
一种纯气动助力机械臂装置.pdf

一只****呀盟


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种纯气动助力机械臂装置.pdf
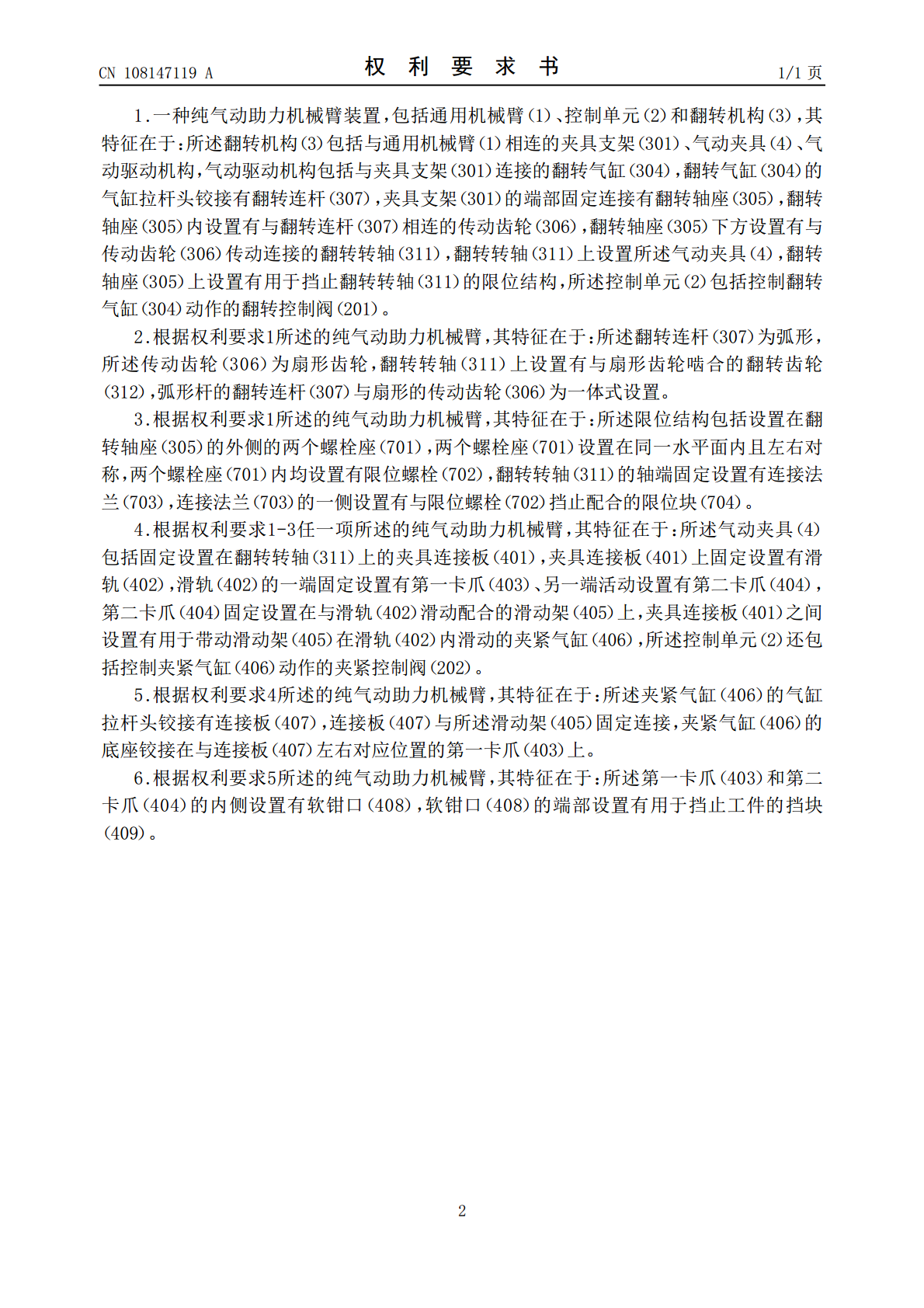
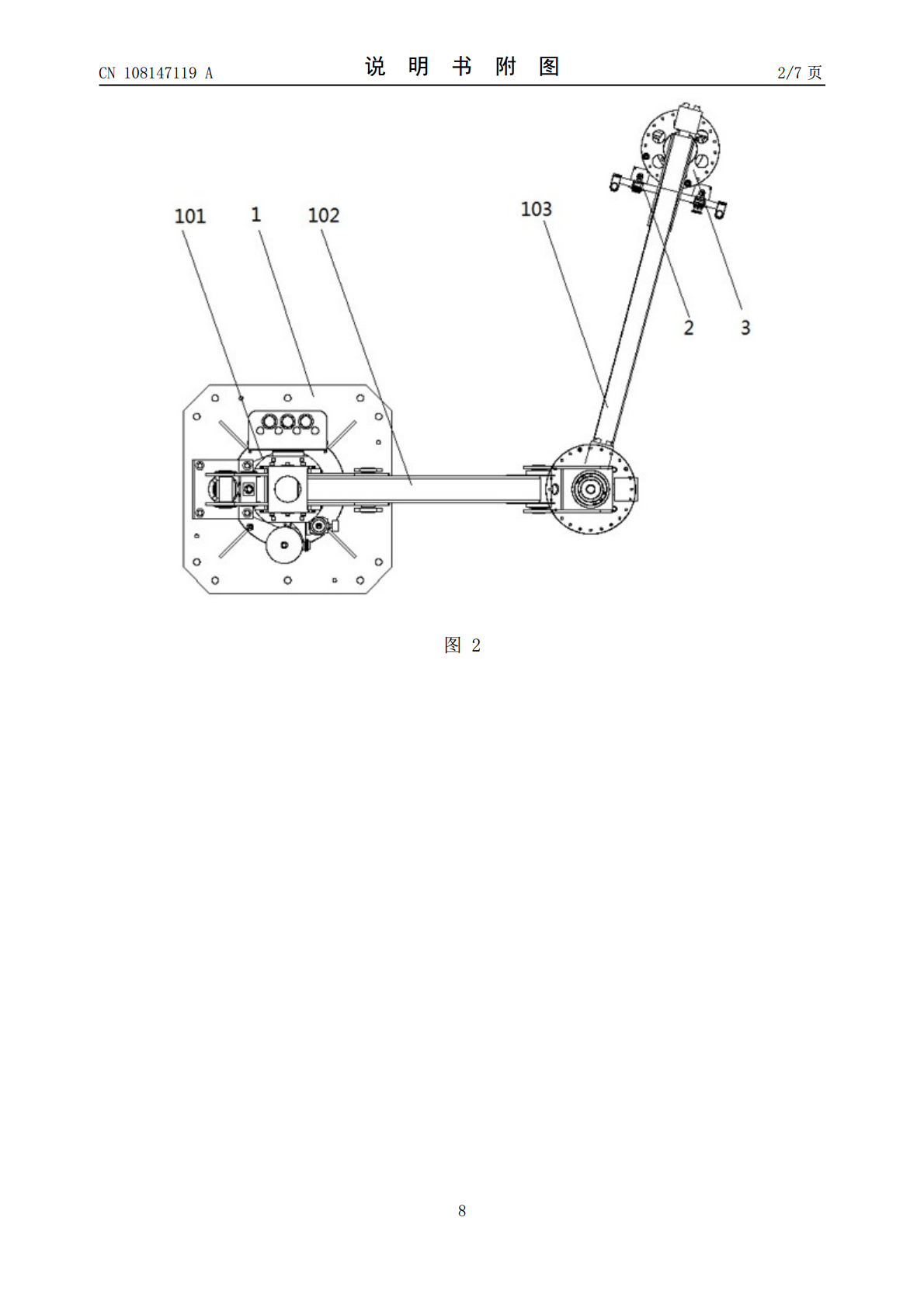
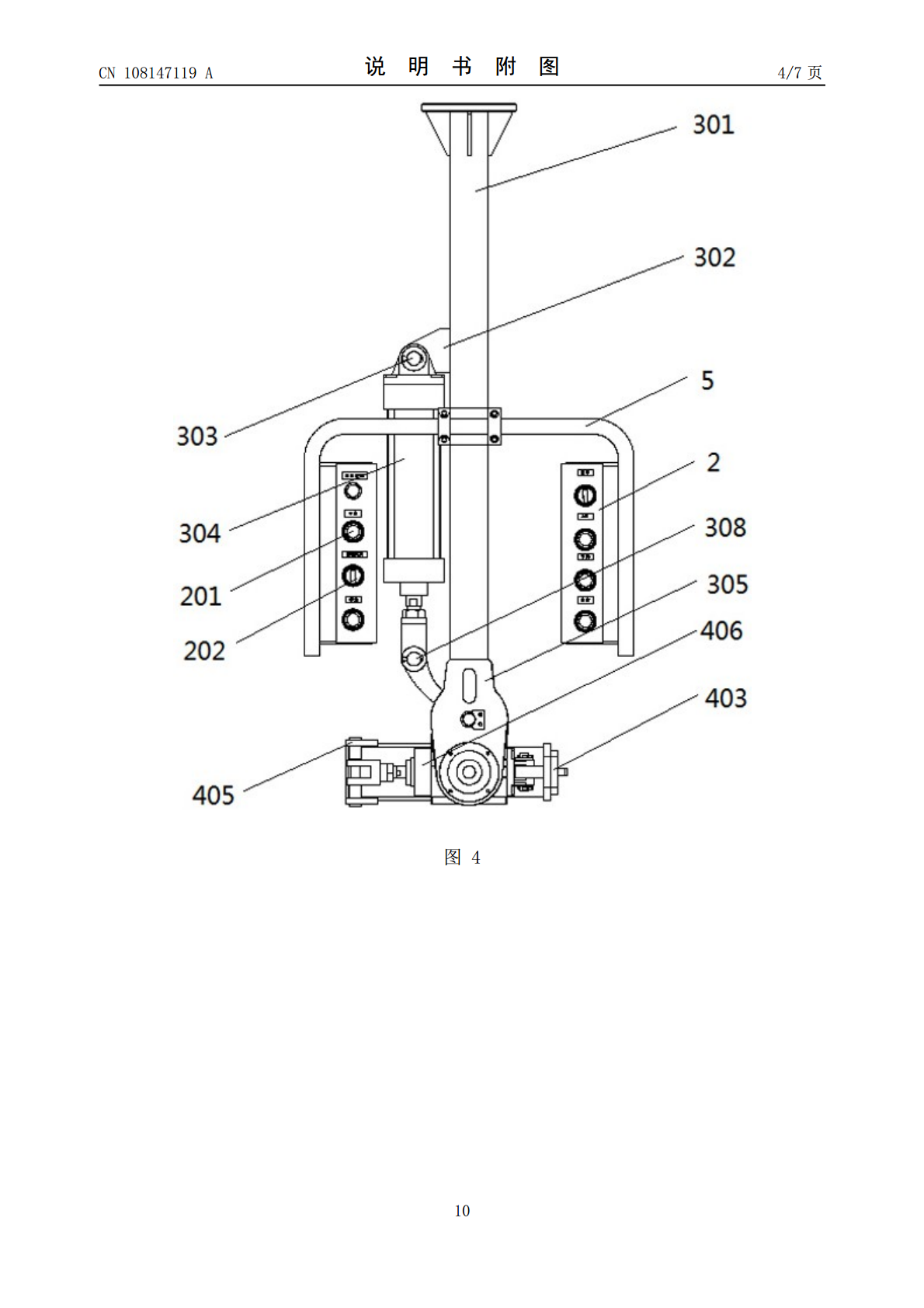
本发明公开了一种纯气动助力机械臂装置,解决了现有技术中加油机制造过程中自吸式齿轮油泵移动和翻转效率低下、工人劳动强度高、安全系数低的技术问题。本发明包括通用机械臂、控制单元和翻转机构,所述翻转机构包括与通用机械臂相连的夹具支架、气动夹具、气动驱动机构,气动驱动机构包括与夹具支架连接的翻转气缸,翻转气缸的铰接有翻转连杆,夹具支架的端部固定连接有翻转轴座,翻转轴座内设置有与翻转连杆相连的传动齿轮,翻转轴座下方设置有与传动齿轮传动连接的翻转转轴,翻转转轴上设置所述气动夹具,翻转轴座上设置有限位结构。本发明具有结

一种助力托举机械臂装置.pdf
本发明涉及一种助力托举机械臂装置,包括:腰卡组件,用于装配在使用人员的腰间的背部位置;支臂组件,连接在所述腰卡组件上,其末端向侧部延伸并能在水平方向上弯折;支撑杆组件,包括其底端铰接在所述支臂组件的末端的调节杆以及连接在所述支臂组件的末端与所述调节杆的上部之间的且能使所述调节杆相对所述支臂组件保持在相应角度状态的辅助连接件;托架组件,连接在所述调节杆的顶端,用于放置待支撑物件。该助力托举机械臂装置能够方便地供使用人员佩戴在腰间背部位置,其体积小巧,方便携带,满足了使用人员各种射击训练的需求,不受场地等因素
一种助力机械臂.pdf
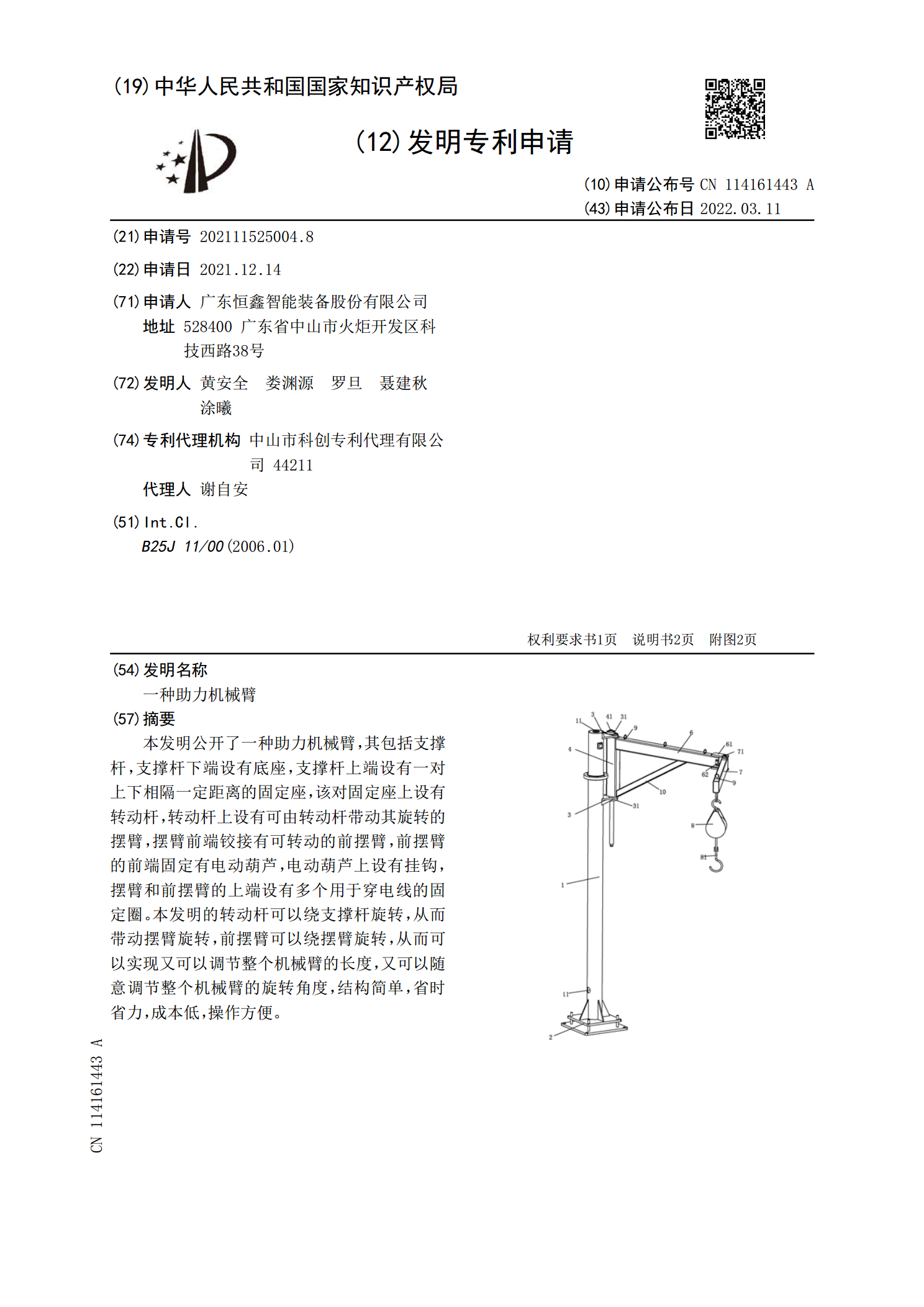
本发明公开了一种助力机械臂,其包括支撑杆,支撑杆下端设有底座,支撑杆上端设有一对上下相隔一定距离的固定座,该对固定座上设有转动杆,转动杆上设有可由转动杆带动其旋转的摆臂,摆臂前端铰接有可转动的前摆臂,前摆臂的前端固定有电动葫芦,电动葫芦上设有挂钩,摆臂和前摆臂的上端设有多个用于穿电线的固定圈。本发明的转动杆可以绕支撑杆旋转,从而带动摆臂旋转,前摆臂可以绕摆臂旋转,从而可以实现又可以调节整个机械臂的长度,又可以随意调节整个机械臂的旋转角度,结构简单,省时省力,成本低,操作方便。

气动平衡助力机械臂理论研究与仿真分析.docx
气动平衡助力机械臂理论研究与仿真分析气动平衡助力机械臂是一种利用气体压力与力矩平衡的机械臂,广泛应用于工业机械的搬运、装配和操作等领域。本文将从理论研究和仿真分析两个方面探讨气动平衡助力机械臂的相关内容。气动平衡助力机械臂是基于气动原理实现力矩平衡的一种机械臂。其核心原理是通过气源提供气体压力,使得机械臂的重力矩与气体压力产生的力矩平衡,从而减小操纵力,提高操作效率。具体而言,气动平衡助力机械臂由气源系统、传感器、控制系统和机械臂系统构成。气源系统提供压缩空气,传感器用于感知机械臂的状态,控制系统根据传感

一种自行车气动助力装置.pdf
一种自行车气动助力装置,包括自行车后轮,摩擦轮带花纹的凹槽紧压在自行车后轮的外胎上,摩擦轮连接在马达泵的输出轴上,马达泵连接在Y型架上,Y型架固定在车架上,车架上安装有转阀和气罐,转阀的下部设有重锤,转阀、马达泵、气罐、第一单向阀和第二单向阀连通构成一个气压传动系统,采用自动控制或手动控制,下坡时自行车的部分势能经马达泵转换成压缩空气的压力能储存于气罐中,既降低了车速,将能量储存起来以备再用;上坡时将气罐所储存的压缩空气能量释放,经马达泵转化成机械能,充当辅助动力协助骑行,本发明结构简单、控制方式灵活、成