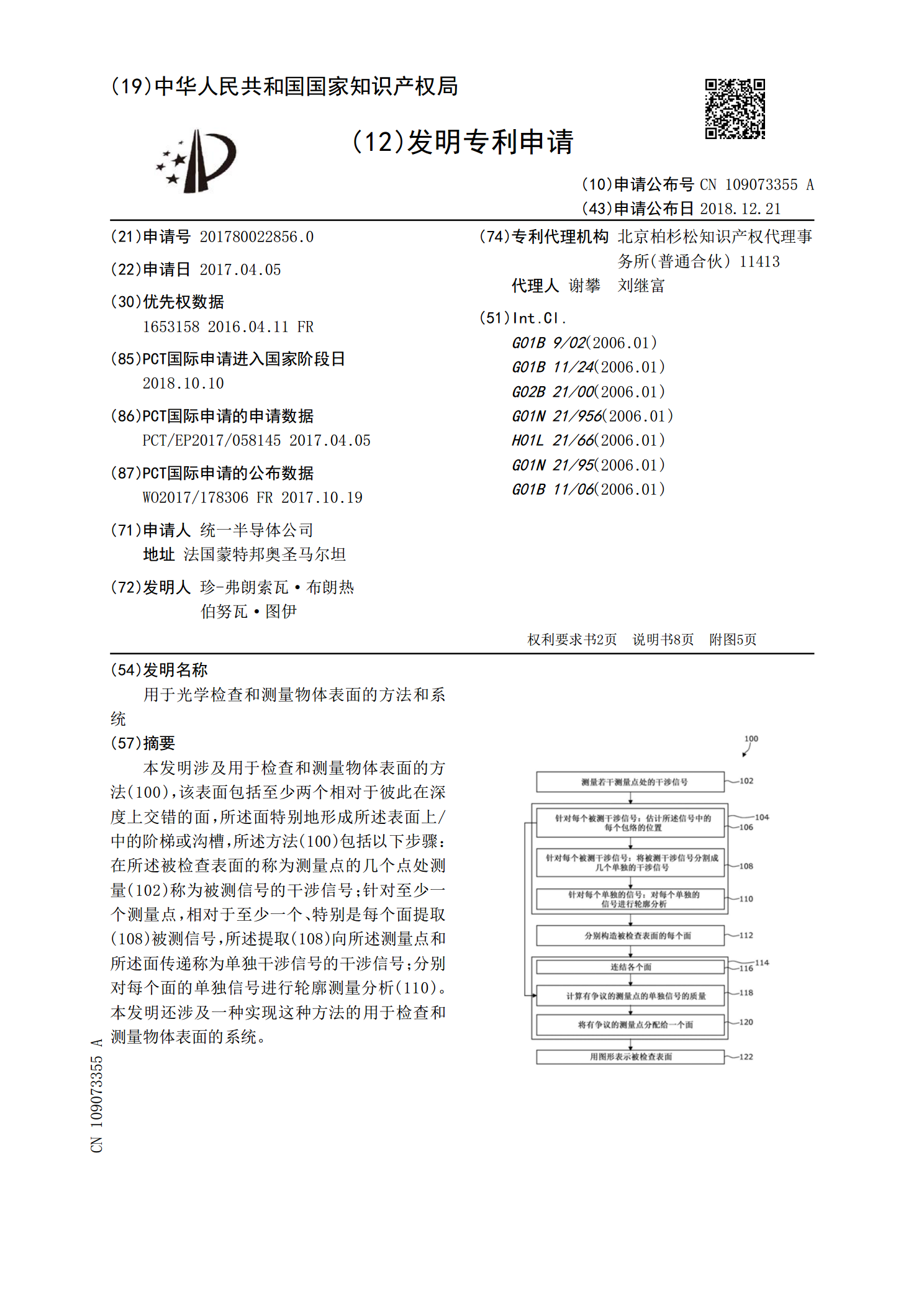
本发明涉及用于检查和测量物体表面的方法(100),该表面包括至少两个相对于彼此在深度上交错的面,所述面特别地形成所述表面上/中的阶梯或沟槽,所述方法(100)包括以下步骤:在所述被检查表面的称为测量点的几个点处测量(102)称为被测信号的干涉信号;针对至少一个测量点,相对于至少一个、特别是每个面提取(108)被测信号,所述提取(108)向所述测量点和所述面传递称为单独干涉信号的干涉信号;分别对每个面的单独信号进行轮廓测量分析(110)。本发明还涉及一种实现这种方法的用于检查和测量物体表面的系统。

用于测量受拉物体重量的系统和方法.pdf
本发明公开了一种在拉动联接到绳索第一端的物体时测量物体重量的系统和方法。所述绳索经过悬挂在测压元件上的滑轮。使用由绳索施加到滑轮上的力来计算所述物体的重量。所述绳索的第二端联接到卷筒上,当卷筒旋转时通过在卷筒上缠绕绳索来拉动物体。一个臂在一端联接到滑轮并且在另一端联接到框架。绳索在滑轮和卷筒之间行经的路径基本平行于所述臂的纵向轴线。力的水平分量通过所述臂传递到框架上,不会影响由测压元件测量的力,因此提高了计算出的物体重量的精确度。

用于筑路机械的测量系统和测量方法.pdf
本发明涉及用于筑路机械的测量系统和测量方法。用于筑路机械的测量系统(1)包括控制单元(2),所述控制单元使用现场总线(6)可操作地连接到至少一个现场设备(3,4,5),其中在所述测量系统(1)中能够分别向连接在所述现场总线(6)中的每个现场设备(3,4,5)分配专用总线地址。此外,本发明还涉及对至少一个现场设备(3,4,5)编址的方法。